(ros:robot operating system)cob_simulation報錯
cob_simulation報錯
按照官網說明 http://wiki.ros.org/cob_bringup_sim
1. git clone https://github.com/ipa320/cob_simulation.git
2. 然後將cob_simulation package放入catking工作空間
3. 編譯
4. 運行
出現錯誤:
while processing /home/wsh/bzrobot_ws/src/cob_environments/cob_hardware_config/common/upload_robot.launch:
Invalid <param> tag: Cannot load command parameter [robot_description]: command [/opt/ros/indigo/share/xacro/xacro.py '/home/wsh/bzrobot_ws/src/cob_environments/cob_hardware_config/cob3-1/urdf/cob3-1.urdf.xacro'] returned with code [1].
Param xml is <param command="$(find xacro)/xacro.py '$(arg pkg_hardware_config)/$(arg robot)/urdf/$(arg robot).urdf.xacro'" name="robot_description"/>
The traceback for the exception was written to the log file
然後發現有這樣一段話:
1. Software Requirements
Make sure that you have the cob_simulation stack installed on your system.
確保cob_simulation已經安裝,我以爲編譯好就叫安裝。
然後我安裝了(http://wiki.ros.org/Robots/Care-O-bot/electric),我是indigo版本:
發現系統裏面出現了環境變量的幾個包。
環境變量不要忘記設置:
然後:
依舊數顯上面的錯誤。
正確的方法是先設置環境變量,然後運行:
按照官網說明 http://wiki.ros.org/cob_bringup_sim
1. git clone https://github.com/ipa320/cob_simulation.git
2. 然後將cob_simulation package放入catking工作空間
3. 編譯
4. 運行
export ROBOT=cob4-2 export ROBOT_ENV=ipa-apartment roslaunch cob_bringup_sim robot.launch
出現錯誤:
while processing /home/wsh/bzrobot_ws/src/cob_environments/cob_hardware_config/common/upload_robot.launch:
Invalid <param> tag: Cannot load command parameter [robot_description]: command [/opt/ros/indigo/share/xacro/xacro.py '/home/wsh/bzrobot_ws/src/cob_environments/cob_hardware_config/cob3-1/urdf/cob3-1.urdf.xacro'] returned with code [1].
Param xml is <param command="$(find xacro)/xacro.py '$(arg pkg_hardware_config)/$(arg robot)/urdf/$(arg robot).urdf.xacro'" name="robot_description"/>
The traceback for the exception was written to the log file
然後發現有這樣一段話:
1. Software Requirements
Make sure that you have the cob_simulation stack installed on your system.
確保cob_simulation已經安裝,我以爲編譯好就叫安裝。
然後我安裝了(http://wiki.ros.org/Robots/Care-O-bot/electric),我是indigo版本:
sudo apt-get install ros-indigo-care-o-bot
發現系統裏面出現了環境變量的幾個包。
環境變量不要忘記設置:
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
. ~/.bashrc
source /opt/ros/indigo/setup.bash
然後:
roslaunch cob_bringup_sim robot.launch
依舊數顯上面的錯誤。
正確的方法是先設置環境變量,然後運行:
export ROBOT=cob4-2
export ROBOT_ENV=ipa-apartment
roslaunch cob_bringup_sim robot.launch
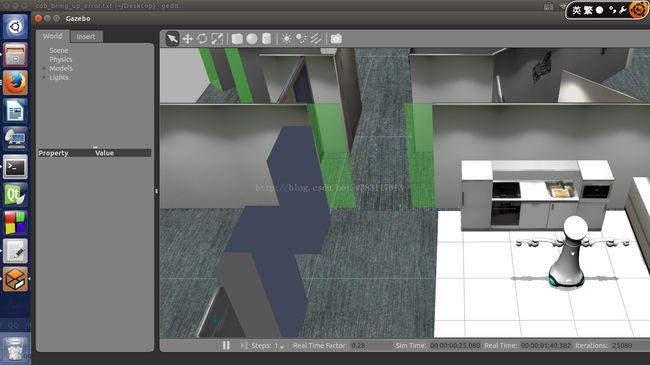
![]()
欢迎大家批评,指正,交流!
联系方式:
emai: [email protected]