Mission PLanner地面站构架分析之MAVLINK航点读写
转载请注明出处:http://www.amovauto.com 阿木社区 玩也要玩的专业!
3DR这个地面站还是非常专业的,最近研究MAVLINK通信协议,就来分析下Mission planner的构架。至于Msission planner的编译在前面几篇文章已经做了详细描述。
Msission planner有几十个工程项目组成
AviFile
BaseClasses
BSE.Windows.Forms
Core
GeoUtility
GMap.Net.Core
GMap.Net.WindowsForms
KMLib
MAVLink
MetaDataExtractor
MissionPlanner.Comms
MissionPlanner.Controls
MissionPlanner.Utils
px4uploader
SharpKml
ZedGraph
几十个工程的调用关系比较复杂,有些库的使用价值非常高的比如MAVLink,用这个库就可以搞定所有的MAVLINK协议方面的事情,我也是从这个库着手写的地面站,可以重点看看这个库。
Mission Planner的构架比较复杂,他的功能太全了,所以显得冗余。但是非常专业的地面站,我喜欢........
一 入口函数分析,入口函数在Program.cs中在入口函数中初始化了一堆东西 GMAP等等.......
一直到这里
try
{
//System.Diagnostics.Process.GetCurrentProcess().PriorityClass = System.Diagnostics.ProcessPriorityClass.RealTime;
Thread.CurrentThread.Name = "Base Thread";
Application.Run(new MainV2());
}
catch (Exception ex)
{
log.Fatal("Fatal app exception", ex);
Console.WriteLine(ex.ToString());
Console.WriteLine("\nPress any key to exit!");
Console.ReadLine();
}
他启动了主窗体MainV2,这个主窗体就是要分析的重点了,因为我们的第一步目的是分析MAVLINK的这个协议的使用,其他的一些软件窗体方面的设置,我们先不考虑。
log.Info("Create FD");
FlightData = new GCSViews.FlightData();//
log.Info("Create FP");
FlightPlanner = new GCSViews.FlightPlanner();
//Configuration = new GCSViews.ConfigurationView.Setup();
log.Info("Create SIM");
Simulation = new GCSViews.Simulation();
GCSViews是重要的一个类,这个就是MP的控件类,其中
可以看到FlightData.cs是飞行数据显示界面,就是MP中的姿态数据显示界面,FlightPlanner.cs是飞行计划设置界面,读取航点和写入航点都在这个界面里面,前面的消息解析中我们已经知道怎么怎么通过MAVLNK读取APM的飞控的数据了,下一步我们要实现航点的读取和写入,我们来重点分析下这个FlightPlanner.cs。
飞行计划设置界面
电机读取航点按钮,进入实现函数;
internal void BUT_read_Click(object sender, EventArgs e)
{
if (Commands.Rows.Count > 0)
{
if (sender is FlightData)
{
}
else
{
if (
CustomMessageBox.Show("This will clear your existing planned mission, Continue?", "Confirm",
MessageBoxButtons.OKCancel) != DialogResult.OK)
{
return;
}
}
}
ProgressReporterDialogue frmProgressReporter = new ProgressReporterDialogue
{
StartPosition = FormStartPosition.CenterScreen,
Text = "Receiving WP's"
};
frmProgressReporter.DoWork += getWPs;//获取航点的委托
frmProgressReporter.UpdateProgressAndStatus(-1, "Receiving WP's");
ThemeManager.ApplyThemeTo(frmProgressReporter);
frmProgressReporter.RunBackgroundOperationAsync();
frmProgressReporter.Dispose();
}
void getWPs(object sender, ProgressWorkerEventArgs e, object passdata = null)
{
List cmds = new List();
try
{
MAVLinkInterface port = MainV2.comPort;
if (!port.BaseStream.IsOpen)
{
throw new Exception("Please Connect First!");
}
MainV2.comPort.giveComport = true;
param = port.MAV.param;
log.Info("Getting Home");
((ProgressReporterDialogue) sender).UpdateProgressAndStatus(0, "Getting WP count");
if (port.MAV.apname == MAVLink.MAV_AUTOPILOT.PX4)
{
try
{
cmds.Add(port.getHomePosition());
}
catch (TimeoutException ex)
{
// blank home
cmds.Add(new Locationwp() { id = (byte)MAVLink.MAV_CMD.WAYPOINT });
}
}
log.Info("Getting WP #");
int cmdcount = port.getWPCount();
for (ushort a = 0; a < cmdcount; a++)
{
if (((ProgressReporterDialogue) sender).doWorkArgs.CancelRequested)
{
((ProgressReporterDialogue) sender).doWorkArgs.CancelAcknowledged = true;
throw new Exception("Cancel Requested");
}
log.Info("Getting WP" + a);
((ProgressReporterDialogue) sender).UpdateProgressAndStatus(a*100/cmdcount, "Getting WP " + a);
cmds.Add(port.getWP(a));
}
port.setWPACK();
((ProgressReporterDialogue) sender).UpdateProgressAndStatus(100, "Done");
log.Info("Done");
}
catch
{
throw;
}
WPtoScreen(cmds);
}
ProgressReporterDialogue这个对话框类中DoWork是个委托,ProgressReporterDialogue的后台运行线程会执行 getWPs(object sender, ProgressWorkerEventArgs e, object passdata = null)这个委托,来看看这个委托
委托里面定义了 List cmds = new List();航点列表。
MAVLinkInterface port = MainV2.comPort;这个MAVLinkInterface类比较重要,是主界面MainV2的一个成员变量。里面记录了关于MAVLINK协议的所有内容,从MAVLINK协议获取的参数会存入这个成员变量,比如飞控是什么固件,飞控的状态,还有对LIB库里面的MAVLINK库的进一步封装比如得到心跳包函数getHeartBeat(),得到参数列表getParaList(),得到当前航点getRallyPoints();
看来这个成员可以实现所有 MAVLINK的操作,结构图如下:
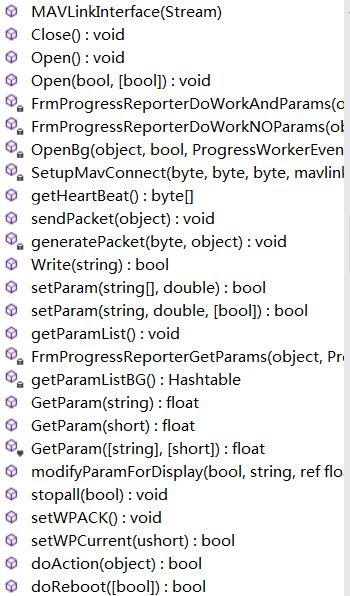
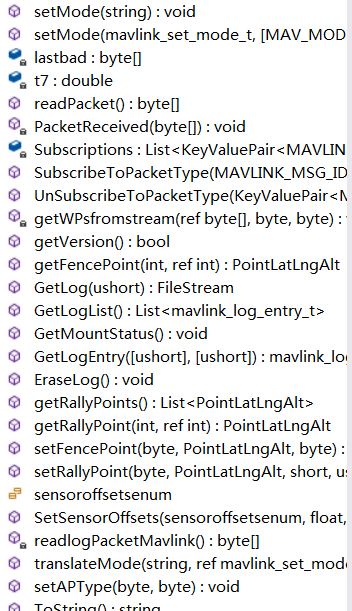 以上可以看到 MAVLinkInterface的一些接口,再看读取航点的函数:
以上可以看到 MAVLinkInterface的一些接口,再看读取航点的函数:
int cmdcount = port.getWPCount();得到航点个数
cmds.Add(port.getWP(a));存入航点坐标到航点列表,可以在MAVLinkInterface类中看到详细的getWP(a)得到航点的实现,用while循环读取,并且做了超时时间设置,来保证软件健壮性。
MP里面还有个航点类来接收航点在locationwp.cs中可以看到详细的定义,主要是坐标,姿态,和这个航点的command id指令ID。
我们知道了怎么利用mavlink读取航点,那么如果我们要写入航点,也是一样的道理。
更多内容请访问:http://www.amovauto.com 阿木社区 玩也要玩的专业!
QQ群:526221258