静态数组表示的有限状态机
2013-07-13 16:18
745人阅读
评论(1)
收藏
举报
前段时间搞无状态的TCP conntrack,发现其中一个静态数组表示的TCP状态机很是不错,希望这种思想以后可以用在实际的工作中,直说吧,就是这个状态机数组:
以下是状态机转换公式:
new_state = tcp_conntracks[dir][index][old_state];
上述公式中,dir就是IP_CT_DIR_REPLY或者IP_CT_DIR_ORIGINAL,index其实就是事件。初看,就可以看出这个要比一个while循环实现的状态机,原因就在于状态机完全数据化了,而不是常规的那样用代码逻辑if state-if event或者switch-case等硬编码完成的。在这个数组填充的时候,那些if state-if event等判断就已经做好了,数组填充完成了,直接拿来用就是了。
实际上,在Linux内核中,这样的实现还不止conntrack一个,IPVS也是一个很好的例子,net/netfilter/ipvs/ip_vs_proto_tcp.c:
可见和ip_conntrack的极其类似!这种数组所包含的信息量极大,几乎把索引下标,数组维数全部都用来存储数据了,这样就形成了一个多维的存储结构,一旦两个维度的信息不再正交,那么数组元素本身它就有了状态,而这正是实现状态机的关键。
填充过程很简单,公式如下:
StateMachine[Event][OldSate]=NewState;
为此,我们先定义一套数据,将State和Event数据化:
我们定义一个二维数组,第一维代表事件,第二维的值代表下一个状态第二维的索引,其实就是下面的公式
NewState=StateMachine[Event][OldState];
按照上面的填充规则,终于,我们得到了下面的这个数组:
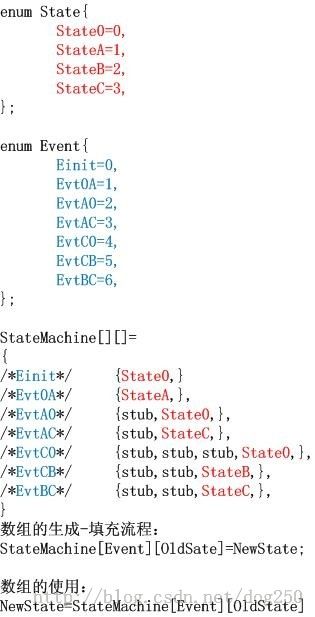
其中的stub表示该处不表示任何状态。
if (match0) {
do_something0;
} elif (match1) {
do_something1;
} elif (match2) {
do_something2;
}
但凡可以用这种方式表示的逻辑,都可以用一个多维数组来表示。常见的如BPF或者其它的过滤机制,本质上也是一些叠加判断:
if (match0 && match1 && match2 && match 3 && ...) {
return TRUE;
} else {
return FALSE;
}
把每一个match作为数组的一个维度,就可以构造出一个数组,最终是否匹配的判断就转换成根据诸多match计算出的数组各维度索引指示的目标位置的元素是否为NULL(或者上述简单例子的stub)。可是且慢!上述的思路有一个大前提,那就是填充数组的那个人或者那个程序必须事先知道结果才行,对于既有的有限状态机,这是肯定的,然而对于上述的多match元素匹配,填充者在拿到输入前并不知道结果(有点废话,要是知道了结果还要那个判断程序干什么!!),因此必须让输入也参与到数组中来才行,因此必然这个输入是有限个的,毕竟数组必须是有限维度的。
- static const u8 tcp_conntracks[2][6][TCP_CONNTRACK_MAX] = {
- {
- /* ORIGINAL */
- /* sNO, sSS, sSR, sES, sFW, sCW, sLA, sTW, sCL, sS2 */
- /*syn*/ { sSS, sSS, sIG, sIG, sIG, sIG, sIG, sSS, sSS, sS2 },
- /*
- ...
- };
new_state = tcp_conntracks[dir][index][old_state];
上述公式中,dir就是IP_CT_DIR_REPLY或者IP_CT_DIR_ORIGINAL,index其实就是事件。初看,就可以看出这个要比一个while循环实现的状态机,原因就在于状态机完全数据化了,而不是常规的那样用代码逻辑if state-if event或者switch-case等硬编码完成的。在这个数组填充的时候,那些if state-if event等判断就已经做好了,数组填充完成了,直接拿来用就是了。
实际上,在Linux内核中,这样的实现还不止conntrack一个,IPVS也是一个很好的例子,net/netfilter/ipvs/ip_vs_proto_tcp.c:
- static struct tcp_states_t tcp_states [] = {
- /* INPUT */
- /* sNO, sES, sSS, sSR, sFW, sTW, sCL, sCW, sLA, sLI, sSA */
- /*syn*/ {{sSR, sES, sES, sSR, sSR, sSR, sSR, sSR, sSR, sSR, sSR }},
- /*fin*/ {{sCL, sCW, sSS, sTW, sTW, sTW, sCL, sCW, sLA, sLI, sTW }},
- /*ack*/ {{sCL, sES, sSS, sES, sFW, sTW, sCL, sCW, sCL, sLI, sES }},
- /*rst*/ {{sCL, sCL, sCL, sSR, sCL, sCL, sCL, sCL, sLA, sLI, sSR }},
- ...
- };
我这里给出一个例子,下图是一个一般的状态机
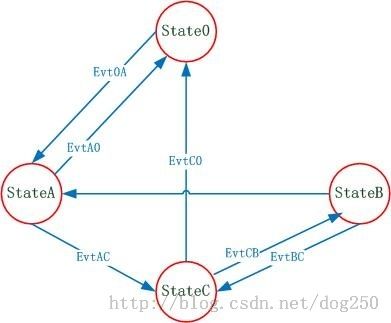
填充过程很简单,公式如下:
StateMachine[Event][OldSate]=NewState;
为此,我们先定义一套数据,将State和Event数据化:
- /*状态定义*/
- enum State{
- State0=0,
- StateA=1,
- StateB=2,
- StateC=3,
- };
- /*事件定义*/
- enum Event{
- Einit=0,
- Evt0A=1,
- EvtA0=2,
- EvtAC=3,
- EvtC0=4,
- EvtCB=5,
- EvtBC=6,
- };
NewState=StateMachine[Event][OldState];
按照上面的填充规则,终于,我们得到了下面的这个数组:
- StateMachine[][]=
- {
- /*Einit*/ {State0,}
- /*Evt0A*/ {StateA,},
- /*EvtA0*/ {stub,State0,},
- /*EvtAC*/ {stub,StateC,},
- /*EvtC0*/ {stub,stub,stub,State0,},
- /*EvtCB*/ {stub,stub,StateB,},
- /*EvtBC*/ {stub,stub,StateC,},
- }
看懂了这个例子以后,再回过头上ip_conntrack以及ipvs的TCP的状态机数组的例子,就更加清晰了,唯一不同的是,ip_conntrack通过一个新的维度来表示数据方向,而ipvs则通过一个base+offset的方式定位到了事件维度数组的索引。最后把上面的过程做成了一张图:
总结:
我们知道,任何程序都可以表示成一个状态机,这也是程序的本质,它本质上就是下面的形式:if (match0) {
do_something0;
} elif (match1) {
do_something1;
} elif (match2) {
do_something2;
}
但凡可以用这种方式表示的逻辑,都可以用一个多维数组来表示。常见的如BPF或者其它的过滤机制,本质上也是一些叠加判断:
if (match0 && match1 && match2 && match 3 && ...) {
return TRUE;
} else {
return FALSE;
}
把每一个match作为数组的一个维度,就可以构造出一个数组,最终是否匹配的判断就转换成根据诸多match计算出的数组各维度索引指示的目标位置的元素是否为NULL(或者上述简单例子的stub)。可是且慢!上述的思路有一个大前提,那就是填充数组的那个人或者那个程序必须事先知道结果才行,对于既有的有限状态机,这是肯定的,然而对于上述的多match元素匹配,填充者在拿到输入前并不知道结果(有点废话,要是知道了结果还要那个判断程序干什么!!),因此必须让输入也参与到数组中来才行,因此必然这个输入是有限个的,毕竟数组必须是有限维度的。
- 上一篇无状态TCP的ip_conntr