前景检测算法_1(codebook和平均背景法)
前景检测算法_1(codebook和平均背景法)
前景分割中一个非常重要的研究方向就是背景减图法,因为背景减图的方法简单,原理容易被想到,且在智能视频监控领域中,摄像机很多情况下是固定的,且背景也是基本不变或者是缓慢变换的,在这种场合背景减图法的应用驱使了其不少科研人员去研究它。
但是背景减图获得前景图像的方法缺点也很多:比如说光照因素,遮挡因素,动态周期背景,且背景非周期背景,且一般情况下我们考虑的是每个像素点之间独立,这对实际应用留下了很大的隐患。
这一小讲主要是讲简单背景减图法和codebook法。
一、简单背景减图法的工作原理。
在视频对背景进行建模的过程中,每2帧图像之间对应像素点灰度值算出一个误差值,在背景建模时间内算出该像素点的平均值,误差平均值,然后在平均差值的基础上+-误差平均值的常数(这个系数需要手动调整)倍作为背景图像的阈值范围,所以当进行前景检测时,当相应点位置来了一个像素时,如果来的这个像素的每个通道的灰度值都在这个阈值范围内,则认为是背景用0表示,否则认为是前景用255表示。
下面的一个工程是learning opencv一书中作者提供的源代码,关于简单背景减图的代码和注释如下:
avg_background.h文件:
1 /////////////////////////////////////////////////////////////////////////////////////////////////////////////////// 2 // Accumulate average and ~std (really absolute difference) image and use this to detect background and foreground 3 // 4 // Typical way of using this is to: 5 // AllocateImages(); 6 ////loop for N images to accumulate background differences 7 // accumulateBackground(); 8 ////When done, turn this into our avg and std model with high and low bounds 9 // createModelsfromStats(); 10 ////Then use the function to return background in a mask (255 == foreground, 0 == background) 11 // backgroundDiff(IplImage *I,IplImage *Imask, int num); 12 ////Then tune the high and low difference from average image background acceptance thresholds 13 // float scalehigh,scalelow; //Set these, defaults are 7 and 6. Note: scalelow is how many average differences below average 14 // scaleHigh(scalehigh); 15 // scaleLow(scalelow); 16 ////That is, change the scale high and low bounds for what should be background to make it work. 17 ////Then continue detecting foreground in the mask image 18 // backgroundDiff(IplImage *I,IplImage *Imask, int num); 19 // 20 //NOTES: num is camera number which varies from 0 ... NUM_CAMERAS - 1. Typically you only have one camera, but this routine allows 21 // you to index many. 22 // 23 #ifndef AVGSEG_ 24 #define AVGSEG_ 25 26 27 #include "cv.h" // define all of the opencv classes etc. 28 #include "highgui.h" 29 #include "cxcore.h" 30 31 //IMPORTANT DEFINES: 32 #define NUM_CAMERAS 1 //This function can handle an array of cameras 33 #define HIGH_SCALE_NUM 7.0 //How many average differences from average image on the high side == background 34 #define LOW_SCALE_NUM 6.0 //How many average differences from average image on the low side == background 35 36 void AllocateImages(IplImage *I); 37 void DeallocateImages(); 38 void accumulateBackground(IplImage *I, int number=0); 39 void scaleHigh(float scale = HIGH_SCALE_NUM, int num = 0); 40 void scaleLow(float scale = LOW_SCALE_NUM, int num = 0); 41 void createModelsfromStats(); 42 void backgroundDiff(IplImage *I,IplImage *Imask, int num = 0); 43 44 #endif
avg_background.cpp文件:
1 // avg_background.cpp : 定义控制台应用程序的入口点。 2 // 3 4 #include "stdafx.h" 5 #include "avg_background.h" 6 7 8 //GLOBALS 9 10 IplImage *IavgF[NUM_CAMERAS],*IdiffF[NUM_CAMERAS], *IprevF[NUM_CAMERAS], *IhiF[NUM_CAMERAS], *IlowF[NUM_CAMERAS]; 11 IplImage *Iscratch,*Iscratch2,*Igray1,*Igray2,*Igray3,*Imaskt; 12 IplImage *Ilow1[NUM_CAMERAS],*Ilow2[NUM_CAMERAS],*Ilow3[NUM_CAMERAS],*Ihi1[NUM_CAMERAS],*Ihi2[NUM_CAMERAS],*Ihi3[NUM_CAMERAS]; 13 14 float Icount[NUM_CAMERAS]; 15 16 void AllocateImages(IplImage *I) //I is just a sample for allocation purposes 17 { 18 for(int i = 0; i<NUM_CAMERAS; i++){ 19 IavgF[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 3 ); 20 IdiffF[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 3 ); 21 IprevF[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 3 ); 22 IhiF[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 3 ); 23 IlowF[i] = cvCreateImage(cvGetSize(I), IPL_DEPTH_32F, 3 ); 24 Ilow1[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 25 Ilow2[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 26 Ilow3[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 27 Ihi1[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 28 Ihi2[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 29 Ihi3[i] = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 30 cvZero(IavgF[i] ); 31 cvZero(IdiffF[i] ); 32 cvZero(IprevF[i] ); 33 cvZero(IhiF[i] ); 34 cvZero(IlowF[i] ); 35 Icount[i] = 0.00001; //Protect against divide by zero 36 } 37 Iscratch = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 3 ); 38 Iscratch2 = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 3 ); 39 Igray1 = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 40 Igray2 = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 41 Igray3 = cvCreateImage( cvGetSize(I), IPL_DEPTH_32F, 1 ); 42 Imaskt = cvCreateImage( cvGetSize(I), IPL_DEPTH_8U, 1 ); 43 44 cvZero(Iscratch); 45 cvZero(Iscratch2 ); 46 } 47 48 void DeallocateImages() 49 { 50 for(int i=0; i<NUM_CAMERAS; i++){ 51 cvReleaseImage(&IavgF[i]); 52 cvReleaseImage(&IdiffF[i] ); 53 cvReleaseImage(&IprevF[i] ); 54 cvReleaseImage(&IhiF[i] ); 55 cvReleaseImage(&IlowF[i] ); 56 cvReleaseImage(&Ilow1[i] ); 57 cvReleaseImage(&Ilow2[i] ); 58 cvReleaseImage(&Ilow3[i] ); 59 cvReleaseImage(&Ihi1[i] ); 60 cvReleaseImage(&Ihi2[i] ); 61 cvReleaseImage(&Ihi3[i] ); 62 } 63 cvReleaseImage(&Iscratch); 64 cvReleaseImage(&Iscratch2); 65 66 cvReleaseImage(&Igray1 ); 67 cvReleaseImage(&Igray2 ); 68 cvReleaseImage(&Igray3 ); 69 70 cvReleaseImage(&Imaskt); 71 } 72 73 // Accumulate the background statistics for one more frame 74 // We accumulate the images, the image differences and the count of images for the 75 // the routine createModelsfromStats() to work on after we're done accumulating N frames. 76 // I Background image, 3 channel, 8u 77 // number Camera number 78 void accumulateBackground(IplImage *I, int number) 79 { 80 static int first = 1; 81 cvCvtScale(I,Iscratch,1,0); //To float;#define cvCvtScale cvConvertScale #define cvScale cvConvertScale 82 if (!first){ 83 cvAcc(Iscratch,IavgF[number]);//将2幅图像相加:IavgF[number]=IavgF[number]+Iscratch,IavgF[]里面装的是时间序列图片的累加 84 cvAbsDiff(Iscratch,IprevF[number],Iscratch2);//将2幅图像相减:Iscratch2=abs(Iscratch-IprevF[number]); 85 cvAcc(Iscratch2,IdiffF[number]);//IdiffF[]里面装的是图像差的累积和 86 Icount[number] += 1.0;//累积的图片帧数计数 87 } 88 first = 0; 89 cvCopy(Iscratch,IprevF[number]);//执行完该函数后,将当前帧数据保存为前一帧数据 90 } 91 92 // Scale the average difference from the average image high acceptance threshold 93 void scaleHigh(float scale, int num)//设定背景建模时的高阈值函数 94 { 95 cvConvertScale(IdiffF[num],Iscratch,scale); //Converts with rounding and saturation 96 cvAdd(Iscratch,IavgF[num],IhiF[num]);//将平均累积图像与误差累积图像缩放scale倍然后再相加 97 cvCvtPixToPlane( IhiF[num], Ihi1[num],Ihi2[num],Ihi3[num], 0 );//#define cvCvtPixToPlane cvSplit,且cvSplit是将一个多通道矩阵转换为几个单通道矩阵 98 } 99 100 // Scale the average difference from the average image low acceptance threshold 101 void scaleLow(float scale, int num)//设定背景建模时的低阈值函数 102 { 103 cvConvertScale(IdiffF[num],Iscratch,scale); //Converts with rounding and saturation 104 cvSub(IavgF[num],Iscratch,IlowF[num]);//将平均累积图像与误差累积图像缩放scale倍然后再相减 105 cvCvtPixToPlane( IlowF[num], Ilow1[num],Ilow2[num],Ilow3[num], 0 ); 106 } 107 108 //Once you've learned the background long enough, turn it into a background model 109 void createModelsfromStats() 110 { 111 for(int i=0; i<NUM_CAMERAS; i++) 112 { 113 cvConvertScale(IavgF[i],IavgF[i],(double)(1.0/Icount[i]));//此处为求出累积求和图像的平均值 114 cvConvertScale(IdiffF[i],IdiffF[i],(double)(1.0/Icount[i]));//此处为求出累计误差图像的平均值 115 cvAddS(IdiffF[i],cvScalar(1.0,1.0,1.0),IdiffF[i]); //Make sure diff is always something,cvAddS是用于一个数值和一个标量相加 116 scaleHigh(HIGH_SCALE_NUM,i);//HIGH_SCALE_NUM初始定义为7,其实就是一个倍数 117 scaleLow(LOW_SCALE_NUM,i);//LOW_SCALE_NUM初始定义为6 118 } 119 } 120 121 // Create a binary: 0,255 mask where 255 means forground pixel 122 // I Input image, 3 channel, 8u 123 // Imask mask image to be created, 1 channel 8u 124 // num camera number. 125 // 126 void backgroundDiff(IplImage *I,IplImage *Imask, int num) //Mask should be grayscale 127 { 128 cvCvtScale(I,Iscratch,1,0); //To float; 129 //Channel 1 130 cvCvtPixToPlane( Iscratch, Igray1,Igray2,Igray3, 0 ); 131 cvInRange(Igray1,Ilow1[num],Ihi1[num],Imask);//Igray1[]中相应的点在Ilow1[]和Ihi1[]之间时,Imask中相应的点为255(背景符合) 132 //Channel 2 133 cvInRange(Igray2,Ilow2[num],Ihi2[num],Imaskt);//也就是说对于每一幅图像的绝对值差小于绝对值差平均值的6倍或者大于绝对值差平均值的7倍被认为是前景图像 134 cvOr(Imask,Imaskt,Imask); 135 //Channel 3 136 cvInRange(Igray3,Ilow3[num],Ihi3[num],Imaskt);//这里的固定阈值6和7太不合理了,还好工程后面可以根据实际情况手动调整! 137 cvOr(Imask,Imaskt,Imask); 138 //Finally, invert the results 139 cvSubRS( Imask, cvScalar(255), Imask);//前景用255表示了,背景是用0表示 140 }
二、codebook算法工作原理
考虑到简单背景减图法无法对动态的背景建模,有学者就提出了codebook算法。
该算法为图像中每一个像素点建立一个码本,每个码本可以包括多个码元,每个码元有它的学习时最大最小阈值,检测时的最大最小阈值等成员。在背景建模期间,每当来了一幅新图片,对每个像素点进行码本匹配,也就是说如果该像素值在码本中某个码元的学习阈值内,则认为它离过去该对应点出现过的历史情况偏离不大,通过一定的像素值比较,如果满足条件,此时还可以更新对应点的学习阈值和检测阈值。如果新来的像素值对码本中每个码元都不匹配,则有可能是由于背景是动态的,所以我们需要为其建立一个新的码元,并且设置相应的码元成员变量。因此,在背景学习的过程中,每个像素点可以对应多个码元,这样就可以学到复杂的动态背景。
关于codebook算法的代码和注释如下:
cv_yuv_codebook.h文件:
1 /////////////////////////////////////////////////////////////////////////////////////////////////////////////////// 2 // Accumulate average and ~std (really absolute difference) image and use this to detect background and foreground 3 // 4 // Typical way of using this is to: 5 // AllocateImages(); 6 ////loop for N images to accumulate background differences 7 // accumulateBackground(); 8 ////When done, turn this into our avg and std model with high and low bounds 9 // createModelsfromStats(); 10 ////Then use the function to return background in a mask (255 == foreground, 0 == background) 11 // backgroundDiff(IplImage *I,IplImage *Imask, int num); 12 ////Then tune the high and low difference from average image background acceptance thresholds 13 // float scalehigh,scalelow; //Set these, defaults are 7 and 6. Note: scalelow is how many average differences below average 14 // scaleHigh(scalehigh); 15 // scaleLow(scalelow); 16 ////That is, change the scale high and low bounds for what should be background to make it work. 17 ////Then continue detecting foreground in the mask image 18 // backgroundDiff(IplImage *I,IplImage *Imask, int num); 19 // 20 //NOTES: num is camera number which varies from 0 ... NUM_CAMERAS - 1. Typically you only have one camera, but this routine allows 21 // you to index many. 22 // 23 #ifndef AVGSEG_ 24 #define AVGSEG_ 25 26 27 #include "cv.h" // define all of the opencv classes etc. 28 #include "highgui.h" 29 #include "cxcore.h" 30 31 //IMPORTANT DEFINES: 32 #define NUM_CAMERAS 1 //This function can handle an array of cameras 33 #define HIGH_SCALE_NUM 7.0 //How many average differences from average image on the high side == background 34 #define LOW_SCALE_NUM 6.0 //How many average differences from average image on the low side == background 35 36 void AllocateImages(IplImage *I); 37 void DeallocateImages(); 38 void accumulateBackground(IplImage *I, int number=0); 39 void scaleHigh(float scale = HIGH_SCALE_NUM, int num = 0); 40 void scaleLow(float scale = LOW_SCALE_NUM, int num = 0); 41 void createModelsfromStats(); 42 void backgroundDiff(IplImage *I,IplImage *Imask, int num = 0); 43 44 #endif
cv_yuv_codebook.cpp文件:
1 ////////YUV CODEBOOK 2 // Gary Bradski, July 14, 2005 3 4 5 #include "stdafx.h" 6 #include "cv_yuv_codebook.h" 7 8 //GLOBALS FOR ALL CAMERA MODELS 9 10 //For connected components: 11 int CVCONTOUR_APPROX_LEVEL = 2; // Approx.threshold - the bigger it is, the simpler is the boundary 12 int CVCLOSE_ITR = 1; // How many iterations of erosion and/or dialation there should be 13 //#define CVPERIMSCALE 4 // image (width+height)/PERIMSCALE. If contour lenght < this, delete that contour 14 15 //For learning background 16 17 //Just some convienience macros 18 #define CV_CVX_WHITE CV_RGB(0xff,0xff,0xff) 19 #define CV_CVX_BLACK CV_RGB(0x00,0x00,0x00) 20 21 22 /////////////////////////////////////////////////////////////////////////////////// 23 // int updateCodeBook(uchar *p, codeBook &c, unsigned cbBounds) 24 // Updates the codebook entry with a new data point 25 // 26 // p Pointer to a YUV pixel 27 // c Codebook for this pixel 28 // cbBounds Learning bounds for codebook (Rule of thumb: 10) 29 // numChannels Number of color channels we're learning 30 // 31 // NOTES: 32 // cvBounds must be of size cvBounds[numChannels] 33 // 34 // RETURN 35 // codebook index 36 int cvupdateCodeBook(uchar *p, codeBook &c, unsigned *cbBounds, int numChannels) 37 { 38 39 if(c.numEntries == 0) c.t = 0;//说明每个像素如果遍历了的话至少对应一个码元 40 c.t += 1; //Record learning event,遍历该像素点的次数加1 41 //SET HIGH AND LOW BOUNDS 42 int n; 43 unsigned int high[3],low[3]; 44 for(n=0; n<numChannels; n++)//为该像素点的每个通道设置最大阈值和最小阈值,后面用来更新学习的高低阈值时有用 45 { 46 high[n] = *(p+n)+*(cbBounds+n); 47 if(high[n] > 255) high[n] = 255; 48 low[n] = *(p+n)-*(cbBounds+n); 49 if(low[n] < 0) low[n] = 0; 50 } 51 int matchChannel; 52 //SEE IF THIS FITS AN EXISTING CODEWORD 53 int i; 54 for(i=0; i<c.numEntries; i++)//需要对所有的码元进行扫描 55 { 56 matchChannel = 0; 57 for(n=0; n<numChannels; n++) 58 { 59 //这个地方要非常小心,if条件不是下面表达的 60 //if((c.cb[i]->min[n]-c.cb[i]->learnLow[n] <= *(p+n)) && (*(p+n) <= c.cb[i]->max[n]+c.cb[i]->learnHigh[n])) 61 //原因是因为在每次建立一个新码元的时候,learnHigh[n]和learnLow[n]的范围就在max[n]和min[n]上扩展了cbBounds[n],所以说 62 //learnHigh[n]和learnLow[n]的变化范围实际上比max[n]和min[n]的大 63 if((c.cb[i]->learnLow[n] <= *(p+n)) && (*(p+n) <= c.cb[i]->learnHigh[n])) //Found an entry for this channel 64 { 65 matchChannel++; 66 } 67 } 68 if(matchChannel == numChannels) //If an entry was found over all channels,找到了该元素此刻对应的码元 69 { 70 c.cb[i]->t_last_update = c.t; 71 //adjust this codeword for the first channel 72 //更新每个码元的最大最小阈值,因为这2个阈值在后面的前景分离过程要用到 73 for(n=0; n<numChannels; n++) 74 { 75 if(c.cb[i]->max[n] < *(p+n))//用该点的像素值更新该码元的最大值,所以max[n]保存的是实际上历史出现过的最大像素值 76 { 77 c.cb[i]->max[n] = *(p+n);//因为这个for语句是在匹配成功了的条件阈值下的,所以一般来说改变后的max[n]和min[n] 78 //也不会过学习的高低阈值,并且学习的高低阈值也一直在缓慢变化 79 } 80 else if(c.cb[i]->min[n] > *(p+n))//用该点的像素值更新该码元的最小值,所以min[n]保存的是实际上历史出现过的最小像素值 81 { 82 c.cb[i]->min[n] = *(p+n); 83 } 84 } 85 break;//一旦找到了该像素的一个码元后就不用继续往后找了,加快算法速度。因为最多只有一个码元与之对应 86 } 87 } 88 89 //OVERHEAD TO TRACK POTENTIAL STALE ENTRIES 90 for(int s=0; s<c.numEntries; s++) 91 { 92 //This garbage is to track which codebook entries are going stale 93 int negRun = c.t - c.cb[s]->t_last_update;//negRun表示码元没有更新的时间间隔 94 if(c.cb[s]->stale < negRun) c.cb[s]->stale = negRun;//更新每个码元的statle 95 } 96 97 98 //ENTER A NEW CODE WORD IF NEEDED 99 if(i == c.numEntries) //No existing code word found, make a new one,只有当该像素码本中的所有码元都不符合要求时才满足if条件 100 { 101 code_element **foo = new code_element* [c.numEntries+1];//创建一个新的码元序列 102 for(int ii=0; ii<c.numEntries; ii++) 103 { 104 foo[ii] = c.cb[ii];//将码本前面所有的码元地址赋给foo 105 } 106 foo[c.numEntries] = new code_element;//创建一个新码元并赋给foo指针的下一个空位 107 if(c.numEntries) delete [] c.cb;//? 108 c.cb = foo; 109 for(n=0; n<numChannels; n++)//给新建立的码元结构体元素赋值 110 { 111 c.cb[c.numEntries]->learnHigh[n] = high[n];//当建立一个新码元时,用当前值附近cbBounds范围作为码元box的学习阈值 112 c.cb[c.numEntries]->learnLow[n] = low[n]; 113 c.cb[c.numEntries]->max[n] = *(p+n);//当建立一个新码元时,用当前值作为码元box的最大最小边界值 114 c.cb[c.numEntries]->min[n] = *(p+n); 115 } 116 c.cb[c.numEntries]->t_last_update = c.t; 117 c.cb[c.numEntries]->stale = 0;//因为刚建立,所有为0 118 c.numEntries += 1;//码元的个数加1 119 } 120 121 //SLOWLY ADJUST LEARNING BOUNDS 122 for(n=0; n<numChannels; n++)//每次遍历该像素点就将每个码元的学习最大阈值变大,最小阈值变小,但是都是缓慢变化的 123 { //如果是新建立的码元,则if条件肯定不满足 124 if(c.cb[i]->learnHigh[n] < high[n]) c.cb[i]->learnHigh[n] += 1; 125 if(c.cb[i]->learnLow[n] > low[n]) c.cb[i]->learnLow[n] -= 1; 126 } 127 128 return(i);//返回所找到码本中码元的索引 129 } 130 131 /////////////////////////////////////////////////////////////////////////////////// 132 // uchar cvbackgroundDiff(uchar *p, codeBook &c, int minMod, int maxMod) 133 // Given a pixel and a code book, determine if the pixel is covered by the codebook 134 // 135 // p pixel pointer (YUV interleaved) 136 // c codebook reference 137 // numChannels Number of channels we are testing 138 // maxMod Add this (possibly negative) number onto max level when code_element determining if new pixel is foreground 139 // minMod Subract this (possible negative) number from min level code_element when determining if pixel is foreground 140 // 141 // NOTES: 142 // minMod and maxMod must have length numChannels, e.g. 3 channels => minMod[3], maxMod[3]. 143 // 144 // Return 145 // 0 => background, 255 => foreground 146 uchar cvbackgroundDiff(uchar *p, codeBook &c, int numChannels, int *minMod, int *maxMod) 147 { 148 int matchChannel; 149 //SEE IF THIS FITS AN EXISTING CODEWORD 150 int i; 151 for(i=0; i<c.numEntries; i++) 152 { 153 matchChannel = 0; 154 for(int n=0; n<numChannels; n++) 155 { 156 if((c.cb[i]->min[n] - minMod[n] <= *(p+n)) && (*(p+n) <= c.cb[i]->max[n] + maxMod[n])) 157 { 158 matchChannel++; //Found an entry for this channel 159 } 160 else 161 { 162 break;//加快速度,当一个通道不满足时提前结束 163 } 164 } 165 if(matchChannel == numChannels) 166 { 167 break; //Found an entry that matched all channels,加快速度,当一个码元找到时,提前结束 168 } 169 } 170 if(i >= c.numEntries) return(255);//255代表前景,因为所有的码元都不满足条件 171 return(0);//0代表背景,因为至少有一个码元满足条件 172 } 173 174 175 //UTILITES///////////////////////////////////////////////////////////////////////////////////// 176 ///////////////////////////////////////////////////////////////////////////////// 177 //int clearStaleEntries(codeBook &c) 178 // After you've learned for some period of time, periodically call this to clear out stale codebook entries 179 // 180 //c Codebook to clean up 181 // 182 // Return 183 // number of entries cleared 184 int cvclearStaleEntries(codeBook &c)//对每一个码本进行检查 185 { 186 int staleThresh = c.t>>1;//阈值设置为访问该码元的次数的一半,经验值 187 int *keep = new int [c.numEntries]; 188 int keepCnt = 0; 189 //SEE WHICH CODEBOOK ENTRIES ARE TOO STALE 190 for(int i=0; i<c.numEntries; i++) 191 { 192 if(c.cb[i]->stale > staleThresh)//当在背景建模期间有一半的时间内,codebook的码元条目没有被访问,则该条目将被删除 193 keep[i] = 0; //Mark for destruction 194 else 195 { 196 keep[i] = 1; //Mark to keep,为1时,该码本的条目将被保留 197 keepCnt += 1;//keepCnt记录了要保持的codebook的数目 198 } 199 } 200 //KEEP ONLY THE GOOD 201 c.t = 0; //Full reset on stale tracking 202 code_element **foo = new code_element* [keepCnt];//重新建立一个码本的双指针 203 int k=0; 204 for(int ii=0; ii<c.numEntries; ii++) 205 { 206 if(keep[ii]) 207 { 208 foo[k] = c.cb[ii];//要保持该码元的话就要把码元结构体复制到fook 209 foo[k]->stale = 0; //We have to refresh these entries for next clearStale,不被访问的累加器stale重新赋值0 210 foo[k]->t_last_update = 0;// 211 k++; 212 } 213 } 214 //CLEAN UP 215 delete [] keep; 216 delete [] c.cb; 217 c.cb = foo; 218 int numCleared = c.numEntries - keepCnt;//numCleared中保存的是被删除码元的个数 219 c.numEntries = keepCnt;//最后新的码元数为保存下来码元的个数 220 return(numCleared);//返回被删除的码元个数 221 } 222 223 ///////////////////////////////////////////////////////////////////////////////// 224 //int countSegmentation(codeBook *c, IplImage *I) 225 // 226 //Count how many pixels are detected as foreground 227 // c Codebook 228 // I Image (yuv, 24 bits) 229 // numChannels Number of channels we are testing 230 // maxMod Add this (possibly negative) number onto max level when code_element determining if new pixel is foreground 231 // minMod Subract this (possible negative) number from min level code_element when determining if pixel is foreground 232 // 233 // NOTES: 234 // minMod and maxMod must have length numChannels, e.g. 3 channels => minMod[3], maxMod[3]. 235 // 236 //Return 237 // Count of fg pixels 238 // 239 int cvcountSegmentation(codeBook *c, IplImage *I, int numChannels, int *minMod, int *maxMod) 240 { 241 int count = 0,i; 242 uchar *pColor; 243 int imageLen = I->width * I->height; 244 245 //GET BASELINE NUMBER OF FG PIXELS FOR Iraw 246 pColor = (uchar *)((I)->imageData); 247 for(i=0; i<imageLen; i++) 248 { 249 if(cvbackgroundDiff(pColor, c[i], numChannels, minMod, maxMod))//对每一个像素点都要检测其是否为前景,如果是的话,计数器count就加1 250 count++; 251 pColor += 3; 252 } 253 return(count);//返回图像I的前景像素点的个数 254 } 255 256 257 /////////////////////////////////////////////////////////////////////////////////////////// 258 //void cvconnectedComponents(IplImage *mask, int poly1_hull0, float perimScale, int *num, CvRect *bbs, CvPoint *centers) 259 // This cleans up the forground segmentation mask derived from calls to cvbackgroundDiff 260 // 261 // mask Is a grayscale (8 bit depth) "raw" mask image which will be cleaned up 262 // 263 // OPTIONAL PARAMETERS: 264 // poly1_hull0 If set, approximate connected component by (DEFAULT) polygon, or else convex hull (0) 265 // perimScale Len = image (width+height)/perimScale. If contour len < this, delete that contour (DEFAULT: 4) 266 // num Maximum number of rectangles and/or centers to return, on return, will contain number filled (DEFAULT: NULL) 267 // bbs Pointer to bounding box rectangle vector of length num. (DEFAULT SETTING: NULL) 268 // centers Pointer to contour centers vectore of length num (DEFULT: NULL) 269 // 270 void cvconnectedComponents(IplImage *mask, int poly1_hull0, float perimScale, int *num, CvRect *bbs, CvPoint *centers) 271 { 272 static CvMemStorage* mem_storage = NULL; 273 static CvSeq* contours = NULL; 274 //CLEAN UP RAW MASK 275 //开运算作用:平滑轮廓,去掉细节,断开缺口 276 cvMorphologyEx( mask, mask, NULL, NULL, CV_MOP_OPEN, CVCLOSE_ITR );//对输入mask进行开操作,CVCLOSE_ITR为开操作的次数,输出为mask图像 277 //闭运算作用:平滑轮廓,连接缺口 278 cvMorphologyEx( mask, mask, NULL, NULL, CV_MOP_CLOSE, CVCLOSE_ITR );//对输入mask进行闭操作,CVCLOSE_ITR为闭操作的次数,输出为mask图像 279 280 //FIND CONTOURS AROUND ONLY BIGGER REGIONS 281 if( mem_storage==NULL ) mem_storage = cvCreateMemStorage(0); 282 else cvClearMemStorage(mem_storage); 283 284 //CV_RETR_EXTERNAL=0是在types_c.h中定义的,CV_CHAIN_APPROX_SIMPLE=2也是在该文件中定义的 285 CvContourScanner scanner = cvStartFindContours(mask,mem_storage,sizeof(CvContour),CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE); 286 CvSeq* c; 287 int numCont = 0; 288 while( (c = cvFindNextContour( scanner )) != NULL ) 289 { 290 double len = cvContourPerimeter( c ); 291 double q = (mask->height + mask->width) /perimScale; //calculate perimeter len threshold 292 if( len < q ) //Get rid of blob if it's perimeter is too small 293 { 294 cvSubstituteContour( scanner, NULL ); 295 } 296 else //Smooth it's edges if it's large enough 297 { 298 CvSeq* c_new; 299 if(poly1_hull0) //Polygonal approximation of the segmentation 300 c_new = cvApproxPoly(c,sizeof(CvContour),mem_storage,CV_POLY_APPROX_DP, CVCONTOUR_APPROX_LEVEL,0); 301 else //Convex Hull of the segmentation 302 c_new = cvConvexHull2(c,mem_storage,CV_CLOCKWISE,1); 303 cvSubstituteContour( scanner, c_new ); 304 numCont++; 305 } 306 } 307 contours = cvEndFindContours( &scanner ); 308 309 // PAINT THE FOUND REGIONS BACK INTO THE IMAGE 310 cvZero( mask ); 311 IplImage *maskTemp; 312 //CALC CENTER OF MASS AND OR BOUNDING RECTANGLES 313 if(num != NULL) 314 { 315 int N = *num, numFilled = 0, i=0; 316 CvMoments moments; 317 double M00, M01, M10; 318 maskTemp = cvCloneImage(mask); 319 for(i=0, c=contours; c != NULL; c = c->h_next,i++ ) 320 { 321 if(i < N) //Only process up to *num of them 322 { 323 cvDrawContours(maskTemp,c,CV_CVX_WHITE, CV_CVX_WHITE,-1,CV_FILLED,8); 324 //Find the center of each contour 325 if(centers != NULL) 326 { 327 cvMoments(maskTemp,&moments,1); 328 M00 = cvGetSpatialMoment(&moments,0,0); 329 M10 = cvGetSpatialMoment(&moments,1,0); 330 M01 = cvGetSpatialMoment(&moments,0,1); 331 centers[i].x = (int)(M10/M00); 332 centers[i].y = (int)(M01/M00); 333 } 334 //Bounding rectangles around blobs 335 if(bbs != NULL) 336 { 337 bbs[i] = cvBoundingRect(c); 338 } 339 cvZero(maskTemp); 340 numFilled++; 341 } 342 //Draw filled contours into mask 343 cvDrawContours(mask,c,CV_CVX_WHITE,CV_CVX_WHITE,-1,CV_FILLED,8); //draw to central mask 344 } //end looping over contours 345 *num = numFilled; 346 cvReleaseImage( &maskTemp); 347 } 348 //ELSE JUST DRAW PROCESSED CONTOURS INTO THE MASK 349 else 350 { 351 for( c=contours; c != NULL; c = c->h_next ) 352 { 353 cvDrawContours(mask,c,CV_CVX_WHITE, CV_CVX_BLACK,-1,CV_FILLED,8); 354 } 355 } 356 }
三、2种算法进行对比。
Learning Opencv的作者将这两种算法做了下对比,用的视频是有风吹动树枝的动态背景,一段时间过后的前景是视频中移动的手。
当然在这个工程中,作者除了体现上述简单背景差法和codobook算法的一些原理外,还引入了很多细节来优化前景分割效果。比如说误差计算时的方差和协方差计算加速方法,消除像素点内长时间没有被访问过的码元,对检测到的粗糙原始前景图用连通域分析法清楚噪声,其中引入了形态学中的几种操作,使用多边形拟合前景轮廓等细节处理。
在看作者代码前,最好先看下下面几个变量的物理含义。
maxMod[n]:用训练好的背景模型进行前景检测时用到,判断点是否小于max[n] + maxMod[n])。
minMod[n]:用训练好的背景模型进行前景检测时用到,判断点是否小于min[n] -minMod[n])。
cbBounds*:训练背景模型时用到,可以手动输入该参数,这个数主要是配合high[n]和low[n]来用的。
learnHigh[n]:背景学习过程中当一个新像素来时用来判断是否在已有的码元中,是阈值的上界部分。
learnLow[n]:背景学习过程中当一个新像素来时用来判断是否在已有的码元中,是阈值的下界部分。
max[n]: 背景学习过程中每个码元学习到的最大值,在前景分割时配合maxMod[n]用的。
min[n]: 背景学习过程中每个码元学习到的最小值,在前景分割时配合minMod[n]用的。
high[n]:背景学习过程中用来调整learnHigh[n]的,如果learnHigh[n]<high[n],则learnHigh[n]缓慢加1
low[n]: 背景学习过程中用来调整learnLow[n]的,如果learnLow[n]>Low[n],则learnLow[缓慢减1
该工程带主函数部分代码和注释如下:
#include "stdafx.h" #include "cv.h" #include "highgui.h" #include <stdio.h> #include <stdlib.h> #include <ctype.h> #include "avg_background.h" #include "cv_yuv_codebook.h" //VARIABLES for CODEBOOK METHOD: codeBook *cB; //This will be our linear model of the image, a vector //of lengh = height*width int maxMod[CHANNELS]; //Add these (possibly negative) number onto max // level when code_element determining if new pixel is foreground int minMod[CHANNELS]; //Subract these (possible negative) number from min //level code_element when determining if pixel is foreground unsigned cbBounds[CHANNELS]; //Code Book bounds for learning bool ch[CHANNELS]; //This sets what channels should be adjusted for background bounds int nChannels = CHANNELS; int imageLen = 0; uchar *pColor; //YUV pointer void help() { printf("\nLearn background and find foreground using simple average and average difference learning method:\n" "\nUSAGE:\n ch9_background startFrameCollection# endFrameCollection# [movie filename, else from camera]\n" "If from AVI, then optionally add HighAvg, LowAvg, HighCB_Y LowCB_Y HighCB_U LowCB_U HighCB_V LowCB_V\n\n" "***Keep the focus on the video windows, NOT the consol***\n\n" "INTERACTIVE PARAMETERS:\n" "\tESC,q,Q - quit the program\n" "\th - print this help\n" "\tp - pause toggle\n" "\ts - single step\n" "\tr - run mode (single step off)\n" "=== AVG PARAMS ===\n" "\t- - bump high threshold UP by 0.25\n" "\t= - bump high threshold DOWN by 0.25\n" "\t[ - bump low threshold UP by 0.25\n" "\t] - bump low threshold DOWN by 0.25\n" "=== CODEBOOK PARAMS ===\n" "\ty,u,v- only adjust channel 0(y) or 1(u) or 2(v) respectively\n" "\ta - adjust all 3 channels at once\n" "\tb - adjust both 2 and 3 at once\n" "\ti,o - bump upper threshold up,down by 1\n" "\tk,l - bump lower threshold up,down by 1\n" ); } // //USAGE: ch9_background startFrameCollection# endFrameCollection# [movie filename, else from camera] //If from AVI, then optionally add HighAvg, LowAvg, HighCB_Y LowCB_Y HighCB_U LowCB_U HighCB_V LowCB_V // int main(int argc, char** argv) { IplImage* rawImage = 0, *yuvImage = 0; //yuvImage is for codebook method IplImage *ImaskAVG = 0,*ImaskAVGCC = 0; IplImage *ImaskCodeBook = 0,*ImaskCodeBookCC = 0; CvCapture* capture = 0; int startcapture = 1; int endcapture = 30; int c,n; maxMod[0] = 3; //Set color thresholds to default values minMod[0] = 10; maxMod[1] = 1; minMod[1] = 1; maxMod[2] = 1; minMod[2] = 1; float scalehigh = HIGH_SCALE_NUM;//默认值为6 float scalelow = LOW_SCALE_NUM;//默认值为7 if(argc < 3) {//只有1个参数或者没有参数时,输出错误,并提示help信息,因为该程序本身就算进去了一个参数 printf("ERROR: Too few parameters\n"); help(); }else{//至少有2个参数才算正确 if(argc == 3){//输入为2个参数的情形是从摄像头输入数据 printf("Capture from Camera\n"); capture = cvCaptureFromCAM( 0 ); } else {//输入大于2个参数时是从文件中读入视频数据 printf("Capture from file %s\n",argv[3]);//第三个参数是读入视频文件的文件名 // capture = cvCaptureFromFile( argv[3] ); capture = cvCreateFileCapture( argv[3] ); if(!capture) { printf("Couldn't open %s\n",argv[3]); return -1;}//读入视频文件失败 } if(isdigit(argv[1][0])) { //Start from of background capture startcapture = atoi(argv[1]);//第一个参数表示视频开始的背景训练时的帧,默认是1 printf("startcapture = %d\n",startcapture); } if(isdigit(argv[2][0])) { //End frame of background capture endcapture = atoi(argv[2]);//第二个参数表示的结束背景训练时的,默认为30 printf("endcapture = %d\n"); } if(argc > 4){ //See if parameters are set from command line,输入多于4个参数表示后面的算法中用到的参数在这里直接输入 //FOR AVG MODEL if(argc >= 5){ if(isdigit(argv[4][0])){ scalehigh = (float)atoi(argv[4]); } } if(argc >= 6){ if(isdigit(argv[5][0])){ scalelow = (float)atoi(argv[5]); } } //FOR CODEBOOK MODEL, CHANNEL 0 if(argc >= 7){ if(isdigit(argv[6][0])){ maxMod[0] = atoi(argv[6]); } } if(argc >= 8){ if(isdigit(argv[7][0])){ minMod[0] = atoi(argv[7]); } } //Channel 1 if(argc >= 9){ if(isdigit(argv[8][0])){ maxMod[1] = atoi(argv[8]); } } if(argc >= 10){ if(isdigit(argv[9][0])){ minMod[1] = atoi(argv[9]); } } //Channel 2 if(argc >= 11){ if(isdigit(argv[10][0])){ maxMod[2] = atoi(argv[10]); } } if(argc >= 12){ if(isdigit(argv[11][0])){ minMod[2] = atoi(argv[11]); } } } } //MAIN PROCESSING LOOP: bool pause = false; bool singlestep = false; if( capture ) { cvNamedWindow( "Raw", 1 );//原始视频图像 cvNamedWindow( "AVG_ConnectComp",1);//平均法连通区域分析后的图像 cvNamedWindow( "ForegroundCodeBook",1);//codebook法后图像 cvNamedWindow( "CodeBook_ConnectComp",1);//codebook法连通区域分析后的图像 cvNamedWindow( "ForegroundAVG",1);//平均法后图像 int i = -1; for(;;) { if(!pause){ // if( !cvGrabFrame( capture )) // break; // rawImage = cvRetrieveFrame( capture ); rawImage = cvQueryFrame( capture ); ++i;//count it // printf("%d\n",i); if(!rawImage) break; //REMOVE THIS FOR GENERAL OPERATION, JUST A CONVIENIENCE WHEN RUNNING WITH THE SMALL tree.avi file if(i == 56){//程序开始运行几十帧后自动暂停,以便后面好手动调整参数 pause = 1; printf("\n\nVideo paused for your convienience at frame 50 to work with demo\n" "You may adjust parameters, single step or continue running\n\n"); help(); } } if(singlestep){ pause = true; } //First time: if(0 == i) { printf("\n . . . wait for it . . .\n"); //Just in case you wonder why the image is white at first //AVG METHOD ALLOCATION AllocateImages(rawImage);//为算法的使用分配内存 scaleHigh(scalehigh);//设定背景建模时的高阈值函数 scaleLow(scalelow);//设定背景建模时的低阈值函数 ImaskAVG = cvCreateImage( cvGetSize(rawImage), IPL_DEPTH_8U, 1 ); ImaskAVGCC = cvCreateImage( cvGetSize(rawImage), IPL_DEPTH_8U, 1 ); cvSet(ImaskAVG,cvScalar(255)); //CODEBOOK METHOD ALLOCATION: yuvImage = cvCloneImage(rawImage); ImaskCodeBook = cvCreateImage( cvGetSize(rawImage), IPL_DEPTH_8U, 1 );//用来装前景背景图的,当然只要一个通道的图像即可 ImaskCodeBookCC = cvCreateImage( cvGetSize(rawImage), IPL_DEPTH_8U, 1 ); cvSet(ImaskCodeBook,cvScalar(255)); imageLen = rawImage->width*rawImage->height; cB = new codeBook [imageLen];//创建一个码本cB数组,每个像素对应一个码本 for(int f = 0; f<imageLen; f++) { cB[f].numEntries = 0;//每个码本的初始码元个数赋值为0 } for(int nc=0; nc<nChannels;nc++) { cbBounds[nc] = 10; //Learning bounds factor,初始值为10 } ch[0] = true; //Allow threshold setting simultaneously for all channels ch[1] = true; ch[2] = true; } //If we've got an rawImage and are good to go: if( rawImage ) { cvCvtColor( rawImage, yuvImage, CV_BGR2YCrCb );//YUV For codebook method //This is where we build our background model if( !pause && i >= startcapture && i < endcapture ){ //LEARNING THE AVERAGE AND AVG DIFF BACKGROUND accumulateBackground(rawImage);//平均法累加过程 //LEARNING THE CODEBOOK BACKGROUND pColor = (uchar *)((yuvImage)->imageData);//yuvImage矩阵的首位置 for(int c=0; c<imageLen; c++) { cvupdateCodeBook(pColor, cB[c], cbBounds, nChannels);//codebook算法建模过程 pColor += 3; } } //When done, create the background model if(i == endcapture){ createModelsfromStats();//平均法建模过程 } //Find the foreground if any if(i >= endcapture) {//endcapture帧后开始检测前景 //FIND FOREGROUND BY AVG METHOD: backgroundDiff(rawImage,ImaskAVG); cvCopy(ImaskAVG,ImaskAVGCC); cvconnectedComponents(ImaskAVGCC);//平均法中的前景清除 //FIND FOREGROUND BY CODEBOOK METHOD uchar maskPixelCodeBook; pColor = (uchar *)((yuvImage)->imageData); //3 channel yuv image uchar *pMask = (uchar *)((ImaskCodeBook)->imageData); //1 channel image for(int c=0; c<imageLen; c++) { maskPixelCodeBook = cvbackgroundDiff(pColor, cB[c], nChannels, minMod, maxMod);//前景返回255,背景返回0 *pMask++ = maskPixelCodeBook;//将前景检测的结果返回到ImaskCodeBook中 pColor += 3; } //This part just to visualize bounding boxes and centers if desired cvCopy(ImaskCodeBook,ImaskCodeBookCC); cvconnectedComponents(ImaskCodeBookCC);//codebook算法中的前景清除 } //Display cvShowImage( "Raw", rawImage );//除了这张是彩色图外,另外4张都是黑白图 cvShowImage( "AVG_ConnectComp",ImaskAVGCC); cvShowImage( "ForegroundAVG",ImaskAVG); cvShowImage( "ForegroundCodeBook",ImaskCodeBook); cvShowImage( "CodeBook_ConnectComp",ImaskCodeBookCC); //USER INPUT: c = cvWaitKey(10)&0xFF; //End processing on ESC, q or Q if(c == 27 || c == 'q' | c == 'Q') break; //Else check for user input switch(c) { case 'h': help(); break; case 'p': pause ^= 1; break; case 's': singlestep = 1; pause = false; break; case 'r': pause = false; singlestep = false; break; //AVG BACKROUND PARAMS case '-'://调整scalehigh的参数,scalehigh的物理意义是误差累加的影响因子,其倒数为缩放倍数,加0.25实际上是减小其影响力 if(i > endcapture){ scalehigh += 0.25; printf("AVG scalehigh=%f\n",scalehigh); scaleHigh(scalehigh); } break; case '='://scalehigh减少2.5是增加其影响力 if(i > endcapture){ scalehigh -= 0.25; printf("AVG scalehigh=%f\n",scalehigh); scaleHigh(scalehigh); } break; case '[': if(i > endcapture){//设置设定背景建模时的低阈值函数,同上 scalelow += 0.25; printf("AVG scalelow=%f\n",scalelow); scaleLow(scalelow); } break; case ']': if(i > endcapture){ scalelow -= 0.25; printf("AVG scalelow=%f\n",scalelow); scaleLow(scalelow); } break; //CODEBOOK PARAMS case 'y': case '0'://激活y通道 ch[0] = 1; ch[1] = 0; ch[2] = 0; printf("CodeBook YUV Channels active: "); for(n=0; n<nChannels; n++) printf("%d, ",ch[n]); printf("\n"); break; case 'u': case '1'://激活u通道 ch[0] = 0; ch[1] = 1; ch[2] = 0; printf("CodeBook YUV Channels active: "); for(n=0; n<nChannels; n++) printf("%d, ",ch[n]); printf("\n"); break; case 'v': case '2'://激活v通道 ch[0] = 0; ch[1] = 0; ch[2] = 1; printf("CodeBook YUV Channels active: "); for(n=0; n<nChannels; n++) printf("%d, ",ch[n]); printf("\n"); break; case 'a': //All case '3'://激活所有通道 ch[0] = 1; ch[1] = 1; ch[2] = 1; printf("CodeBook YUV Channels active: "); for(n=0; n<nChannels; n++) printf("%d, ",ch[n]); printf("\n"); break; case 'b': //both u and v together ch[0] = 0; ch[1] = 1; ch[2] = 1; printf("CodeBook YUV Channels active: "); for(n=0; n<nChannels; n++) printf("%d, ",ch[n]); printf("\n"); break; case 'i': //modify max classification bounds (max bound goes higher) for(n=0; n<nChannels; n++){//maxMod和minMod是最大值和最小值跳动的阈值 if(ch[n]) maxMod[n] += 1; printf("%.4d,",maxMod[n]); } printf(" CodeBook High Side\n"); break; case 'o': //modify max classification bounds (max bound goes lower) for(n=0; n<nChannels; n++){ if(ch[n]) maxMod[n] -= 1; printf("%.4d,",maxMod[n]); } printf(" CodeBook High Side\n"); break; case 'k': //modify min classification bounds (min bound goes lower) for(n=0; n<nChannels; n++){ if(ch[n]) minMod[n] += 1; printf("%.4d,",minMod[n]); } printf(" CodeBook Low Side\n"); break; case 'l': //modify min classification bounds (min bound goes higher) for(n=0; n<nChannels; n++){ if(ch[n]) minMod[n] -= 1; printf("%.4d,",minMod[n]); } printf(" CodeBook Low Side\n"); break; } } } cvReleaseCapture( &capture ); cvDestroyWindow( "Raw" ); cvDestroyWindow( "ForegroundAVG" ); cvDestroyWindow( "AVG_ConnectComp"); cvDestroyWindow( "ForegroundCodeBook"); cvDestroyWindow( "CodeBook_ConnectComp"); DeallocateImages();//释放平均法背景建模过程中用到的内存 if(yuvImage) cvReleaseImage(&yuvImage); if(ImaskAVG) cvReleaseImage(&ImaskAVG); if(ImaskAVGCC) cvReleaseImage(&ImaskAVGCC); if(ImaskCodeBook) cvReleaseImage(&ImaskCodeBook); if(ImaskCodeBookCC) cvReleaseImage(&ImaskCodeBookCC); delete [] cB; } else{ printf("\n\nDarn, Something wrong with the parameters\n\n"); help(); } return 0; }
运行结果截图如下:
训练过程视频原图截图:

测试过程视频原图截图:

前景检测过程截图:
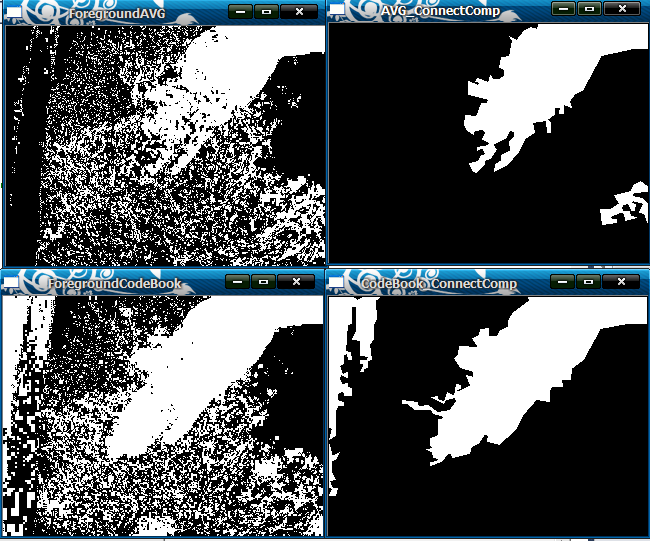
可以看到左边2幅截图的对比,codebook算法的效果明显比简单减图法要好,手型比较清晰些。
四、参考文献
Bradski, G. and A. Kaehler (2008). Learning OpenCV: Computer vision with the OpenCV library, O'Reilly Media.