裸奔程序之定时器&PWM
开发环境:ADS1.2
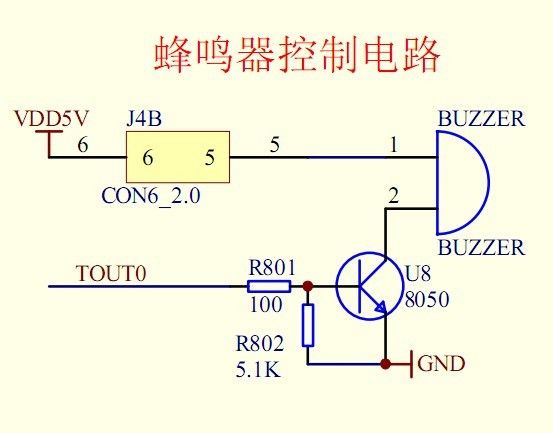
实验实现功能:利用TQ2440开发板与PC机通过串口连接,
通过PC机的“+”“-”“Esc”键来控制开发板蜂鸣器的频率。
——————————————————————————————————————————————
下面是自己写的main.c程序
——————————————————————————————————————————————
#include "2440addr.h"
#include "2440lib.h" //这个只使用了这个文件的延迟函数,和串口有关的函数
void Beep_Freq_Set( U32 freq )
{
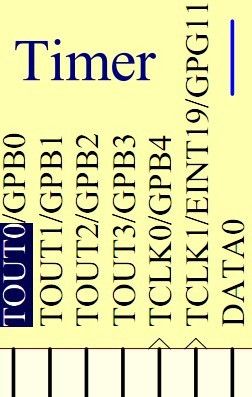
rGPBCON &=~3;
rGPBCON |=2; //设置GPB0为OUT0
rGPBUP=0x0; //使能上拉
rTCFG0 &=~0xff;
rTCFG0 |=15; //预分频值为15
rTCFG1 &=~0x0f;
rTCFG1 |=0x02; //分频值为8
rTCNTB0 = (PCLK>>7)/freq; //设定定时器0计数缓冲器的值
rTCMPB0 = rTCNTB0>>1; // 定时器0比较缓冲器的值,PWM输出占空比50%
rTCON &= ~0x1f;
rTCON |= 0xb; //自动重载,关闭变相,手动更新,开启定时器0
rTCON &= ~2; //清除手动更新位
}
void Beep_Stop( void )
{
rGPBCON &= ~3; //set GPB0 as output
rGPBCON |= 1;
rGPBDAT &= ~1; //输出低电平
}
void Beep_Init(U32 freq, U32 ms)
{
Beep_Stop() ;
Delay( ms ) ;
Beep_Freq_Set( freq ) ;
}
void Main()
{
U16 freq=800;
SelectFclk(2); //设置系统时钟 400M
ChangeClockDivider(2, 1); //设置分频 1:4:8
CalcBusClk(); //计算总线频率
rGPHCON &=~((3<<4)|(3<<6));
rGPHCON |=(2<<4)|(2<<6); //GPH2--TXD[0];GPH3--RXD[0]
rGPHUP=0x00; //使能上拉功能
Uart_Init(0,115200);
Uart_Select(0);
Uart_Printf( "\nBUZZER TEST ( PWM Control )\n" );
Uart_Printf( "Press +/- to increase/reduce the frequency of BUZZER !\n" ) ;
Uart_Printf( "Press 'ESC' key to Exit this program !\n\n" );
Beep_Init( freq ,50) ;
while( 1 )
{
U8 key = Uart_Getch();
if( key == '+' )
{
if( freq < 2000 ) //lci 20000
freq += 10 ;
Beep_Freq_Set( freq ) ;
}
if( key == '-' )
{
if( freq > 11 )
freq -= 10 ;
Beep_Freq_Set( freq ) ;
}
Uart_Printf( "\tFreq = %d\n", freq ) ;
if( key == ESC_KEY )
{
Beep_Stop() ;
return ;
}
}
}
—————————————————————————————————————————————————
我们来首先上来先分析main函数,SelectFclk(2); //设置系统时钟 400M
void SelectFclk(int i) //from 2440lib.c
{
U32 mpll_val=0;
switch ( i )
{
case 0: mpll_val = (92<<12)|(4<<4)|(1); break; //200M
case 1: mpll_val = (67<<12)|(1<<4)|(1); break; //300M
case 2: mpll_val = (92<<12)|(1<<4)|(1); break; //400M
case 3: mpll_val = (102<<12)|(1<<4)|(1); break; //440M!!!
default: mpll_val = (92<<12)|(1<<4)|(1); break;
}
rMPLLCON = mpll_val;
}
—————————————————————————————————————————————————
接着执行 ChangeClockDivider(2, 1); //设置分频 1:4:8
void ChangeClockDivider(int hdivn,int pdivn) //from 2440lib.c
{
// hdivn,pdivn FCLK:HCLK:PCLK
// 0,0 1:1:1
// 0,1 1:1:2
// 1,0 1:2:2
// 1,1 1:2:4
// 2,0 1:4:4
// 2,1 1:4:8
// 3,0 1:3:3
// 3,1 1:3:6
rCLKDIVN = (hdivn<<1) | pdivn;
if (hdivn == 2)
rCAMDIVN = (rCAMDIVN & ~(3<<8)) | (1<<9);
if (hdivn == 3)
rCAMDIVN = (rCAMDIVN & ~(3<<8)) | (1<<8);
if(hdivn!=0)
MMU_SetAsyncBusMode(); //设置异步总线模式
else
MMU_SetFastBusMode(); //设置快速总线模式
}
—————————————————————————————————————————————————
接着执行CalcBusClk(); //计算总线频率
这个函数在系统时钟那节已经讲过,这里不再重复。
rGPHCON &=~((3<<4)|(3<<6));
rGPHCON |=(2<<4)|(2<<6); //GPH2--TXD[0];GPH3--RXD[0]
rGPHUP=0x00; //使能上拉功能
上面这三句的意思是,使用GPH2管脚启动UART复用功能使之变为TXD0管脚,同理GPH3变为RXD0管脚,并使能上拉,让数据传输更稳定。
Uart_Init(0,115200);
Uart_Select(0);
上面这二个函数是设置串口参数,使用UATR0,波特率为115200。这些在UART那一节已经详细介绍过,这里不再详述。
Beep_Init( freq ,50) ; 这个是我们重点掌握的函数。它里面又调用了二个重要的函数;
void Beep_Init(U32 freq, U32 ms)
{
Beep_Stop() ;
Delay( ms ) ;
Beep_Freq_Set( freq ) ;
}
void Beep_Stop( void )
{
rGPBCON &= ~3; //set GPB0 as output
rGPBCON |= 1;
rGPBDAT &= ~1; //输出低电平
}
rGPBCON |=2; //设置GPB0为OUT0
rTCFG0 |=15; //预分频值为15
rTCFG1 &=~0x0f;
rTCFG1 |=0x02; //分频值为8
rTCON |= 0xb; //自动重载,关闭变相,手动更新,开启定时器0
rTCON &= ~2; //清除手动更新位