文章标题Eigen的矩阵运算使用
在ROS的Cmake中使用Eigen库进行矩阵和向量的运算和很方便。下面逐步添加他的使用方法。
1 配置
首先要在CmakeLists.txt中先进行设置:
由于Eigen是ros以外的库,所以要单独的使用
find_package(Eigen REQUIRED)
同时Eigen依赖cmake_modules。所以还要
find_package(catkin REQUIRED COMPONENTS
cmake_modules)。
2 认识一些头文件
Eigen库分为 核心模块和额外模块两部分,每个模块都有一个用这个模块所相对应的头文件,Eigen和Dense头文件方便的同时包含了几个头文件以供使用。下面做简单介绍:
——Core
有关矩阵和数组的类,有基本的线性代数(包含 三角形 和 自伴乘积 相关),还有相应对数组的操作。
——Geometry
几何学的类,有关转换、平移、进位制、2D旋转、3D旋转(四元组和角轴相关)
——LU
逻辑单元的类,有关求逆,求行列式,LU分解解算器(FullPivLU,PartialPivLU)
——Cholesky
包含LLT和LDLT的乔里斯基因式分解法。
(小科普:Cholesky分解是把一个对称正定的矩阵表示成一个下三角矩阵L和其转置的乘积的分解)
——Householder
豪斯霍尔德变换,这个模块供几个线性代数模块使用。
(Householder transform: 维基百科 )
——SVD
奇异值分解,最小二乘解算器解决奇异值分解。
——QR
QR分解求解,三种方法:HouseholderQR、ColPivHouseholderQR、FullPivHouseholderQR
——Eigenvalues
特征值和特征向量分解的方法:EigenSolver、SelfAdjointEigenSolver、ComplexEigenSolver
——Sparse
稀疏矩阵相关类,对于稀疏矩阵的存储及相关基本线性代数
——Dense
包含: Core、Gelometry、LU、Cholesky、SVD、QR和Eigenvalues模块(头文件)
——Eigen
包含上述所有的模块(头文件)
3 矩阵简单操作
Eigen提供了两种密集的对象Matrix(矩阵)和Vector(向量)。
这两者是通过矩阵模板类和一维或二维的数组模板类来实现的。
这两者有几点不同:
——Matrix类型变量加减法,若行列数不相等,则不能做加减;
Array类型的可以加减一个常数(各个元素分别加减该常数)。
——Matrix与Array类型变量做乘法也会有不同,Matrix是矩阵相乘,Array是对应元素相乘。
——但两者可以相互转换,方法为 .array() 和 .matrix()。
3.1 定义
定义矩阵时,默认没有初始化,必须自己初始化。
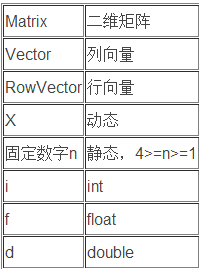
Eigen的矩阵类型,一般是Matrix后面跟类型符号来表示,比如说:
——’ d ’ 代表 double,矩阵存储的是double型的数据
——’ f ’ 代表float,矩阵存储的是float类型数据
——’ c ‘代表complex,矩阵存数的是复数类型数据
——’ i ‘代表int,矩阵存储的是整数类型
相应关系为:
3.2 初始化
m1=MatrixXf::Zero(3,4); // 将矩阵3行4列初始化为0
m2=MatrixXf::Ones(3,3); // 将矩阵3行3列初始化为1
v1=Vector3f::Ones(); // 将3行的纵向量初始化为1
cout<<"m1=\n"<<m1<<endl;
cout<<"m2=\n"<<m2<<endl;
cout<<"v1=\n"<<v1<<endl;运行结果为:

3.3 访问
直接就同数组的访问方式一样,但是不是方括号,而是圆括号:
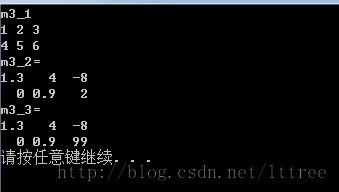
MatrixXf m3(2,3);
m3<<1,2,3,4,5,6;
cout<<"m3_1\n"<<m3<<endl;
// 为了美观点,更像个矩阵,可以换行写
m3<<1.3,4,-8,
0,0.9,2;
cout<<"m3_2=\n"<<m3<<endl;
// 将第2行第3列的值改为99
m3(1,2)=99;
cout<<"m3_3=\n"<<m3<<endl;当然,同数组一样,第一行第一列的下标为(0,0)
输出结果:
4 矩阵的运算
——置0
——置1
——随机矩阵
——单位阵
——求逆
——转置
——数乘矩阵
——向量求模值
//求向量模值 norm()
<span style="white-space:pre"> </span>MatrixXf m1(3,3);
// 矩阵全部元素置0
m1.setZero();
cout<<"m1_1=\n"<<m1<<endl;
// 矩阵全部元素置1 ( 这里行列值不填,默认定义时候的行列,
// 若填写,则矩阵也会更改为填写的行列值 )
m1.setOnes(2,2);
cout<<"m1_2=\n"<<m1<<endl;
// 随机生成一个矩阵
m1.setRandom();
cout<<"m1_3=\n"<<m1<<endl;
// 置单位矩阵
m1.setIdentity(3,3);
cout<<"m1_4=\n"<<m1<<endl;
m1<< 1 , 2 , 3 ,
5 , 9 ,10 ,
7 , 0 ,1 ;
// 矩阵求逆
m1.inverse();
cout<<"m1_5=\n"<<m1<<endl;
// 矩阵转置
m1.transpose();
cout<<"m1_6=\n"<<m1<<endl;
// 数 * 矩阵 ( 数 / 矩阵 )
m1 = 2.6 * m1 ;
cout<<"m1_7=\n"<<m1<<endl;
待更新。。。。。
参考:
http://blog.csdn.net/lttree/article/details/39099315