从导数的物理意义理解梯度下降
机器学习中常会用随机梯度下降法求解一个目标函数 L(Θ) ,并且常是最小化的一个优化问题:
我们所追求的是目标函数能够快速收敛或到达一个极小值点。而随机梯度法操作起来也很简单,不过是求偏导数而已,但是为什么是这样呢?为什么算出偏导数就能说下降得最快?初期并不很明了,后来看过一些数学相关的知识才稍微明白了一点,以下内容算是一个理解梯度的渐进过程。如果不当之处,欢迎指正。
以下关于梯度下降法,导数,偏导数的内容可在维基百科中找到,关于方向导数与梯度的内容可在高等数学书中找到。
预备知识
既然是从导数的物理意义进行理解,必然要先了解其物理意义是什么。 在以下内容中, 导数与偏导数大多数人都很熟悉, 请重点关注方向导数与梯度。
梯度下降法简介
梯度下降法(Gradient descent)是一个最优化算法,通常也称为最速下降法(Deepest gradient)。
梯度下降法,基于这样的观察:如果实值函数 F(x) 在点 a 处可微且有定义,那么函数 F(x) 在 a 点沿着梯度相反的方向 −∇F(a) 下降最快。
因而,如果 b=a−γ∇F(a)
对于 γ>0 为一个够小数值时成立,那么 F(a)≥F(b) 。
考虑到这一点,我们可以从函数F的局部极小值的初始估计 x0 出发,并考虑如下序列
x0 , x1 , x2 , …
使得 xn+1=xn−γn∇F(xn) , n≥0 。
因此可得到
F(x0)≥F(x1)≥F(x2)≥⋯ ,
如果顺利的话序列 (xn) 收敛到期望的极值。注意每次迭代步长 γ 可以改变。
下面的图片示例了这一过程,这里假设F定义在平面上,并且函数图像是一个碗形。蓝色的曲线是等高线(水平集),即函数F为常数的集合构成的曲线。红色的箭头指向该点梯度的反方向。(一点处的梯度方向与通过该点的等高线垂直)。沿着梯度下降方向,将最终到达碗底,即函数F值最小的点。

求解机器学习中的 min L(Θ) 问题,可以选择采用梯度下降法。
梯度下降法的缺点如下,为何可能会有下面的缺点,可在梯度下降法的维基百科中看到更多内容。这里仅当一个搬运工而已:
靠近极小值时速度减慢。
直线搜索可能会产生一些问题。
可能会’之字型’地下降。
导数
导数(Derivative)是微积分学中重要的基础概念。一个函数在某一点的导数描述了这个函数在这一点附近的变化率。导数的本质是通过极限的概念对函数进行局部的线性逼近。
当函数 f 的自变量在一点 x0 上产生一个增量 h 时,
函数输出值的增量与自变量增量 h 的比值在 h 趋于 0 时的极限如果存在,即为 f 在 x0 处的导数,记作 f′(x0) 、 dfdx(x0) 或 dfdx∣∣x=x0 .
物理意义上, 导数表示函数值在这一点的变化率。
偏导数
在数学中,一个多变量的函数的偏导数是它关于其中一个变量的导数,而保持其他变量恒定(相对于全导数,在其中所有变量都允许变化)。
假设 ƒ 是一个多元函数。例如:
f=x2+xy+y2 的图像。我们希望求出函数在点(1, 1, 3)的对 x 的偏导数;对应的切线与xOz平面平行。
因为曲面上的每一点都有无穷多条切线,描述这种函数的导数相当困难。偏导数就是选择其中一条切线,并求出它的斜率。通常,最感兴趣的是垂直于y轴(平行于xOz平面)的切线,以及垂直于x轴(平行于yOz平面)的切线。
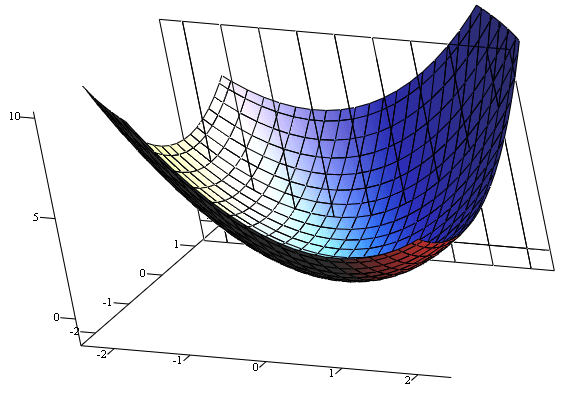
一种求出这些切线的好办法是把其他变量视为常数。例如,欲求出以上的函数在点(1, 1, 3)的与xOz平面平行的切线。上图中显示了函数 f=x2+xy+y2 的图像以及这个平面。下图中显示了函数在平面y = 1上是什么样的。我们把变量y视为常数,通过对方程求导,我们发现 ƒ 在点(x, y, z)的。我们把它记为:
∂z∂x=2x+y ,于是在点(1, 1, 3)的与xOz平面平行的切线的斜率是3。 ∂f∂x=3 在点(1, 1, 3),或称“f在(1, 1, 3)的关于x的偏导数是3”。

在几何意义上偏导数即为函数在坐标轴方向上的变化率。
方向导数
方向导数是分析学特别是多元微积分中的概念。一个标量场在某点沿着某个向量方向上的方向导数,描绘了该点附近标量场沿着该向量方向变动时的瞬时变化率。方向导数是偏导数的概念的推广。
方向导数定义式:

方向导数计算公式(在推导方向导数与梯度关系时用到):

几何意义上方向导数为函数在某点沿着其他特定方向(也便是这里的 l 方向)上的变化率。
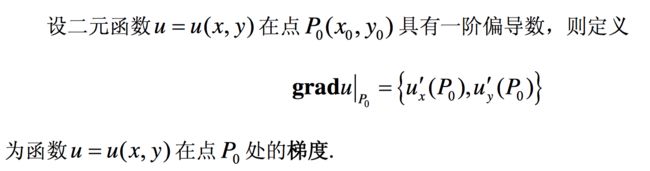
梯度
在一个数量场中,函数在给定点处沿不同的方向,其方向导数一般是不相同的。那么沿着哪一个方向其方向导数最大,其最大值为多少? 这是我们所关心的问题, 为此引进一个很重要的概念 –> 梯度。假设在点 p0 处, 函数值沿哪一方向增加的速度最快? 先说结论,沿着梯度方向增加的速度最快。
为什么沿着梯度方向,函数值增加最快
这里可以从方向导数与梯度的关系进行推导:


总结
函数在某一点处的方向导数在其梯度方向上达到最大值,此最大值即梯度的范数。
这就是说,沿梯度方向,函数值增加最快。同样可知,方向导数的最小值在梯度的相反方向取得,此最小值为最大值的相反数,从而沿梯度相反方向函数值的减少最快。详细内容:方向导数与梯度。
在机器学习中往往是最小化一个目标函数, 最大化问题也可转换为最小化问题, min L(Θ) ,理解了上面的内容,便很容易理解在梯度下降中常用的更新公式:
γ 在机器学习中常被称为学习率 ( learning rate ) , 也就是上面梯度下降法中的步长。
通过算出目标函数的梯度并在其反方向更新完参数 θ ,在此过程完成后也便是达到了函数值减少最快的效果,那么经过迭代以后目标函数即可很快地到达一个极小值。
注:
本文如有后续更新内容可在我的github博客找到,欢迎访问。