Direct-X学习笔记--三维摄像机
一.介绍
哇!到了传说中的3D摄像机啦!
之前我们写的东东,都是观察点不动,通过世界变换让东西动,今天,通过三维摄像机我们就可以改变我们的观察点,观察方向,随意在三维空间中驰骋。之前我们所设定的视角都是通过D3DXMatrixLookAtLH这个函数,通过几个设定好的向量,将视角初始化的,而在程序真正运行时,视角就不再改变了,而这次,我们要实时的生成视角变换矩阵,实时的改变我们的视角,我们所谓的摄像机就是这个原理。
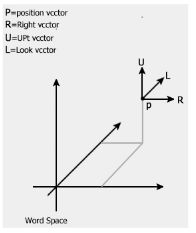
我们通过一个类来封装摄像机,这个类主要的字段就是用四个分量:右分量(rightvector)、上分量(up vector)、观察分量(lookvector)和位置分量(position vector),来确定一个摄像机相对于世界坐标系的位置和朝向。并根据这四个分量计算出一个取景变换矩阵,然后通过取景变换(VIEWTRANSFORM)实现改变视角。
通过这些分量,我们可以确定摄像机的位置和朝向。操作有平移和旋转,那么一共就有6中操作:
(1)沿着观察分量平移(前进后退)
(2)沿着观察分量旋转(左右翻滚)
(3)沿着右分量平移(左右移动)
(4)沿着右分量旋转(朝上下看)
(5)沿着上分量平移(上下移动)
(6)沿着上分量旋转(朝左右看)
二.操作
void CCamera::CalculateViewMatrix(D3DXMATRIX *pMatrix)
{
//规范化三个向量使之成为正交矩阵
//规范化观察向量
D3DXVec3Normalize(&m_vLookVector, &m_vLookVector);
//使上向量与观察向量垂直
D3DXVec3Cross(&m_vUpVector, &m_vLookVector, &m_vRightVector);
//规范化上向量
D3DXVec3Normalize(&m_vUpVector, &m_vUpVector);
//右向量与上向量垂直
D3DXVec3Cross(&m_vRightVector, &m_vUpVector, &m_vLookVector);
//规范化右向量
D3DXVec3Normalize(&m_vRightVector, &m_vRightVector);
//创建取景变换矩阵
pMatrix->_11 = m_vRightVector.x;
pMatrix->_12 = m_vUpVector.x;
pMatrix->_13 = m_vLookVector.x;
pMatrix->_14 = 0.0f;
pMatrix->_21 = m_vRightVector.y;
pMatrix->_22 = m_vUpVector.y;
pMatrix->_23 = m_vLookVector.y;
pMatrix->_24 = 0.0f;
pMatrix->_31 = m_vRightVector.z;
pMatrix->_32 = m_vUpVector.z;
pMatrix->_33 = m_vLookVector.z;
pMatrix->_34 = 0.0f;
pMatrix->_41 = -D3DXVec3Dot(&m_vRightVector, &m_vCameraPosition);
pMatrix->_42 = -D3DXVec3Dot(&m_vUpVector, &m_vCameraPosition);
pMatrix->_43 = -D3DXVec3Dot(&m_vLookVector, &m_vCameraPosition);
pMatrix->_44 = 1.0f;
}这样,我们就可以根据摄像机类中的四个向量(相机位置,上分量,右分量,观察分量)获得取景变换的矩阵,通过指针传递参数。这样,我们实时的根据这个矩阵进行取景变换,就可以得到实时的画面情况。而我们在逻辑部分要做的就是改变摄像机类中的各个分量即可。
/************************************************************************/
/* 封装一个摄像机类 */
/************************************************************************/
#ifndef __CCAMERA_H_
#define __CCAMERA_H_
#include "stdafx.h"
#pragma once
class CCamera
{
private:
//成员变量
IDirect3DDevice9* m_pDevice; //D3D设备对象
D3DXVECTOR3 m_vRightVector; //右分量向量
D3DXVECTOR3 m_vUpVector; //上分量向量
D3DXVECTOR3 m_vLookVector; //观察分量向量
D3DXVECTOR3 m_vCameraPosition; //摄像机位置
D3DXVECTOR3 m_vTargetPosition; //观察目标位置
D3DXMATRIX m_matView; //取景变换矩阵
D3DXMATRIX m_matProj; //投影变换矩阵
public:
CCamera(IDirect3DDevice9* pDevice);
~CCamera(void);
//计算取景变换矩阵
void CalculateViewMatrix(D3DXMATRIX *pMatrix);
//获得投影矩阵
void GetProjectionMatrix(D3DXMATRIX* pMatrix){*pMatrix = m_matProj;}
//获得当前摄像机位置向量
void GetCameraPosition(D3DXVECTOR3* pVector){*pVector = m_vCameraPosition;}
//返回当前观察向量
void GetLookVector(D3DXVECTOR3* pVector){*pVector = m_vLookVector;}
//设置摄像机观察位置向量(默认参数为NULL)
void SetTargetPosition(D3DXVECTOR3* pVector = NULL);
//设置摄像机所在位置向量(默认参数为NULL)
void SetCameraPosition(D3DXVECTOR3* pVector = NULL);
//设置取景变换矩阵(默认参数为NULL)
void SetViewMatrix(D3DXMATRIX* pMatrix = NULL);
//设置投影变换矩阵(默认参数为NULL)
void SetProjectionMartix(D3DMATRIX* pMatrix = NULL);
//沿着right分量平移
void MoveAlongRightVec(float fUnits);
//沿着up分量平移
void MoveAlongUpVec(float fUnits);
//沿着look分量平移
void MoveAlongLookVec(float fUnits);
//沿着right分量旋转
void RotationRightVec(float fAngle);
//沿着up分量旋转
void RotationUpVec(float fAngle);
//沿着look分量旋转
void RotationLookVec(float fAngle);
};
#endif // !__CCAMERA_H_
#include "stdafx.h"
#include "Camera.h"
CCamera::CCamera(IDirect3DDevice9* pDevice)
{
m_pDevice = pDevice;
//各个向量或坐标的初始值
m_vRightVector = D3DXVECTOR3(1.0f, 0.0f, 0.0f);
m_vUpVector = D3DXVECTOR3(0.0f, 1.0f, 0.0f);
m_vLookVector = D3DXVECTOR3(0.0f, 0.0f, 1.0f);
m_vCameraPosition = D3DXVECTOR3(0.0f, 0.0f, -200.0f);
m_vTargetPosition = D3DXVECTOR3(0.0f, 0.0f, 0.0f);
}
CCamera::~CCamera(void)
{
}
void CCamera::CalculateViewMatrix(D3DXMATRIX *pMatrix)
{
//规范化三个向量使之成为正交矩阵
//规范化观察向量
D3DXVec3Normalize(&m_vLookVector, &m_vLookVector);
//使上向量与观察向量垂直
D3DXVec3Cross(&m_vUpVector, &m_vLookVector, &m_vRightVector);
//规范化上向量
D3DXVec3Normalize(&m_vUpVector, &m_vUpVector);
//右向量与上向量垂直
D3DXVec3Cross(&m_vRightVector, &m_vUpVector, &m_vLookVector);
//规范化右向量
D3DXVec3Normalize(&m_vRightVector, &m_vRightVector);
//创建取景变换矩阵
pMatrix->_11 = m_vRightVector.x;
pMatrix->_12 = m_vUpVector.x;
pMatrix->_13 = m_vLookVector.x;
pMatrix->_14 = 0.0f;
pMatrix->_21 = m_vRightVector.y;
pMatrix->_22 = m_vUpVector.y;
pMatrix->_23 = m_vLookVector.y;
pMatrix->_24 = 0.0f;
pMatrix->_31 = m_vRightVector.z;
pMatrix->_32 = m_vUpVector.z;
pMatrix->_33 = m_vLookVector.z;
pMatrix->_34 = 0.0f;
pMatrix->_41 = -D3DXVec3Dot(&m_vRightVector, &m_vCameraPosition);
pMatrix->_42 = -D3DXVec3Dot(&m_vUpVector, &m_vCameraPosition);
pMatrix->_43 = -D3DXVec3Dot(&m_vLookVector, &m_vCameraPosition);
pMatrix->_44 = 1.0f;
}
void CCamera::SetTargetPosition(D3DXVECTOR3* pVector)
{
if (pVector)
m_vTargetPosition = (*pVector);
else
m_vTargetPosition = D3DXVECTOR3(0.0f, 0.0f, 1.0f);
//观察点位置减去摄像机位置得到坐标向量
m_vLookVector = m_vTargetPosition - m_vCameraPosition;
D3DXVec3Normalize(&m_vLookVector, &m_vLookVector);
//正交并规范化upV和rightV
D3DXVec3Cross(&m_vUpVector, &m_vLookVector, &m_vRightVector);
D3DXVec3Normalize(&m_vUpVector, &m_vUpVector);
D3DXVec3Cross(&m_vRightVector, &m_vUpVector, &m_vLookVector);
D3DXVec3Normalize(&m_vRightVector, &m_vRightVector);
}
void CCamera::SetCameraPosition(D3DXVECTOR3* pVector /* = NULL */)
{
D3DXVECTOR3 v = D3DXVECTOR3(0.0f, 0.0f, -250.0f);
m_vCameraPosition = pVector ? (*pVector) : v;
}
void CCamera::SetViewMatrix(D3DXMATRIX* pMatrix /* = NULL */)
{
if (pMatrix)
m_matView = *pMatrix;
else
CalculateViewMatrix(&m_matView);
m_pDevice->SetTransform(D3DTS_VIEW, &m_matView);
m_vRightVector = D3DXVECTOR3(m_matView._11, m_matView._12, m_matView._13);
m_vUpVector = D3DXVECTOR3(m_matView._21, m_matView._22, m_matView._23);
m_vLookVector = D3DXVECTOR3(m_matView._31, m_matView._32, m_matView._33);
}
void CCamera::SetProjectionMartix(D3DMATRIX* pMatrix /* = NULL */)
{
if (pMatrix)
m_matProj = *pMatrix;
else
D3DXMatrixPerspectiveFovLH(&m_matProj, D3DX_PI / 4.0F, 800 / 600, 1.0f, 30000.0f);
m_pDevice->SetTransform(D3DTS_PROJECTION, &m_matProj);
}
//平移操作
void CCamera::MoveAlongRightVec(float fUnits)
{
m_vCameraPosition += m_vRightVector * fUnits;
m_vTargetPosition += m_vRightVector * fUnits;
}
void CCamera::MoveAlongUpVec(float fUnits)
{
m_vCameraPosition += m_vUpVector * fUnits;
m_vTargetPosition += m_vUpVector * fUnits;
}
void CCamera::MoveAlongLookVec(float fUnits)
{
m_vCameraPosition += m_vLookVector * fUnits;
m_vTargetPosition += m_vLookVector * fUnits;
}
//旋转操作
void CCamera::RotationRightVec(float fAngle)
{
//生成旋转之后的矩阵
D3DXMATRIX r;
D3DXMatrixRotationAxis(&r, &m_vRightVector, fAngle);
//让m_vUp向量与m_vLook向量绕m_vRight向量旋转fAngle角度
D3DXVec3TransformCoord(&m_vUpVector, &m_vUpVector, &r);
D3DXVec3TransformCoord(&m_vLookVector, &m_vLookVector, &r);
//更新观察点位置
m_vTargetPosition = m_vLookVector * D3DXVec3Length(&m_vCameraPosition);
}
void CCamera::RotationUpVec(float fAngle)
{
//生成旋转之后的矩阵
D3DXMATRIX r;
D3DXMatrixRotationAxis(&r, &m_vUpVector, fAngle);
//让m_vRight向量与m_vLook向量绕m_vUp向量旋转fAngle角度
D3DXVec3TransformCoord(&m_vRightVector, &m_vRightVector, &r);
D3DXVec3TransformCoord(&m_vLookVector, &m_vLookVector, &r);
//更新观察点位置
m_vTargetPosition = m_vLookVector * D3DXVec3Length(&m_vCameraPosition);
}
void CCamera::RotationLookVec(float fAngle)
{
//生成旋转之后的矩阵
D3DXMATRIX r;
D3DXMatrixRotationAxis(&r, &m_vLookVector, fAngle);
//让m_vUp向量与m_vRight向量绕m_vLook向量旋转fAngle角度
D3DXVec3TransformCoord(&m_vUpVector, &m_vUpVector, &r);
D3DXVec3TransformCoord(&m_vRightVector, &m_vRightVector, &r);
//更新观察点位置
m_vTargetPosition = m_vLookVector * D3DXVec3Length(&m_vCameraPosition);
}
在使用之前初始化:
g_pCamera = new CCamera(g_pDevice); g_pCamera->SetCameraPosition(&D3DXVECTOR3(1.0f, 100.0f, -300.0f)); g_pCamera->SetTargetPosition(&D3DXVECTOR3(0.0f, 0.0f, 0.0f)); g_pCamera->SetViewMatrix(); g_pCamera->SetProjectionMartix();
<span style="white-space:pre"> </span>D3DXMATRIX matView; g_pCamera->CalculateViewMatrix(&matView); g_pDevice->SetTransform(D3DTS_VIEW, &matView);
<span style="white-space:pre"> </span>// 沿摄像机各分量移动视角 if (g_pDirectInput->IsKeyDown(DIK_A)) g_pCamera->MoveAlongRightVec(-1.0f); if (g_pDirectInput->IsKeyDown(DIK_D)) g_pCamera->MoveAlongRightVec( 1.0f); if (g_pDirectInput->IsKeyDown(DIK_W)) g_pCamera->MoveAlongLookVec( 1.0f); if (g_pDirectInput->IsKeyDown(DIK_S)) g_pCamera->MoveAlongLookVec(-1.0f); if (g_pDirectInput->IsKeyDown(DIK_I)) g_pCamera->MoveAlongUpVec( 1.0f); if (g_pDirectInput->IsKeyDown(DIK_K)) g_pCamera->MoveAlongUpVec(-1.0f); //沿摄像机各分量旋转视角 if (g_pDirectInput->IsKeyDown(DIK_LEFT)) g_pCamera->RotationUpVec(-0.003f); if (g_pDirectInput->IsKeyDown(DIK_RIGHT)) g_pCamera->RotationUpVec( 0.003f); if (g_pDirectInput->IsKeyDown(DIK_UP)) g_pCamera->RotationRightVec(-0.003f); if (g_pDirectInput->IsKeyDown(DIK_DOWN)) g_pCamera->RotationRightVec( 0.003f); if (g_pDirectInput->IsKeyDown(DIK_J)) g_pCamera->RotationLookVec(-0.001f); if (g_pDirectInput->IsKeyDown(DIK_L)) g_pCamera->RotationLookVec( 0.001f);
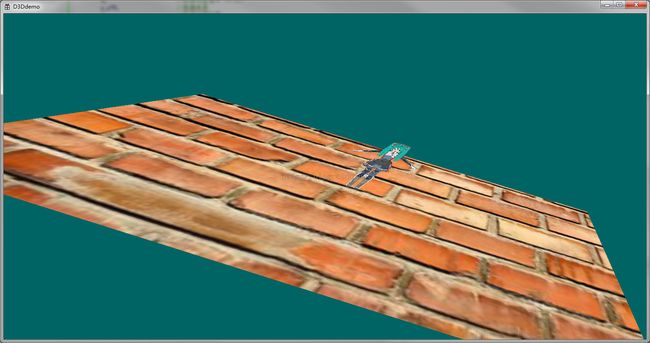
三.例子
终于完成啦!搞进去几个模型(从浅墨大大那里偷得,大大不要打我....)

// D3DDemo.cpp : 定义应用程序的入口点。
//
#include "stdafx.h"
#include "D3DDemo.h"
#include "DirectInput.h"
#include "Camera.h"
#define MAX_LOADSTRING 100
// 全局变量:
HINSTANCE hInst; // 当前实例
TCHAR szTitle[MAX_LOADSTRING]; // 标题栏文本
TCHAR szWindowClass[MAX_LOADSTRING]; // 主窗口类名
// 此代码模块中包含的函数的前向声明:
HWND g_hWnd;
ATOM MyRegisterClass(HINSTANCE hInstance);
BOOL InitInstance(HINSTANCE, int);
LRESULT CALLBACK WndProc(HWND, UINT, WPARAM, LPARAM);
//---------改造3D窗口需要的内容------------
LPDIRECT3D9 g_pD3D = NULL; //D3D接口指针
LPDIRECT3DDEVICE9 g_pDevice = NULL; //D3D设备指针
CDirectInput* g_pDirectInput = NULL; //控制指针
CCamera* g_pCamera = NULL; //摄像机指针
//创建网格对象所需内容
LPD3DXMESH g_pMesh = NULL; //网格对象
LPDIRECT3DTEXTURE9* g_pTextures = NULL; //网格纹理信息
D3DMATERIAL9* g_pMaterials = NULL; //网格材质信息
DWORD g_dwNumMtrls = 0; //网格材质数目
LPDIRECT3DTEXTURE9 g_pGroundTexture = NULL; //地面纹理
//------------绘制图形步骤1.定义灵活顶点格式
#define D3DFVF_CUSTOMVERTEX (D3DFVF_XYZ|D3DFVF_TEX1)//坐标为经过变换的屏幕坐标,顶点的颜色
//------------绘制图形步骤2.根据上面定义的顶点格式,创建一个顶点的结构体
struct stVertex
{
float _x, _y, _z; //位置坐标
float _u, _v; //纹理坐标
stVertex(float x, float y, float z, float u, float v) : _x(x), _y(y), _z(z), _u(u), _v(v){}
stVertex(){}
};
//----------绘制图形步骤3.声明一个顶点缓冲区指针&一个索引缓冲区指针
LPDIRECT3DVERTEXBUFFER9 g_pVB = NULL;
LPDIRECT3DINDEXBUFFER9 g_pIB = NULL;
//初始化顶点缓冲区
void initVB()
{
//----------绘制图形步骤4.定义一个结构体数组用来给每个顶点赋值
//数组中存储当前程序中顶点的数据
stVertex vertex[4];
// 正面顶点数据
vertex[0] = stVertex(-500.0f, 0.0f, -500.0f, 0.0f, 1.0f);
vertex[1] = stVertex(-500.0f, 0.0f, 500.0f, 0.0f, 0.0f);
vertex[2] = stVertex( 500.0f, 0.0f, -500.0f, 1.0f, 1.0f);
vertex[3] = stVertex( 500.0f, 0.0f, 500.0f, 1.0f, 0.0f);
//----------绘制图形步骤5.为定点缓冲区分配内存,并将数组中的顶点值拷贝到顶点缓冲区中
//通过设备指针来创建顶点缓冲区,用来存储顶点数据
g_pDevice->CreateVertexBuffer(
sizeof(vertex), //顶点缓冲区大小
D3DUSAGE_WRITEONLY, //顶点缓冲区作用
D3DFVF_CUSTOMVERTEX, //通知系统顶点格式
D3DPOOL_MANAGED, //顶点缓冲区存储位置,此处表示由系统处理
&g_pVB, //返回顶点缓冲区指针
NULL //系统保留参数,NULL
);
void* pVertices = NULL;
//锁定顶点缓冲区,向其中拷贝数据
g_pVB->Lock(
0, //锁定的偏移量
sizeof(vertex), //锁定的大小
&pVertices, //锁定之后存储空间
0 //锁定的标识,0
);
//将数组中的内容拷贝到缓冲区中
memcpy(pVertices, vertex, sizeof(vertex));
//解锁
g_pVB->Unlock();
//创建纹理
D3DXCreateTextureFromFile(g_pDevice, TEXT("texture.png"), &g_pGroundTexture);
}
void onCreatD3D()
{
g_pD3D = Direct3DCreate9(D3D_SDK_VERSION);
if (!g_pD3D)
return;
//检测硬件设备能力的方法
/*D3DCAPS9 caps;
ZeroMemory(&caps, sizeof(caps));
g_pD3D->GetDeviceCaps(D3DADAPTER_DEFAULT, D3DDEVTYPE_HAL, &caps);*/
//获得相关信息,屏幕大小,像素点属性
D3DDISPLAYMODE d3ddm;
ZeroMemory(&d3ddm, sizeof(d3ddm));
g_pD3D->GetAdapterDisplayMode(D3DADAPTER_DEFAULT, &d3ddm);
//设置全屏模式
D3DPRESENT_PARAMETERS d3dpp;
ZeroMemory(&d3dpp, sizeof(d3dpp));
/*d3dpp.Windowed = false;
d3dpp.BackBufferWidth = d3ddm.Width;
d3dpp.BackBufferHeight = d3ddm.Height;*/
d3dpp.Windowed = true;
d3dpp.BackBufferFormat = d3ddm.Format;
d3dpp.BackBufferCount = 1;
d3dpp.SwapEffect = D3DSWAPEFFECT_DISCARD;//交换后原缓冲区数据丢弃
//是否开启自动深度模板缓冲
d3dpp.EnableAutoDepthStencil = true;
//当前自动深度模板缓冲的格式
d3dpp.AutoDepthStencilFormat = D3DFMT_D16;//每个像素点有16位的存储空间,存储离摄像机的距离
g_pD3D->CreateDevice(D3DADAPTER_DEFAULT, D3DDEVTYPE_HAL, g_hWnd, D3DCREATE_SOFTWARE_VERTEXPROCESSING, &d3dpp, &g_pDevice);
if (!g_pDevice)
return;
//设置渲染状态,设置启用深度值
g_pDevice->SetRenderState(D3DRS_ZENABLE, true);
//设置渲染状态,关闭灯光
g_pDevice->SetRenderState(D3DRS_LIGHTING, false);
//设置渲染状态,裁剪模式
g_pDevice->SetRenderState(D3DRS_CULLMODE, D3DCULL_NONE);
//g_pDevice->SetRenderState(D3DRS_CULLMODE, D3DCULL_NONE) ;
}
void CreateMesh()
{
LPD3DXBUFFER pAdjBuffer = NULL;
LPD3DXBUFFER pMtrlBuffer = NULL;
D3DXLoadMeshFromX(TEXT("miki.X"), D3DXMESH_MANAGED, g_pDevice, &pAdjBuffer, &pMtrlBuffer, NULL, &g_dwNumMtrls, &g_pMesh);
//读取材质和纹理数据
D3DXMATERIAL *pMtrl = (D3DXMATERIAL*)pMtrlBuffer->GetBufferPointer();
g_pMaterials = new D3DMATERIAL9[g_dwNumMtrls];
g_pTextures = new LPDIRECT3DTEXTURE9[g_dwNumMtrls];
for (int i = 0; i < g_dwNumMtrls; i++)
{
g_pMaterials[i] = pMtrl[i].MatD3D;
g_pMaterials[i].Ambient = g_pMaterials[i].Diffuse;
g_pTextures[i] = NULL;
D3DXCreateTextureFromFileA(g_pDevice, pMtrl[i].pTextureFilename, &g_pTextures[i]);
}
SAFE_RELEASE(pAdjBuffer);
SAFE_RELEASE(pMtrlBuffer);
}
void CreateCamera()
{
g_pCamera = new CCamera(g_pDevice);
g_pCamera->SetCameraPosition(&D3DXVECTOR3(1.0f, 100.0f, -300.0f));
g_pCamera->SetTargetPosition(&D3DXVECTOR3(0.0f, 0.0f, 0.0f));
g_pCamera->SetViewMatrix();
g_pCamera->SetProjectionMartix();
}
void onInit()
{
//初始化D3D
onCreatD3D();
//初始化顶点缓冲区
initVB();
//创建Mesh模型
CreateMesh();
//创建摄像机
CreateCamera();
}
void onDestroy()
{
if (!g_pDevice)
g_pDevice->Release();
g_pDevice = NULL;
}
void onLogic(float fElapsedTime)
{
//使用DirectInput类读取数据
g_pDirectInput->GetInput();
// 沿摄像机各分量移动视角
if (g_pDirectInput->IsKeyDown(DIK_A)) g_pCamera->MoveAlongRightVec(-1.0f);
if (g_pDirectInput->IsKeyDown(DIK_D)) g_pCamera->MoveAlongRightVec( 1.0f);
if (g_pDirectInput->IsKeyDown(DIK_W)) g_pCamera->MoveAlongLookVec( 1.0f);
if (g_pDirectInput->IsKeyDown(DIK_S)) g_pCamera->MoveAlongLookVec(-1.0f);
if (g_pDirectInput->IsKeyDown(DIK_I)) g_pCamera->MoveAlongUpVec( 1.0f);
if (g_pDirectInput->IsKeyDown(DIK_K)) g_pCamera->MoveAlongUpVec(-1.0f);
//沿摄像机各分量旋转视角
if (g_pDirectInput->IsKeyDown(DIK_LEFT)) g_pCamera->RotationUpVec(-0.003f);
if (g_pDirectInput->IsKeyDown(DIK_RIGHT)) g_pCamera->RotationUpVec( 0.003f);
if (g_pDirectInput->IsKeyDown(DIK_UP)) g_pCamera->RotationRightVec(-0.003f);
if (g_pDirectInput->IsKeyDown(DIK_DOWN)) g_pCamera->RotationRightVec( 0.003f);
if (g_pDirectInput->IsKeyDown(DIK_J)) g_pCamera->RotationLookVec(-0.001f);
if (g_pDirectInput->IsKeyDown(DIK_L)) g_pCamera->RotationLookVec( 0.001f);
//鼠标控制右向量和上向量的旋转
g_pCamera->RotationUpVec(g_pDirectInput->MouseDX()* 0.001f);
g_pCamera->RotationRightVec(g_pDirectInput->MouseDY() * 0.001f);
//鼠标滚轮控制观察点收缩操作
static FLOAT fPosZ=0.0f;
fPosZ += g_pDirectInput->MouseDZ()*0.03f;
//计算并设置取景变换矩阵
D3DXMATRIX matView;
g_pCamera->CalculateViewMatrix(&matView);
g_pDevice->SetTransform(D3DTS_VIEW, &matView);
//把正确的世界变换矩阵存到g_matWorld中
//D3DXMatrixTranslation(&g_matWorld, 0.0f, 0.0f, fPosZ);
}
void Transform()
{
//WorldTransform:世界变换
D3DXMATRIXA16 matWorld;
D3DXMATRIXA16 matScaling;
//生成缩放矩阵
D3DXMatrixScaling(&matScaling, 0.8f, 0.8f, 0.8f);
//生成绕Y轴旋转矩阵,存储于矩阵中
D3DXMatrixRotationY(
&matWorld, //输出矩阵
10.0f //角度
);
matWorld = matScaling * matWorld;
g_pDevice->SetTransform(D3DTS_WORLD, &matWorld);
//ViewTransform:取景变换
D3DXVECTOR3 vEyePt(0.0f, 0.0f, -500.0f); //摄像机世界坐标
D3DXVECTOR3 vLookatPt(0.0f, 0.0f, 0.0f); //观察点世界坐标
D3DXVECTOR3 vUpVec(0.0f, 1.0f, 0.0f); //摄像机的上向量,通常为(0.0f, 1.0f, 0.0f)
D3DXMATRIXA16 matView; //View变换的矩阵
//根据上面的结果计算出矩阵,存入矩阵中
D3DXMatrixLookAtLH(&matView, &vEyePt, &vLookatPt, &vUpVec);
//进行取景变换
g_pDevice->SetTransform(D3DTS_VIEW, &matView);
//ProjectionTransform:投影变换
D3DXMATRIXA16 matProj; //投影变换矩阵
//生成投影变换矩阵,存入上面的矩阵中
D3DXMatrixPerspectiveFovLH(
&matProj, //输出结果矩阵
D3DX_PI / 4, //视域角度,一般为PI/4
1.0f, //显示屏的长宽比
1.0f, //视截体中近截面距离摄像机的位置
1000.0f //视截体中远截面距离摄像机的位置
);
//进行投影变换
g_pDevice->SetTransform(D3DTS_PROJECTION, &matProj);
}
void onRender(float fElasedTime)
{
//前两个参数是0和NULL时,清空整个游戏窗口的内容(清的是后台)
//第三个是清除的对象:前面表示清除颜色缓冲区,后面表示清除深度缓冲区,D3DCLEAR_STENCIL清空模板缓冲区
g_pDevice->Clear(0, NULL, D3DCLEAR_TARGET|D3DCLEAR_ZBUFFER, D3DCOLOR_XRGB(0,100,100), 1.0f, 0);
g_pDevice->BeginScene();
//Transform();
////----------绘制图形步骤6.设置数据源,设置灵活顶点格式,绘制图元
//设置数据流来源
g_pDevice->SetStreamSource(
0, //数据流管道号(0-15)
g_pVB, //数据来源
0, //数据流偏移量
sizeof(stVertex) //每个数据的字节数大小
);
//通知系统数据格式,以便解析数据
g_pDevice->SetFVF(D3DFVF_CUSTOMVERTEX);
D3DXMATRIX matWorld;
D3DXMatrixTranslation(&matWorld, 0.0f, 0.0f, 200.0f);
g_pDevice->SetTransform(D3DTS_WORLD, &matWorld);
g_pDevice->SetTexture(0, g_pGroundTexture);
//绘制图元
g_pDevice->DrawPrimitive(
D3DPT_TRIANGLESTRIP, //三角形列
0, //起始点编号
2 //图元数量
);
D3DXMATRIX matWorld1;
D3DXMatrixTranslation(&matWorld1, 0.0f, 100.0f, 200.0f);
g_pDevice->SetTransform(D3DTS_WORLD, &matWorld1);
for (int i = 0; i < g_dwNumMtrls; i++)
{
g_pDevice->SetMaterial(&g_pMaterials[i]);
g_pDevice->SetTexture(0, g_pTextures[i]);
g_pMesh->DrawSubset(i);
}
g_pDevice->EndScene();
g_pDevice->Present(NULL, NULL, NULL, NULL);
}
int APIENTRY _tWinMain(_In_ HINSTANCE hInstance,
_In_opt_ HINSTANCE hPrevInstance,
_In_ LPTSTR lpCmdLine,
_In_ int nCmdShow)
{
UNREFERENCED_PARAMETER(hPrevInstance);
UNREFERENCED_PARAMETER(lpCmdLine);
// TODO: 在此放置代码。
MSG msg;
HACCEL hAccelTable;
// 初始化全局字符串
LoadString(hInstance, IDS_APP_TITLE, szTitle, MAX_LOADSTRING);
LoadString(hInstance, IDC_D3DDEMO, szWindowClass, MAX_LOADSTRING);
MyRegisterClass(hInstance);
// 执行应用程序初始化:
if (!InitInstance (hInstance, nCmdShow))
{
return FALSE;
}
hAccelTable = LoadAccelerators(hInstance, MAKEINTRESOURCE(IDC_D3DDEMO));
ZeroMemory(&msg, sizeof(msg));
while (msg.message != WM_QUIT)
{
if (PeekMessage(&msg, NULL, 0, 0, PM_REMOVE))
{
TranslateMessage(&msg);
DispatchMessage(&msg);
}
else
{
static DWORD dwTime = timeGetTime();
DWORD dwCurrentTime = timeGetTime();
DWORD dwElapsedTime = dwCurrentTime - dwTime;
float fElapsedTime = dwElapsedTime * 0.001f;
//------------渲染和逻辑部分代码----------
onLogic(fElapsedTime);
onRender(fElapsedTime);
//-----------------------------------------
if (dwElapsedTime < 1000 / 60)
{
Sleep(1000/ 60 - dwElapsedTime);
}
dwTime = dwCurrentTime;
}
}
onDestroy();
return (int) msg.wParam;
}
//
// 函数: MyRegisterClass()
//
// 目的: 注册窗口类。
//
ATOM MyRegisterClass(HINSTANCE hInstance)
{
WNDCLASSEX wcex;
wcex.cbSize = sizeof(WNDCLASSEX);
wcex.style = CS_HREDRAW | CS_VREDRAW;
wcex.lpfnWndProc = WndProc;
wcex.cbClsExtra = 0;
wcex.cbWndExtra = 0;
wcex.hInstance = hInstance;
wcex.hIcon = LoadIcon(hInstance, MAKEINTRESOURCE(IDI_D3DDEMO));
wcex.hCursor = LoadCursor(NULL, IDC_ARROW);
wcex.hbrBackground = (HBRUSH)(COLOR_WINDOW+1);
wcex.lpszMenuName = MAKEINTRESOURCE(IDC_D3DDEMO);
wcex.lpszClassName = szWindowClass;
wcex.hIconSm = LoadIcon(wcex.hInstance, MAKEINTRESOURCE(IDI_SMALL));
return RegisterClassEx(&wcex);
}
//
// 函数: InitInstance(HINSTANCE, int)
//
// 目的: 保存实例句柄并创建主窗口
//
// 注释:
//
// 在此函数中,我们在全局变量中保存实例句柄并
// 创建和显示主程序窗口。
//
BOOL InitInstance(HINSTANCE hInstance, int nCmdShow)
{
hInst = hInstance; // 将实例句柄存储在全局变量中
g_hWnd = CreateWindow(szWindowClass, szTitle, WS_OVERLAPPEDWINDOW,
CW_USEDEFAULT, 0, CW_USEDEFAULT, 0, NULL, NULL, hInstance, NULL);
if (!g_hWnd)
{
return FALSE;
}
//初始化DirectInput类
g_pDirectInput = new CDirectInput();
g_pDirectInput->Init(g_hWnd, hInst, DISCL_FOREGROUND|DISCL_NONEXCLUSIVE, DISCL_FOREGROUND|DISCL_NONEXCLUSIVE);
SetMenu(g_hWnd, NULL);
ShowWindow(g_hWnd, nCmdShow);
UpdateWindow(g_hWnd);
onInit();
return TRUE;
}
//
// 函数: WndProc(HWND, UINT, WPARAM, LPARAM)
//
// 目的: 处理主窗口的消息。
//
// WM_COMMAND - 处理应用程序菜单
// WM_PAINT - 绘制主窗口
// WM_DESTROY - 发送退出消息并返回
//
//
LRESULT CALLBACK WndProc(HWND g_hWnd, UINT message, WPARAM wParam, LPARAM lParam)
{
switch (message)
{
case WM_KEYDOWN:
if (wParam == VK_ESCAPE)
PostQuitMessage(0);
break;
case WM_CLOSE:
DestroyWindow(g_hWnd);
break;
case WM_DESTROY:
PostQuitMessage(0);
break;
default:
return DefWindowProc(g_hWnd, message, wParam, lParam);
}
return 0;
}
从摄像机roll,yaw,pitch的示意图中,我们看到并不是说 roll:就是绕x轴,yaw就是绕y轴,pitch就是绕z轴。
比如一般情况下,摄像机的镜头朝向一般都被定为z轴。
那到底是怎么回事呢?
我目测要从roll,yaw,pitch,这三个词的含义来看。
roll: vt. 卷;滚动,转动;辗
yaw: v.(火箭、飞机、宇宙飞船等)偏航
pitch:vi. 倾斜;投掷;搭帐篷;坠落
为了不再将这三个词和x,y,z牵扯起来,我们只使用描述性的语言。
roll的意思是翻滚,中文中飞机的翻滚是什么,就是绕着机身所在的那个轴。
yaw:是偏航的意思,如果要改变航向,飞机必定是绕着重力方向为轴。
pitch:有倾斜、坠落的意思。飞机在坠落时,必定会一头栽下去,以翅膀所在的直线为轴。
现在把摄像机看成一个飞机,镜头朝向就是飞机头的朝向,是不是一样?