自平衡机器人DIY(三)
自平衡机器人DIY(二)中,小车已经基本可以站立了。因为过年期间马云家都不发货,所以就做了一些调整参数的工作。昨天usb转ttl模块终于到货了,今天下午主要研究了一下通过usb转ttl设置蓝牙模块的问题。
刚开始出现了和之前一样的问题,无法打开串口:(串口不存在或被其他应用程序占用)
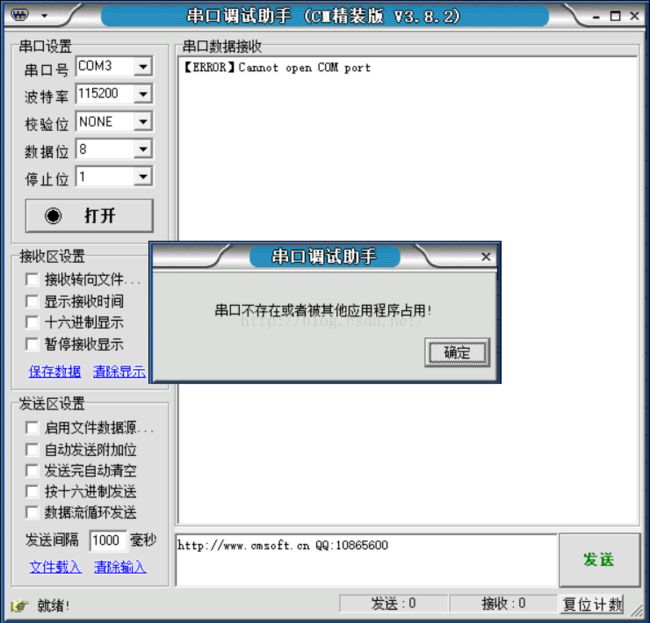
这个问题困扰了我好久。后来百度发现,win8.1居然不支持这个PL2303HX的usb转ttl!!!(效果就是在计算机-管理-设备管理器-端口这一栏中,设备名称前有一个黄色的感叹号,点进去会说:设备不在正常工作,错误代码10)

难道宝宝还要再买一个最新版的小板子??周一就要开组会汇报了呀。。。真是神烦
不过运气还不错,我百度了一下,遇到这个问题的人还不少:大神们说,2009版的老版本的驱动可以在win8.1上正常工作。真是抓住了救命稻草!可是我搜来搜去就是找不到09年的驱动(哭笑不得)
不过根据那些教程所说的方法,从端口下的Prolific-USB-to-Serial Comm Port---属性---更新驱动程序,然后手动选取驱动,我看到了一个2011年版的:
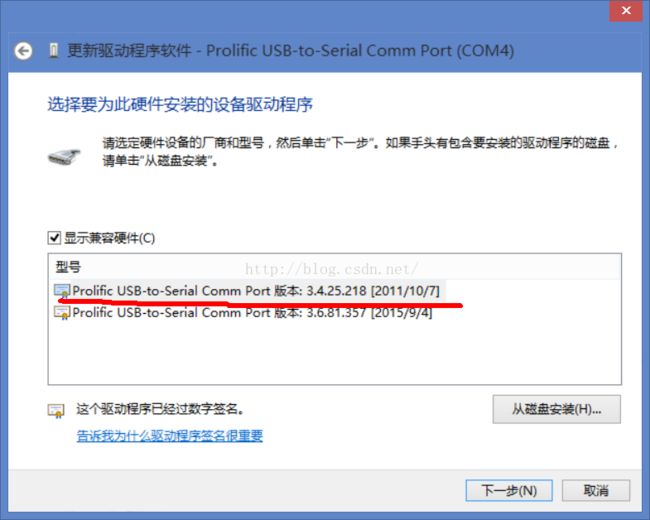
既然也是老版本那就试一试好了。。。
——没想到一试就成功了!真是愉快!
接着连接蓝牙和pl2303, VCC接VCC,GND接GND,TX接RX,RX接TX,就可以使用串口调试软件给蓝牙模块发送AT指令了~ 改个好听的名字,设置波特率为115200就OK了
因为接下来要用手机蓝牙连接小车进行遥控,所以我找了一款不错的Android APP:

可以手动发送命令和蓝牙模块通讯,它还支持6个自定义的按键来快捷发送命令,比如可以设置前进、后退、转向等等,应该是非常方便的。上面还有滑块可以调节PID参数,简直方便到不行233.(虽然我还不知道怎么用)
接下来的工作就是把这个蓝牙通讯的程序调试好,争取早日实现小车的遥控!![]()
![]()
![]()