OpenCV通过cvFindContours与cvDrawCountours函数查找轮廓
FindContours 在二值图像中寻找轮廓
int cvFindContours(CvArr* image, CvMemStorage* storage, CvSeq** first_contour,int header_size=sizeof(CvContour), int mode=CV_RETR_LIST, int method=CV_CHAIN_APPROX_SIMPLE, CvPoint offset=cvPoint(0,0));
image:
输入的 8-比特、单通道图像. 非零元素被当成 1, 0 象素值保留为 0 - 从而图像被看成二值的。为了从灰度图像中得到这样的二值图像,可以使用 cvThreshold, cvAdaptiveThreshold 或 cvCanny. 本函数改变输入图像内容。
storage:
得到的轮廓的存储容器
first_contour:
输出参数:包含第一个输出轮廓的指针
header_size:
如果 method=CV_CHAIN_CODE,则序列头的大小 >=sizeof(CvChain),否则 >=sizeof(CvContour) .
mode:
提取模式.
CV_RETR_EXTERNAL - 只提取最外层的轮廓
CV_RETR_LIST - 提取所有轮廓,并且放置在 list 中
CV_RETR_CCOMP - 提取所有轮廓,并且将其组织为两层的 hierarchy: 顶层为连通域的外围边界,次层为洞的内层边界。
CV_RETR_TREE - 提取所有轮廓,并且重构嵌套轮廓的全部 hierarchy
method:
逼近方法 (对所有节点, 不包括使用内部逼近的 CV_RETR_RUNS).
CV_CHAIN_CODE - Freeman 链码的输出轮廓. 其它方法输出多边形(定点序列).
CV_CHAIN_APPROX_NONE - 将所有点由链码形式翻译(转化)为点序列形式
CV_CHAIN_APPROX_SIMPLE - 压缩水平、垂直和对角分割,即函数只保留末端的象素点;
CV_CHAIN_APPROX_TC89_L1,
CV_CHAIN_APPROX_TC89_KCOS - 应用 Teh-Chin 链逼近算法. CV_LINK_RUNS - 通过连接为 1 的水平碎片使用完全不同的轮廓提取算法。仅有 CV_RETR_LIST 提取模式可以在本方法中应用.
offset:
每一个轮廓点的偏移量. 当轮廓是从图像 ROI 中提取出来的时候,使用偏移量有用,因为可以从整个图像上下文来对轮廓做分析.
函数 cvFindContours 从二值图像中提取轮廓,并且返回提取轮廓的数目。指针 first_contour 的内容由函数填写。它包含第一个最外层轮廓的指针,如果指针为 NULL,则没有检测到轮廓(比如图像是全黑的)。其它轮廓可以从 first_contour 利用 h_next 和 v_next 链接访问到。 在 cvDrawContours 的样例显示如何使用轮廓来进行连通域的检测。轮廓也可以用来做形状分析和对象识别 - 见CVPR2001 教程中的 squares 样例。该教程可以在 SourceForge 网站上找到。
DrawContours 在图像中绘制外部和内部的轮廓。
void cvDrawContours( CvArr *img, CvSeq* contour,CvScalar external_color, CvScalar hole_color,int max_level, int thickness=1,int line_type=8, CvPoint offset=cvPoint(0,0) );
img:
用以绘制轮廓的图像。和其他绘图函数一样,边界图像被感兴趣区域(ROI)所剪切。
contour:
指针指向第一个轮廓。
external_color:
外层轮廓的颜色。
hole_color:
内层轮廓的颜色。
max_level:
绘制轮廓的最大等级。如果等级为0,绘制单独的轮廓。如果为1,绘制轮廓及在其后的相同的级别下轮廓。如果值为2,所有的轮廓。如果等级为2,绘制所有同级轮廓及所有低一级轮廓,诸此种种。如果值为负数,函数不绘制同级轮廓,但会升序绘制直到级别为abs(max_level)-1的子轮廓。
thickness:
绘制轮廓时所使用的线条的粗细度。如果值为负(e.g. =CV_FILLED),绘制内层轮廓。
line_type:
线条的类型。参考cvLine.
offset:
照给出的偏移量移动每一个轮廓点坐标.当轮廓是从某些感兴趣区域(ROI)中提取的然后需要在运算中考虑ROI偏移量时,将会用到这个参数。
当thickness>=0,函数cvDrawContours在图像中绘制轮廓,或者当thickness<0时,填充轮廓所限制的区域。
#include <stdio.h>
#include <cv.h>
#include <cxcore.h>
#include <highgui.h>
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
// 内轮廓填充
// 参数:
// 1. pBinary: 输入二值图像,单通道,位深IPL_DEPTH_8U。
// 2. dAreaThre: 面积阈值,当内轮廓面积小于等于dAreaThre时,进行填充。
void FillInternalContours(IplImage *pBinary, double dAreaThre)
{
double dConArea;
CvSeq *pContour = NULL;
CvSeq *pConInner = NULL;
CvMemStorage *pStorage = NULL;
// 执行条件
if (pBinary)
{
// 查找所有轮廓
pStorage = cvCreateMemStorage(0);
cvFindContours(pBinary, pStorage, &pContour, sizeof(CvContour), CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE);
// 填充所有轮廓
cvDrawContours(pBinary, pContour, CV_RGB(255, 255, 255), CV_RGB(255, 255, 255), 2, CV_FILLED, 8, cvPoint(0, 0));
// 外轮廓循环
int wai = 0;
int nei = 0;
for (; pContour != NULL; pContour = pContour->h_next)
{
wai++;
// 内轮廓循环
for (pConInner = pContour->v_next; pConInner != NULL; pConInner = pConInner->h_next)
{
nei++;
// 内轮廓面积
dConArea = fabs(cvContourArea(pConInner, CV_WHOLE_SEQ));
printf("%f\n", dConArea);
}
CvRect rect = cvBoundingRect(pContour,0);
cvRectangle(pBinary, cvPoint(rect.x, rect.y), cvPoint(rect.x + rect.width, rect.y + rect.height),CV_RGB(255,255, 255), 1, 8, 0);
}
printf("wai = %d, nei = %d", wai, nei);
cvReleaseMemStorage(&pStorage);
pStorage = NULL;
}
}
int Otsu(IplImage* src)
{
int height=src->height;
int width=src->width;
//histogram
float histogram[256] = {0};
for(int i=0; i < height; i++)
{
unsigned char* p=(unsigned char*)src->imageData + src->widthStep * i;
for(int j = 0; j < width; j++)
{
histogram[*p++]++;
}
}
//normalize histogram
int size = height * width;
for(int i = 0; i < 256; i++)
{
histogram[i] = histogram[i] / size;
}
//average pixel value
float avgValue=0;
for(int i=0; i < 256; i++)
{
avgValue += i * histogram[i]; //整幅图像的平均灰度
}
int threshold;
float maxVariance=0;
float w = 0, u = 0;
for(int i = 0; i < 256; i++)
{
w += histogram[i]; //假设当前灰度i为阈值, 0~i 灰度的像素(假设像素值在此范围的像素叫做前景像素) 所占整幅图像的比例
u += i * histogram[i]; // 灰度i 之前的像素(0~i)的平均灰度值: 前景像素的平均灰度值
float t = avgValue * w - u;
float variance = t * t / (w * (1 - w) );
if(variance > maxVariance)
{
maxVariance = variance;
threshold = i;
}
}
return threshold;
}
int main()
{
IplImage *img = cvLoadImage("c://temp.jpg", 0);
IplImage *bin = cvCreateImage(cvGetSize(img), 8, 1);
int thresh = Otsu(img);
cvThreshold(img, bin, thresh, 255, CV_THRESH_BINARY);
FillInternalContours(bin, 200);
cvNamedWindow("img");
cvShowImage("img", img);
cvNamedWindow("result");
cvShowImage("result", bin);
cvWaitKey(-1);
cvReleaseImage(&img);
cvReleaseImage(&bin);
return 0;
}
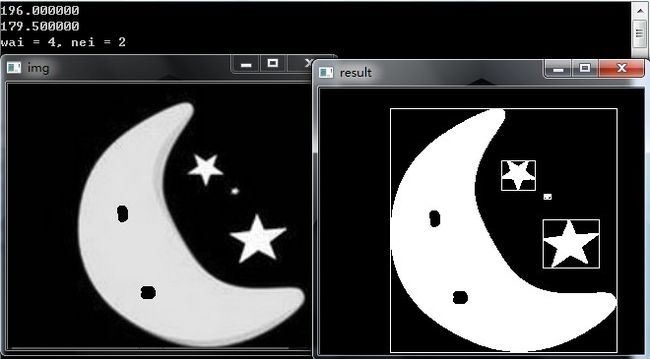
这种情况下,大月亮内部的两个内轮廓没有框出来。这个不是因为我的 rect框是 白色的缘故。。。。应该。
我断点试了,就 cvRectangle 了 4次···
#include <stdio.h>
#include <cv.h>
#include <highgui.h>
#include <math.h>
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
int main(int argc, char* argv[])
{
IplImage *src = cvLoadImage(".\\test.png", 0);
IplImage *dsw = cvCreateImage(cvGetSize(src), 8, 1);
IplImage *dst = cvCreateImage(cvGetSize(src), 8, 3);
CvMemStorage *storage = cvCreateMemStorage(0);
CvSeq *first_contour = NULL;
//turn the src image to a binary image
//cvThreshold(src, dsw, 125, 255, CV_THRESH_BINARY_INV);
cvThreshold(src, dsw, 100, 255, CV_THRESH_BINARY);
cvFindContours(dsw, storage, &first_contour, sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE);
cvZero(dst);
int cnt = 0;
for(; first_contour != 0; first_contour = first_contour->h_next)
{
cnt++;
CvScalar color = CV_RGB(rand()&255, rand()&255, rand()&255);
cvDrawContours(dst, first_contour, color, color, 0, 2, CV_FILLED, cvPoint(0, 0));
CvRect rect = cvBoundingRect(first_contour,0);
cvRectangle(dst, cvPoint(rect.x, rect.y), cvPoint(rect.x + rect.width, rect.y + rect.height),CV_RGB(255, 0, 0), 1, 8, 0);
}
printf("the num of contours : %d\n", cnt);
cvNamedWindow( "Source", 1 );
cvShowImage( "Source", src );
cvNamedWindow( "dsw", 1 );
cvShowImage( "dsw", dsw );
cvNamedWindow( "Components", 1 );
cvShowImage( "Components", dst );
cvReleaseMemStorage(&storage);
cvWaitKey(-1);
return 0;
}
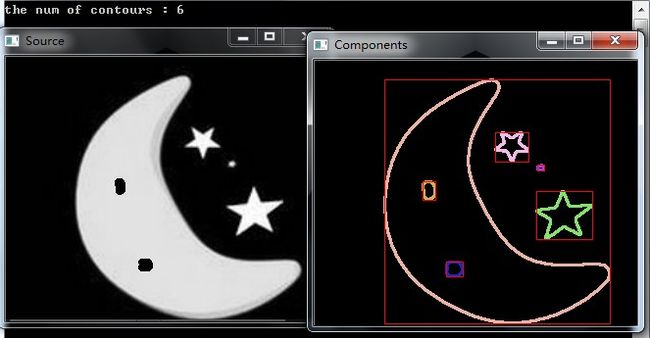
这种情况下 内轮廓也框出来了。。。。。
看来阈值的选择与想要的结果有很大关系哦。
如何适应不同的图片呢?????????????????
还有,每幅图片里面,最大的轮廓是整幅图像,可以根据其面积最大,去除 哦~~~修改如下:
area = fabs(cvContourArea(first_contour, CV_WHOLE_SEQ)); //cal the hole's area
在写后面那个 内轮廓填充的时候,才发现, dsw 是我二值化之后的图像,很明显不应该是这样子的呀。
我把 关于 Contours 的函数删除之后 又 恢复正常了。不知道为嘛呢。 很显然查出来的轮廓是 正确二值化之后的吧。 不知道为嘛会这样显示呢。
再看另一个图的结果:
总有 9 个轮廓。
另外,计算了下,每个大轮廓内部的 小轮廓的数目 conner ,结果显示都为0.
看看第一个大五角星。 应该是把 边边作为了一个轮廓, 把 内部 黑色区域作为一个 轮廓 了吧????
还有,这幅图片 没有被当做一个大轮廓,上面那个小猫的,整幅图片被框了一下啊。。。。。。。。。。。。

另外i, 把 关于 cvFindContours && cvDrawContours 两个函数部分删除,二值化结果如下:
