Ubuntu ROS Arduino Gazebo学习镜像iso说明(indigo版)
Ubuntu ROS ArduinoGazebo学习镜像iso说明indigo版
系统用于ROS爱好者学习交流,特别感谢Exbot开源机器人社区提供的帮助。
安装测试内存推荐4GB以上,2GB以下可能出现问题。
系统安装了基本使用的软件,搜狗输入法,SMPlayer,Tweak等,
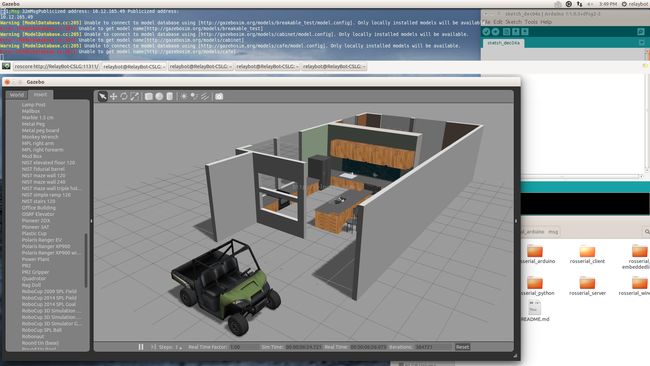
机器人软件有Gazebo,已经加载必要的模型库,避免由于网络问题出现空地图的情况;
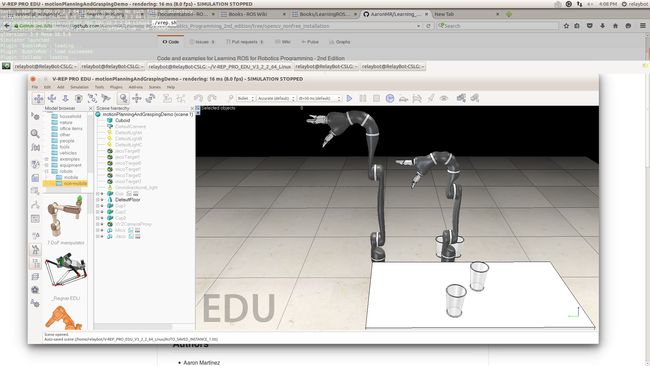
V-REP的EDU版本,安装ROSBy Example和LearningROS for Robotics Programming - Second Edition所有的库,
包括OpenCVnon-free等库。镜像中所有软件以及资料的版权属于原作者。
http://wiki.ros.org/

-Gazebo-
--$ gazebo
-Arduino-
--$ rosrunrosserial_python serial_node.py /dev/ttyUSB0
--$ rostopic echochatter
具体教程推荐参考:
http://wiki.ros.org/rosserial_arduino/Tutorials
-ROS By Example-
例子都已编译过,在/home/relaybot/catkin_ws/src
具体可以参考:
https://github.com/pirobot/rbx1/tree/indigo-devel
https://github.com/pirobot/rbx2/tree/indigo-devel
-Learning ROS forRobotics Programming - Second Edition-
例子都已编译过,在/home/relaybot/catkin_ws/src
具体可以参考:
https://github.com/AaronMR/Learning_ROS_for_Robotics_Programming_2nd_edition/tree/opencv_nonfree_installation
-V-Rep-
--$ cdV-REP_PRO_EDU_V3_2_2_64_Linux
--$ ./vrep.sh
如果需要配置ROS与V-Rep接口,请参考:
http://blog.csdn.net/zhangrelay/article/details/49401881
-cob_people_perception-
请参考:
http://blog.csdn.net/zhangrelay/article/details/50053733
-rplidar_ros_slam-
请参考:
http://blog.csdn.net/zhangrelay/article/details/49961839

点击下面
资源下载链接