单源最短路问题
最短路问题是图论中最基础的问题,在面试题中出现的次数也很多,很多类似最少步数等问题都能转化到最短路问题,这篇文章介绍单源最短路问题的两种算法。单源最短路问题是固定一个起点,求它到其他所有点的最短路问题,如果只求两个固定点之间的最短路,看起来要简单很多,但其实复杂度是一样的,所以我们广泛的讨论单源最短路问题。
1Bellman-Ford算法
我们定义从点s到目的地点i的距离为d[i],这样我们需要i=0到i=E-1(E为顶点)时的所有的d[i]。
把问题划分成子问题,假设顶点j和i之间有一条边连着,那么d[i]=min{d[j]+(j到i的边的权值)}。
需要注意的是:如果图中有圈,比如i到j为3,j到i为4,我们不知道是先计算d[i]还是d[j],这时这时只要把所有的d[i]初始化为INF(i不为s),我们先计算哪个就没有关系了。因为即使只要满足d[j]+(j到i的边的权值)比原来的d[i]小,我们就更新d[i]的值。
这样我们就可以直接利用这条递归关系写出代码如下:
struct edge{ int from, to , cost} //边的结构体:顶点from到顶点to的权值cost
edge es[MAX_E]; //边的数组
int d[MAX_V]; //距离的数组
int V,E; //顶点数和边数
void shortest_path(int s){
for (int i=0;i<V;i++)
d[i]=INF;
d[s]=0;
while(true)
bool update=false;
for(int i=0;i<E;i++)
edge e=es[i];
if(d[e.from]!=INF&&d[e.to]>d[e.form]+e.cost){ //从已经想连的顶点中找到满足条件的
d[e.to]=d[e.from]+e.cost;
update=true;
}
}
if(!update) break; //所有顶点都更新过后,结束
}
}复杂度:while最多循环|V|-1次,所以是O(|V|*|E|)。
注意:如果图中存在负圈(例:i到j为-1,j到i为-2),那么最短路径就沿着负圈一直无限循环。。。我们可以判定如果while的第|V|次循环也更新的话,那么就存在负圈。
2Dijkstra算法
Dijkstra算法是一种特殊情况,即当图中没有负边的情况,这种情况是很符合实际情况的,比如两个旅行目的地的距离。既然都是正数,那么我们可以想一下,如果d[j]还不睡最短距离,那么即使d[i]=d[j]+(权值)更新了,d[i]也不是最短距离。而且上段代码中每次对顶点V的循环中,要检查一遍和顶点相连的所有的边,这有点浪费时间。所以算法贪心的修改如下:
(1)找到最短距离确定的点,从它出发更新相邻顶点的距离。
(2)已经确定的点就不用再管了。
这个确定的点就是未使用过的顶点中,距离最小的顶点,因为没有负边,这个确定的点不会再之后的更新中变小。
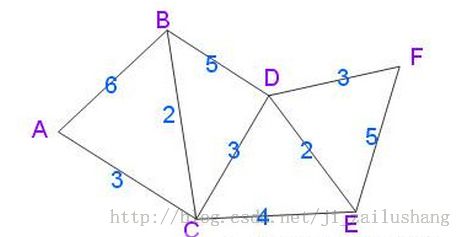
本图中:确定点的先后顺序依次为A,C,B,D,E,F
代码如下:
int cost[MAX_V][MAX_E]
int d[MAX_V];
bool used[MAX_V];
int V;
void dijkstra(int s){
fill(d,d+V,INF);
fill(used,used+V,false);
d[s]=0;
while(true){
int v=-1;
for(int u=0;u<V;u++){ //从未使用的顶点中选择一个距离最小的顶点(while的第一次循环选择的是点s)
if(!used[u]&&(v==-1||d[u]<d[v]))
v=u;
}
if (v==-1) break;
used[v]=true;
for(int u=0;u<V;u++){
d[u]=min(d[u],d[v]+cost[v][u]); //更新和确定的点相连的点的距离
}
}
}这种写法的复杂度是O(|V|^2),代码中大部分时间花在查找下一个使用的顶点上,我们可以使用好的数据结构保护好这个顶点,在有数值插入的情况下要得到集合中的最小值,那么最好的数据结构是堆,堆中元素有O(|V|)个,需要更新O(|E|)次,所以复杂度为O(|E|log|V|)。
下面用STL中的优先级队列(priority_queue实现):
struct edge{int to, cost}
typedef pair<int ,int> P; //first是最短距离,second是顶点编号
int d[MAX_V];
vector<edge> G[MAX_V];//邻接表
int V;
void dijkstra(int s){
priority_queue<P,vector<p>,greater<p>> que; //greater表示从小到大
fill(d,d+V,INF);
d[s]=0;
que.push(P(0,s));
while(!que.empty()){
P p=que.top(); //取出确定点
que.pop();
int v=p.second;
if(d[v]<p.first) continue;
for(int i=0;i<G[v].size();i++)
{
edge e=G[v][i]; //边为从点v到点i
if(d[e.to]>d[v]+e.cost;){
d[e.to]=d[v]+e.cost;
que.push(P(d[e.to],e.to)); //把更新的距离和点放进堆
}
}
}
}如果使用斐波那契堆,性能还能提高,就是有点复杂。
总之在没有负边的情况下Dijkstra算法性能优于Bellman-Ford算法。所以这种方法非常重要,需要仔细专研其中原理。