opencv 实践 图片数据的合格检验
测试图片:
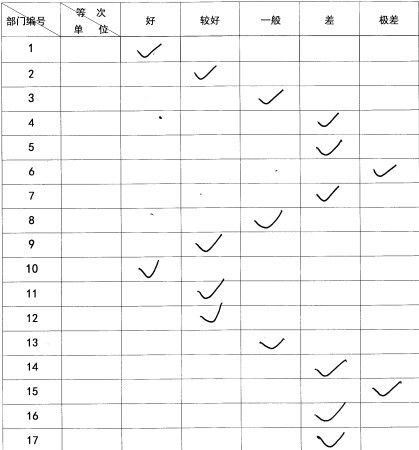
code:
#include <opencv\cv.h>
#include <opencv\highgui.h>
#include <opencv\cxcore.h>
#include <stdlib.h>
#include <stdio.h>
void main(int argc, char* argv[])
{
IplImage *src=cvLoadImage("C:\\Users\\zxl\\Desktop\\test.jpg",1);
IplImage *process=cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,1);
IplImage *binaryimage=cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,1);
cvNamedWindow("src",1);
cvShowImage("src",src);
cvCvtColor(src,process,CV_BGRA2GRAY);//转化为灰度图
CvMemStorage* storage = NULL;
CvSeq* lines = NULL;
storage = cvCreateMemStorage(0);
cvThreshold(process,process,220,255,CV_THRESH_BINARY_INV);
cvCopy( process,binaryimage);//转化为二值图并且备份到binaryimage
cvNamedWindow("binaryimage",1);
cvShowImage("binaryimage",binaryimage);
//Hough直线检测,采用标准霍夫变换
lines = cvHoughLines2( process, storage, CV_HOUGH_STANDARD, 1, CV_PI/180, 190, 0, 0 );
cvSet(src,cvScalar(255,255,255));//将原图清空,绘制出检测到的直线
int i,j;
float rho, theta;
for( i = 0; i < lines->total; i++ )
{
float* line = (float*)cvGetSeqElem(lines, i);
rho = line[0];
theta = line[1];
CvPoint pt1, pt2;
double a = cos(theta), b = sin(theta);
if( fabs(b) < 0.001 )
{
pt1.x = pt2.x = cvRound(rho);
pt1.y = 0;
pt2.y = src->height;
}
else if( fabs(a) < 0.001 )
{
pt1.y = pt2.y = cvRound(rho);
pt1.x = 0;
pt2.x = src->width;
}
else
{
pt1.x = 0;
pt1.y = cvRound(rho/b);
pt2.x = cvRound(rho/a);
pt2.y = 0;
}
int bb = rand() & 255, gg = rand() & 255, rr = rand() & 255;
cvLine( src, pt1, pt2, CV_RGB(rr,gg,bb), 1, 8 );
}
//按照theta排序
for (i = 0; i < lines->total; i++)
{
for (j = i; j < lines->total; j++)
{
float* line1 = (float*)cvGetSeqElem(lines, i);
float* line2 = (float*)cvGetSeqElem(lines, j);
if (line1[1]>line2[1])
{
rho=line2[0];
theta=line2[1];
line2[0]=line1[0];
line2[1]=line1[1];
line1[0]=rho;
line1[1]=theta;
}
}
}
//统计水平线与竖直线的条数
int HNo=0,VNo=0;
for (i = 0; i < lines->total; i++)
{
float* line = (float*)cvGetSeqElem(lines, i);
if (line[1]==0)
{
VNo++;
}
}
HNo=lines->total-VNo;
printf("直线的条数共计%d,水平线%d条,竖直线%d条\n",lines->total,HNo,VNo);
//按照rho排序,先排竖直线
for (i = 0; i < VNo; i++)
{
for (j = i; j < VNo; j++)
{
float* line1 = (float*)cvGetSeqElem(lines, i);
float* line2 = (float*)cvGetSeqElem(lines, j);
if (line1[0]>line2[0])
{
rho=line2[0];
theta=line2[1];
line2[0]=line1[0];
line2[1]=line1[1];
line1[0]=rho;
line1[1]=theta;
}
}
}
//后排水平线
for (i = VNo; i < lines->total; i++)
{
for (j = i; j < lines->total; j++)
{
float* line1 = (float*)cvGetSeqElem(lines, i);
float* line2 = (float*)cvGetSeqElem(lines, j);
if (line1[0]>line2[0])
{
rho=line2[0];
theta=line2[1];
line2[0]=line1[0];
line2[1]=line1[1];
line1[0]=rho;
line1[1]=theta;
}
}
}
//输出排序后的结果
for( i = 0; i < lines->total; i++ )
{
float* line = (float*)cvGetSeqElem(lines, i);
printf("直线%d:rho=%f,theta=%f\n",i,line[0],line[1]);
}
//逐个扫描各个矩形区域
for (i=0;i<17;i++)
{
for (j=0;j<5;j++)
{
int x1,y1,x2,y2,reduce;
reduce=2;
float* line = (float*)cvGetSeqElem(lines,2+j);
x1=(int)line[0]+reduce;
if (j==4)
{
x2=src->width-reduce;
}
else
{
line = (float*)cvGetSeqElem(lines,3+j);
x2=(int)line[0]-reduce;
}
line = (float*)cvGetSeqElem(lines,VNo+1+i);
y1=(int)line[0]+reduce;
if (i==16)
{
y2=src->height-reduce;
}
else
{
line = (float*)cvGetSeqElem(lines,VNo+2+i);
y2=(int)line[0]-reduce;
}
int sum=0;
for (int m=x1;m<=x2;m++)
{
for (int n=y1;n<=y2;n++)
{
if (CV_IMAGE_ELEM(binaryimage,unsigned char,n,m)==255)
{
sum++;
}
}
}
//面积值大于50则认为存在对号
if (sum>50)
{
cvSetImageROI(src,cvRect(x1,y1,x2-x1,y2-y1));
int bb = rand() & 0xffffff;
cvFillImage(src,bb);
cvResetImageROI(src);
break;
}
}
printf("部门%d的等次:",i+1);
switch(j)
{
case 0:
printf("好\n");
break;
case 1:
printf("较好\n");
break;
case 2:
printf("一般\n");
break;
case 3:
printf("差\n");
break;
case 4:
printf("极差\n");
break;
default:
printf("error\n");
break;
}
}
cvNamedWindow( "result", 1 );
cvShowImage( "result", src);
cvSaveImage("result.jpg",src);
cvWaitKey(0);
cvDestroyAllWindows();
cvReleaseImage(&src);
cvReleaseImage(&process);
cvReleaseImage(&binaryimage);
}