An Introduction to Variational Methods
转自: http://hi.baidu.com/zentopus/item/a91a1ef042b7cd2c743c4c88
这一系列的文章,用以对Variational Methods(变分法),做一个粗浅的入门介绍,主要的描述和依据来源于Bishop的书《pattern recognition and machine learning》 和 Jordan的书《graphical models exponential families and variational inference》,有兴趣的同学可以自行深入研究。
我预先假设读者有一定的数学知识,包括微积分,概率等基本的知识。并且,讨论的基础是概率图模型,我也假设读者在这一方面具有一定的基础知识。
在计算机科学中,图论(Graph theory)在很多计算领域有很重要的意义。除了用以建模之外,图论在理解计算复杂度等方面也有很重要的意义。特别的,一些算法的计算复杂度或者是其误差的范围,可以利用图的结构来进行阐述。
图论的这些性质,在图模型中也适用。例如,我们所知道的基本的图模型算法,Junction Tree Algorithm (这不是一个算法,而是一类算法),可以看做用变量构成的图之中的一些迭代过程。对于稀疏的图,该类算法提供了一种有效的计算似然值等统计量的好的算法。
然而,我们也知道,并不是很多的问题都是足够稀疏。所以Junction Tree Algorithm 无法再提供更多的帮助。这时候我们可以求助一类方法,称作 Markov Chain Monte Carlo (MCMC) Framework, 这是一组抽样方法,比较常见的有吉布斯抽样等等方法。这类方法,在其理论上,如果有足够的计算资源和足够多的样本,是可以无限接近真实结果的,而其无法达到真实结果的原因,是因为没有无限的计算资源。这是一种在结构上准确,在计算上进行近似的方法。
除此之外,我们还可以去利用另外一种近似方法,称作variational methods(变分法)。这也是我在这一系列文章中将重点讨论的方法。这种方法可以结合指数家族一起使用,能够得到很好的效果。这种方法的本质上,是一种结构上的近似,利用原本不可分析的结构,将其在结构上,利用一些可分解的结构进行代替和近似,而后进行求解。
变分法本身,也是多种近似求解方法的总称,而不是某种特定的算法。其本质上,可以看做是一种优化问题。我们将需要求解的问题表述为一个优化问题,而后在一定条件下,利用变分法将这个问题“relax”,从而进行求解。
最后稍微提及一下,MCMC和变分法,都是有很强的物理基础,其在统计物理中的应用,更早于在CS中的应用。对于这两种方法,UC Berkeley的Jordan,以及UoE的Bishop都有很好的著作进行了比较详尽的描述。
我们知道,很多问题都可以转化成为一个优化问题,在一个优化问题里,我们一般的做法,是利用某些方法,在整个space进行搜索,从而找到我们所希望的解,这种思想在很多领域都很常见。而我们所利用的变分法,可以看做是在这个基础上进行的一种对于优化问题求解的方式。
其基本的想法是,我们不在整个空间中去寻求结果,而是在一个限定的范围内进行求解。例如,我们只考虑针对二阶形式的多项式函数进行求解,或者是我们将解的形式限定为一系列基函数(basis functions)的线性组合,而我们所控制的变量就是其组合的系数。而对于概率推论中,我们可以将这种限定的形式表现为,对需要优化的分布选择一种特定形式的分解,利用这样一种假设,我们来获取优化问题的近似解。这和我在系列(1)中所提到的是相互吻合的,我们要做的,是一种结构上的近似,而其后的推论是直接的。而MCMC是一种结构上的完全拟合,而是在求解过程中,因为无法获得无限计算资源而产生的一种近似。
我们现在来深入考虑这个问题,假设我们有一个完全的Bayesian Model,即所有的参数都有一个先验分布。假设所有的潜在变量都用Z表示,可观测变量用X表示。现在给定一个数据集,并且所有的数据点都是i.i.d的。我们的模型能够描述联合分布p(X,Z),而我们的目标是为了找出后验分布P(Z|X),以及Model Evidence P(X)。 进一步的,我们将边缘似然值进行分解,得到:
其中,我们定义了:
![]()
![]()
需要提及的一点是,并不是整个模型当中,对于各种分布没有其本身的参数,例如我们在Linear Gaussian System假设Z本身符合一个Gaussian分布,其需要有参数均值和方差。这些参数,因为我们有一个假设是整个模型为完全的Bayesian Model,所以这些参数都是随机变量,而可以规划到Z之中去了。
因为KL-Divergence始终是非负的,所以,我们为边缘似然值找到了一个下界。而我们优化的方法就是提升下界从而达到优化的目的。这也等价于最小化KL-Divergence。如果我们允许q(Z)有无限种的选择的话,即我们可以在整个空间当中为其确定函数形式,那么下界最大化的时候,就等价于KL-Divergence为0的时候。这时候,我们有q(Z) = p(Z|X)。
问题在于,如果后验是Intractable的,我们该如何控制q(Z),来使得KL-Divergence最小化。所以,我们在此限制了q(Z)的选择范围,我们仅允许其在一组受限的tractable distributions中进行选择。并且,对于这一组分布,我们需要其足够灵活,从而能够更好地近似后验分布。并且,灵活的模型能够从一定程度上避免过拟合的问题。有一种很直观的限制这种分布的想法,利用一组参数w来控制所有的潜在变量,即引入p(Z|w),从而,下界会成为w的一个函数,而后我们可以利用标准的非线性方法来进行优化,获取w。
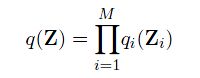
这种方法十分直观,但是这个方法并不是我们在这里需要讨论的。我们用另外一种方法,来约束q(Z)的范围。假设,我们可以将Z进行分组,分成M组,并且,我们认为,q(Z)可以依赖这个分组进行分解,得到:
![]()
这就是Variational Methods的一个基础,关于细节,我在下一节中进行讨论。
在之前讨论到,在变分法中,我们假设分布存在一种可以分解的形式作为其近似,并且约束分布分解的形式,其必须是tractable和灵活的。我们所做的假设是,将潜在变量Z进行分组,分成M组,并且,我们认为,q(Z)可以依赖这个分组进行分解,得到:
需要强调的是,我们不需要对分布做更多的假设了,特别的,我们对每一个分解得到的因子![]() 不做任何函数形式上的限制。这种分解的框架,在物理学中有其广泛的应用,对应的框架称作mean field theory。
不做任何函数形式上的限制。这种分解的框架,在物理学中有其广泛的应用,对应的框架称作mean field theory。
现在,我们寻求一种分布,从而使得L(q)最大化。因而,我们希望针对q(Z)的分解得到的子分布的每一个部分,都进行优化,从而得到全局的优化。我们将分解的形式代入原本的L(q)中,可以得到:
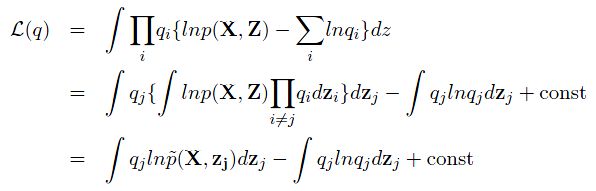
这其中,我们定义了一个新的分布:

其中的期望为:

现在,如果我们保持所有的不变,只是单纯地调整qj,我们就可以在可控的情况下,逐步最大化L(q)。而从L(q)最终的分解式中,我们又可以发现,我们得到了一个新的KL-Divergence,是![]() 和
和![]() 之间的KL距离。从而我们获得了关于优化解的一个一般形式:
之间的KL距离。从而我们获得了关于优化解的一个一般形式:
从这个式子中,我们看出,对于单个因子的优化解,是有所有潜在变量和可观测变量的联合分布的似然值,对于所有其他潜在变量求期望而得。不过,我们从这个式子当中还不能看出完整的求解过程。实际在,在真实的应用中,我们会寻求一种迭代的求解方式,首先初始化所有的因子分布,而后固定其余的,依次优化每一个,直至收敛为止。值得提及的一点是,因为每一个因子分布都是convex函数,故可以保证其收敛性。
我们之前已经简单讨论了Variational Methods,我在这里将会简单地讨论一下它的性质。
我们在系列(3)的最后,给出了对于q(Z)的解的一般优化形式:
我们注意到,求解任何一个部分,都需要利用到另外的其余所有变量保持不变,我们在实际应用中,每次只变动一个变量,依次不断更新。可以将这一个过程想象成为,在一个旋转的阶梯上不断向上移动的过程:每次都只能上一个台阶,而一个圆周上的台阶数量是固定的。当完成一周之后,你回到原本的台阶的上方,而后继续重复这样一个过程,直至到达顶部为止。虽然不准确,但是这样的想象过程和我们的近似求解过程有一定的相似之处。
我们在之前的过程中,求解的是KL(q||p),我们不禁会问,如果我们选择KL(p||q)这样一个距离,会出现什么样的结果呢。事实上,这会导致一个非常接近的框架,在Machine Learning的术语中,我们会得到一种在图模型中求解近似解的方法,称作expectation propagation.
如果我们选择最小化KL(p||q),则在一般的情况下,我们依然可以将q(Z)进行分解,得到:
代入新的KL-Divergence,我们会得到:
其中的常数不依赖于p(z),我们可以引入拉格朗日乘数来优化这个式子,从而得到以下的解:
在这样的情况下,我们发现q(Z)每个分解因子的优化解,就为其对应的p(Z)的部分,并且这是一个闭型解,不需要进行迭代求解。
如果我们将这两种不同的方法应用于同一个问题,我们会得到什么样的结果呢,我们可以看图 1。
从图中我们可以明显的发现,这两种方法都准确地找到了需要近似的函数的均值,但是两者在对方差进行描述的时候,都出现了一定的误差。也就是说,两种方法在把握概率密度的时候,都不能够做得非常准确。那么,出现这两者差异的原因是什么呢?为了解释这个问题,我们再看一下KL(q||p)到底是什么:
![]()
注意这个式子,如果p(Z)不趋近于0,q(Z)是不会趋近于0的,也就是说,q(Z)会自动地避免p(Z)密度低的地方。这样的话,就会得到图\ref{EpVsVm}中(a)的那样,我们发现近似结果对于原分布中为0的地方是无法发现的。而如果我们利用相反的KL-Divergence,则我们会得到相反的结果。为了使得KL(p||q)最小化,q(Z)会在p(Z)不为0的地方也取0,从而使得式子最小。
在实际的应用中,我们并不是总是应对单峰的分布,对于多峰的分布,如果我们最小化KL(q||p),则根据初始值的不同,一般会找到其中一个最优值。而如果我们选择最小化KL(p||q)的话,一般会将分布进行平均的分配,这样的结果是非常不利于进行预测的。所以,为了要应用之一方案,我们需要作出调整,那将会得到expectation propagation的算法。这已经超出了这一系列文章的范围,我就不多做讨论了。我们可以从图2中得到一些直观的感受。
其实,这两种距离都是alpha-family距离中的一员,其定义为:

特别的,当alpha为0的时候,我们会得到一种对称的距离,称作Hellinger Distance:

本文中的两幅图,都来源于Bishop的大作Pattern Recognition and Machine Learning
在这篇文章中,我引用Bishop书中的一个例子,来简单介绍一下Variational Methods的应用。想要更详细地理解这个例子,可以参考Bishop的书Pattern Recongnition and Machine Learning的第十章。
这个例子应用于一个混合高斯分布,我们先来看一看这个混合高斯分布的图模型,见图3,从而可以进一步退出其概率表达式。
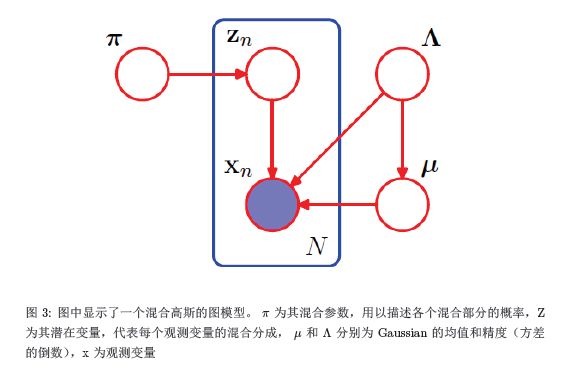
现在我们有了这个图,我们就不难写下一个完整的概率式来表示整个联合分布:
![]()
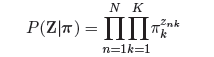
现在,我们来定义一些分布。首先,我们已经说过,这是一个混合高斯模型,那么就需要有一个变量来描述,一个点的生成,到底是由这个混合高斯中的哪一个组成部分生成。那么这个变量就是Z,我们用一个1-of-K的二进制向量来表示。例如我现在有一个二进制向量(0,0,0,0,1),这个向量代表一共有五个组成部分,而这个点对应于其中的第五个组成部分。这就是一个multinational distribution。那么我们现在要来控制这个multinational distribution,那就需要利用到pi。现在我们假设有N个观测变量构成的数据集,每一个观测变量都对应其潜在变量。我们可以得到:
在这里, 我们假定,在这个高斯混合中,一共有K个组成部分。现在,我们需要写出观测变量基于潜在变量的条件分布。
现在,我们可以引入分布来描述这些参数,从而构成一个完整的Bayesian Model。首先,我们来描述pi。我们注意到Z是一个由pi控制的multinational distribution,那么根据其共轭先验,我们可以方便地选择Dirichlet distribution作为pi的先验分布,从而我们有:

在这个式子中,我们将Dirichlet分布做了一个简化,其控制参数,我们减少为一个。关于Dirichlet分布的介绍可以看我另外一篇文章Simple Introduction to Dirichlet Process。现在我们需要为Gaussian的均值和方差引入一个控制先验。从我们之前的图模型中,我们发现了均值对精度的依赖(这并不是必须的)。在均值和精度都不知晓的情况下,我们可以为这两个参数引入一个Gaussian-Wishart先验分布,这是在对于高斯分布的两个控制参数均不了解的情况下其共轭先验。从而我们有:
现在,整个问题就完全定义了,接下来就是如何利用Variational Methods来解决这个问题。
首先,回忆一下在Variational Methods里,我们是如何实现近似的。对,我们是利用一种结构上的近似,也就是假设我们现在想要求的分布,可以分解为一系列tractable的分布,从而进行近似于求解。在给定的现在这样一个完全Bayesian Model中,我们选择一种分解方式,来将原有的结构进行分解近似。从而我们得到:
![]()
这是一种合理的假设,我们将潜在变量和控制参数分开,从而得到这样的一种分解。这里有几点值得说明:首先,我在前面的文章中提到,我们是将Z分解为几组,从而得到近似模型。那为什么这里除了Z之外,还有别的变量?这是因为,当时我用Z代替的了所有的变量,当时的Z之中包含了控制参数,因为这是一个完全的Bayesian Model。第二个要注意的是,这个分解的假设,是我们在这个例子中作出的唯一假设了。
现在,我们利用之前得到的公式,将现在的这个式子代入,我们可以得到:
![]()
而后,我们利用最初根据图模型得到的那个全概率分解形式,可以对上面的式子进行简化,并且将于Z无关的式子都放入常数中,从而得到:
接下来,我们就可以将上面式子中提到的两个分布分别代入,分别可以得到:
以及

我们注意到,这两个式子有相同的部分,为了使得表达更加简洁,我们引入一个新的符号:
![]()
从而我们有:
在这个式子的基础上,我们等式两边同时取对数,则我们得到:
这个分布还是没有归一化的,所以我们需要进行归一化,则我们定义:
从而对该分布进行归一化,得到最终的关于Z的分布:
其余参数的近似,我将会在下一篇文章中继续讨论。
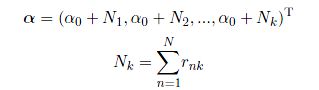
我们现在已经得到了关于潜在变量Z的优化分布的表达形式:
其中:
所以现在我们可以得到Z的期望:
另外对于Z还值得一提的是,我们从其优化分布的表达式中可以看出,各个Z的组成部分之间还是相互耦合的,所以需要一个迭代的求解方式。
解决了关于Z的一些遗留的问题,我们可以继续讨论如何求解余下的参数。同样的,我们的基本想法,还是将其带入我们之前所求到的公式中去,从而,我们有:

现在,我们回头去观察一下这个混合高斯分布的图模型,我们会发现,在控制变量中,本身存在一个独立性,即:
从而,在近似模型中,我们有:
于是,我们从这些参数的优化表达式中,分别提取出只关于部分参数的式子,进行进一步优化,即:
现在,我们对上式两边同时求指数运算,则:
看到这个形式是不是觉得非常熟悉呢?没错,这是一个Dirichlet分布的标准形式,从而我们可以得到关于pi的优化分布:
![]()
其中
我们现在可以开始讨论最后两个参数了。虽然我们知道余下的两个参数之间有依赖关系,从而不能分解成为两个边缘分布的乘积,但是我们依然可以根据product-rule将其分解成为:
现在,我们从之前的求解式中将只含有这两个变量的部分提取出来,于是我们得到:
观察这个式子,我们发现其实对于K组参数,这个式子都是同样的,所以我们可以单独只考虑其中一组变量:

我们对两边同时进行指数运算,则有:

现在我们来分别看看这些分布的形式:

其中,B是Wishart分布的归一化常数

其中:

我们注意上面这个式子,它的指数部分,展开之后,可以得到:
![]()
观察这个式子,我们发现,其中关于mu的二阶式和一阶式,也就是上面这个式子的前三项,和mu本身的分布合并,可以化归成为一个新的Gaussian分布;而上面式子的最后一项,则可以被Lambda的Wishart分布所吸收合并,成为一个新的Wishart分布。这样,我们就找到了这两个参数的分布形式,他们是一个新的Gassian-Wishart分布:
其中,定义了:
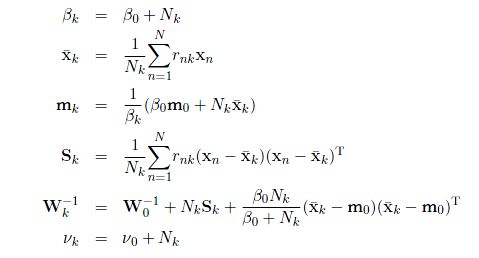
从之前的文章中,我们已经得到了所有需要求解的参数的优化分布的形式,分别为:
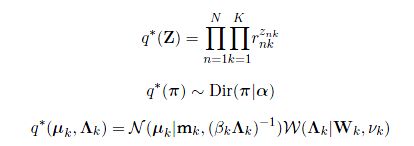
但是,我们从这些分布的表达式中(参见之前的文章),可以发现这些式子并不能够直接求解。这是因为各个参数之间相互耦合,从而导致得到的不是一个直接可以得到的解,所以我们需要进行迭代求解,正如我们在之前所描述的一样。我们观察这三组参数的表达形式,我们会发现,Z的求解依赖于r这个变量,而r这个变量的求解依赖于其余的所有参数。我们再看其他的参数,这些参数的求解依赖于r。从而我们得到了这个求解过程中的耦合部分。所以我们可以得到一个初步的求解迭代过程:
1. 初始化所有的参数,包括Z,r,pi,mu,Lambda等控制参数以及其超参数;
2. 保持pi,mu,Lambda等控制参数不变,根据表达式,求解r,进而求解Z。
3. 保持r和Z不变,根据表达式求解pi,mu,Lambda等控制参数。
如此不断往复,直至结果达到收敛精度要求或者超过一定迭代次数为止。
到这一步,我们可以基本认为,这个问题得到了解决。但是其中还有很多细节,我并没有在文中给予详细的解答,对于迭代过程的求解,也并不是一句话就可以带过的。
我们现在回头再去观察这个问题,我们会发现一个有趣的地方。那就是我们所求解的优化分布的形式,和我们所提出来的prior的形式是完全相同的。这是一个偶然现象,还是必然呢?答案是,在这个问题中,这是一种必然的过程,这是因为 我们选择的就是所希望求解分布的共轭先验(conjugate prior)。我简单解释一下这个概念:
对于一个给定的分布p(X|W),我们可以寻找其一个先验分布p(W),使得该先验和似然函数的乘积与先验分布有相同的函数形式,而我们知道,后验分布p(W|X)正比于先验和似然函数的乘积,从而与先验有相同的函数形式。
这样一个共轭先验的好处,是使得我们可以不断地重复先验转向后验的过程,使得我们可以不断利用已有的数据去理解新的数据,而后将它们放在一起,都作为已有的数据,再去理解新的数据,如此不断往复。而且共轭先验的函数形式也让数学形式上的分析变得更为容易,我们可以只需要考虑整个分布的一些重要的有特征的部分,而不需要对于其归一化常数等不重要的部分进行多次计算,只需要最后的时候根据函数形式进行对应就可以了。
而一个有意思的地方在于,对于指数家族函数的分布来说,每一个都存在一个对应的共轭先验,我简单介绍一下,对于形式为如下的分布,都可以成为指数家族分布:
![]()
x可以为标量,也可以为矢量。u(x)为x的某种形式a的函数,而eta称作natural parameters,其函数g(eta)可以看做是一个归一化系数。
现在,我们为参数引入一个先验:
而我们给定一个数据集,也可以计算其似然值:

其中
![]()
这样,我们将先验和似然函数相乘,可以得到:

而这个函数,与先验函数具有相同的函数形式。这时候,我们就找到了一个共轭先验。而我们的原函数,是指数家族函数分布的一般形式,这也就意味着,每一个指数家族函数分布,都有其对应的共轭先验。