对抗神经网络(二)——DCGAN
一、DCGAN介绍
DCGAN即使用卷积网络的对抗网络,其原理和GAN一样,只是把CNN卷积技术用于GAN模式的网络里,G(生成器)网在生成数据时,使用反卷积的重构技术来重构原始图片。D(判别器)网用卷积技术来识别图片特征,进而做出判别。同时,CDGAN中的卷积神经网络也做了一些结构的改变,以提高样本的质量和收敛速度。
DCGAN的generator网络结构图如下:
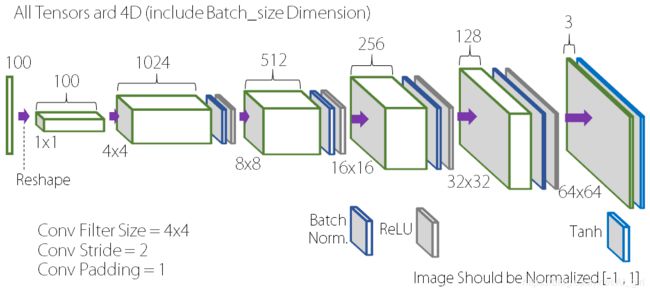
- G网中使用ReLU作为激活函数,最后一层使用Tanh作为激活函数。
- 去掉了FC层,使网络变为全卷积网络。
DCGAN的discriminator网络结构图如下:
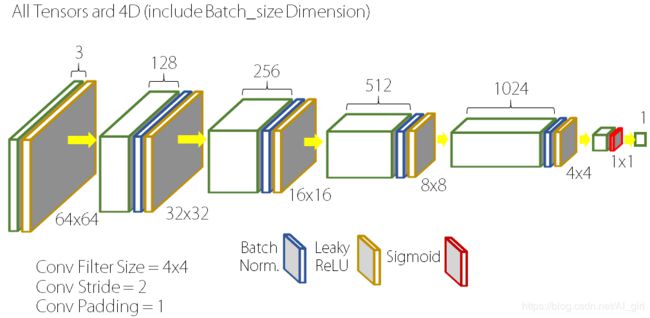
- D中取消所有的池化层,使用转置卷积(transposed convolutional layer)并且步长大于等于2进行上采样。
- D网中也加入stride的卷积代替pooling。
- 在D网和G网中均使用批量归一化(batch normalization),而在最后一层时通常不会使用batch normalization,这是为了保证模型能够学习到数据的正确均值和方差。
- D网络中使用LeakyReLU作为激活函数。
- DCGAN中换成了两个卷积神经网络(CNN)的G和D,可以刚好的学习对输入图像层次化的表示,尤其在生成器部分会有更好的模拟效果。DCGAN在训练过程中会使用Adam优化算法。
三、网络实现
以人脸数据为例
1、环境配置(Environments)
- window10
- python3.6.4
- TensorFlow1.13.1
2、数据准备
数据集:face-swap
数据可以从网上自行下载,或者利用自己的数据,这里对数据的没有严格要求。我是采用了网络上的数据集,这里给出数据的下载地址:https://anonfile.com/p7w3m0d5be/face-swap.zip将解压的数据分别放入文件夹A和文件夹B
3、超参数设置(Hyper-Parameters)
- Image Size = 64x64
- Batch Size = 64
- Learning Rate = 0.00005
- Adam_beta1 = 0.5
- z_dim = 100
- Epoch = 500
# 导入需要的包
from PIL import Image # Image 用于读取影像
#from skimage import io # io也可用于读取影响,效果比Image读取的更好一些
import tensorflow as tf # 用于构建神经网络模型
import matplotlib.pyplot as plt # 用于绘制生成影像的结果
import numpy as np # 读取影像
import os # 文件夹操作
import time # 计时
# 设置相关参数
is_training = True
input_dir = "./face/" # 原始数据的文件夹路径
# 设置超参数 hyper parameters
batch_size = 64
image_width = 64
image_height = 64
image_channel = 3
data_shape = [64, 64, 3]
data_length = 64 * 64 * 3
z_dim = 100
learning_rate = 0.00005
beta1 = 0.5
epoch = 500
4、读取数据并将原始数据数据resize成64*64*3的格式,原始图像大小为256*256*3
# 读取数据的函数
def prepare_data(input_dir, floder):
'''
函数功能:通过输入图像的路径,读取训练数据
:参数 input_dir: 图像数据所在的根目录,即"./face"
:参数 floder: 图像数据所在的子目录, 即"./face/A"
:return: 返回读取好的训练数据
'''
# 遍历图像路径,并获取图像数量
images = os.listdir(input_dir + floder)
image_len = len(images)
# 设置一个空data,用于存放数据
data = np.empty((image_len, image_width, image_height, image_channel), dtype="float32")
# 逐个图像读取
for i in range(image_len):
# 如果导入的是skimage.io,则读取影像应该写为img = io.imread(input_dir + images[i])
img = Image.open(input_dir + floder + "/" + images[i]) # 打开图像
img = img.resize((image_width, image_height)) # 将256*256变成64*64
arr = np.asarray(img, dtype="float32") # 将格式改为np.array
data[i, :, :, :] = arr # 将其放入data中
sess = tf.Session()
sess.run(tf.initialize_all_variables())
data = tf.reshape(data, [-1, image_width, image_height, image_channel])
train_data = data * 1.0 / 127.5 - 1.0 # 对data进行正则化
train_data = tf.reshape(train_data, [-1, data_length]) # 将其拉伸成一维向量
train_set = sess.run(train_data)
sess.close()
return train_set
5、定义生成器函数
# 定义生成器
def Generator(z, is_training, reuse):
'''
函数功能:输入噪声z,生成图像gen_img
:param z:即输入数据,一般为噪声
:param is_training:是否为训练环节
:return: 返回生成影像gen_img
'''
# 图像的channel维度变化为100->1024->512->256->128->3
depths = [1024, 512, 256, 128] + [data_shape[2]]
with tf.variable_scope("Generator", reuse=reuse):
# 第一层100
with tf.variable_scope("g_c1", reuse=reuse):
output = tf.layers.dense(z, depths[0] * 4 * 4, trainable=is_training)
output = tf.reshape(output, [batch_size, 4, 4, depths[0]])
output = tf.nn.relu(tf.layers.batch_normalization(output, training=is_training))
# 第二层反卷积层1024
with tf.variable_scope("g_dc1", reuse=reuse):
output = tf.layers.conv2d_transpose(output, depths[1], [5, 5], strides=(2, 2),
padding="SAME", trainable=is_training)
output = tf.nn.relu(tf.layers.batch_normalization(output, training=is_training))
# 第三层反卷积层512
with tf.variable_scope("g_dc2", reuse=reuse):
output = tf.layers.conv2d_transpose(output, depths[2], [5, 5], strides=(2, 2),
padding="SAME", trainable=is_training)
output = tf.nn.relu(tf.layers.batch_normalization(output, training=is_training))
# 第四层反卷积层256
with tf.variable_scope("g_dc3", reuse=reuse):
output = tf.layers.conv2d_transpose(output, depths[3], [5, 5], strides=(2, 2),
padding="SAME", trainable=is_training)
output = tf.nn.relu(tf.layers.batch_normalization(output, training=is_training))
# 第五层反卷积层128
with tf.variable_scope("g_dc4", reuse=reuse):
output = tf.layers.conv2d_transpose(output, depths[4], [5, 5], strides=(2, 2),
padding="SAME", trainable=is_training)
gen_img = tf.nn.tanh(output)
return gen_img
6、定义判别器函数
# 定义判别器
def Discriminator(x, is_training, reuse):
'''
函数功能:判别输入的图像是真或假
:param x: 输入数据
:param is_training: 是否为训练环节
:return: 判别结果
'''
# 判别器的channel维度变化为:3->64->128->256->512
depths = [data_shape[2]] + [64, 128, 256, 512]
with tf.variable_scope("Discriminator", reuse=reuse):
# 第一层卷积层,注意用的是leaky_relu函数
with tf.variable_scope("d_cv1", reuse=reuse):
output = tf.layers.conv2d(x, depths[1], [5, 5], strides=(2, 2),
padding="SAME", trainable=is_training)
output = tf.nn.leaky_relu(tf.layers.batch_normalization(output, training=is_training))
# 第二层卷积层,注意用的是leaky_relu函数
with tf.variable_scope("d_cv2", reuse=reuse):
output = tf.layers.conv2d(output, depths[2], [5, 5], strides=(2, 2),
padding="SAME", trainable=is_training)
output = tf.nn.leaky_relu(tf.layers.batch_normalization(output, training=is_training))
# 第三层卷积层,注意用的是leaky_relu函数
with tf.variable_scope("d_cv3", reuse=reuse):
output = tf.layers.conv2d(output, depths[3], [5, 5], strides=(2, 2),
padding="SAME", trainable=is_training)
output = tf.nn.leaky_relu(tf.layers.batch_normalization(output, training=is_training))
# 第四层卷积层,注意用的是leaky_relu函数
with tf.variable_scope("d_cv4", reuse=reuse):
output = tf.layers.conv2d(output, depths[4], [5, 5], strides=(2, 2),
padding="SAME", trainable=is_training)
output = tf.nn.leaky_relu(tf.layers.batch_normalization(output, training=is_training))
# 第五层全链接层
with tf.variable_scope("d_c1", reuse=reuse):
output = tf.layers.flatten(output)
disc_img = tf.layers.dense(output, 1, trainable=is_training)
return disc_img
7、编写保存结果
def plot_and_save(order, images):
'''
函数功能:绘制生成器的结果,并保存
:param order:
:param images:
:return:
'''
# 将一个batch_size的所有图像进行保存
batch_size = len(images)
n = np.int(np.sqrt(batch_size))
# 读取图像大小,并生成掩模canvas
image_size = np.shape(images)[2]
n_channel = np.shape(images)[3]
images = np.reshape(images, [-1, image_size, image_size, n_channel])
canvas = np.empty((n * image_size, n * image_size, image_channel))
# 为每个掩模赋值
for i in range(n):
for j in range(n):
canvas[i * image_size:(i + 1) * image_size, j * image_size:(j + 1) * image_size, :] = images[
n * i + j].reshape(64, 64, 3)
# 绘制结果,并设置坐标轴
plt.figure(figsize=(8, 8))
plt.imshow(canvas, cmap="gray")
label = "Epoch: {0}".format(order + 1)
plt.xlabel(label)
# 为每个文件命名
if type(order) is str:
file_name = order
else:
file_name = "face_gen" + str(order)
# 保存绘制的结果
plt.savefig(file_name)
print(os.getcwd())
print("Image saved in file: ", file_name)
plt.close()
8、定义训练过程
# 定义训练过程
def training():
'''
函数功能:实现DCGAN的训练过程
'''
# 准备数据。这里输入根目录,以A的影像为例进行图像生成
data = prepare_data(input_dir, "A")
# 构建网络结构,这是程序的核心部分---------------------------------------------
x = tf.placeholder(tf.float32, shape=[None, data_length], name="Input_data")
x_img = tf.reshape(x, [-1] + data_shape)
z = tf.placeholder(tf.float32, shape=[None, z_dim], name="latent_var")
G = Generator(z, is_training=True, reuse=False)
D_fake_logits = Discriminator(G, is_training=True, reuse=False)
D_true_logits = Discriminator(x_img, is_training=True, reuse=True)
# 定义生成器的损失函数G_loss
G_loss = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(
logits=D_fake_logits, labels=tf.ones_like(D_fake_logits)))
# 定义判别器的损失函数D_loss
D_loss_1 = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(
logits=D_true_logits, labels=tf.ones_like(D_true_logits)))
D_loss_2 = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(
logits=D_fake_logits, labels=tf.zeros_like(D_fake_logits)))
D_loss = D_loss_1 + D_loss_2
# 定义方差
total_vars = tf.trainable_variables()
d_vars = [var for var in total_vars if "d_" in var.name]
g_vars = [var for var in total_vars if "g_" in var.name]
# 定义优化方式
with tf.control_dependencies(tf.get_collection(tf.GraphKeys.UPDATE_OPS)):
g_optimization = tf.train.AdamOptimizer(learning_rate=learning_rate,
beta1=beta1).minimize(G_loss, var_list=g_vars)
d_optimization = tf.train.AdamOptimizer(learning_rate=learning_rate,
beta1=beta1).minimize(D_loss, var_list=d_vars)
print("we successfully make the network")
# 网络模型构建结束------------------------------------------------------------
# 训练模型初始化
start_time = time.time() # 计时
sess = tf.Session()
sess.run(tf.initialize_all_variables())
# 逐个epoch训练
for i in range(epoch):
total_batch = int(len(data) / batch_size)
d_value = 0
g_value = 0
# 逐个batch训练
for j in range(total_batch):
batch_xs = data[j * batch_size:j * batch_size + batch_size]
# 训练判别器
z_sampled1 = np.random.uniform(low=-1.0, high=1.0, size=[batch_size, z_dim])
Op_d, d_ = sess.run([d_optimization, D_loss], feed_dict={x: batch_xs, z: z_sampled1})
# 训练生成器
z_sampled2 = np.random.uniform(low=-1.0, high=1.0, size=[batch_size, z_dim])
Op_g, g_ = sess.run([g_optimization, G_loss], feed_dict={x: batch_xs, z: z_sampled2})
# 尝试生成影像并保存
images_generated = sess.run(G, feed_dict={z: z_sampled2})
d_value += d_ / total_batch
g_value += g_ / total_batch
plot_and_save(i, images_generated)
# 输出时间和损失函数loss
hour = int((time.time() - start_time) / 3600)
min = int(((time.time() - start_time) - 3600 * hour) / 60)
sec = int((time.time() - start_time) - 3600 * hour - 60 * min)
print("Time: ", hour, "h", min, "min", sec, "sec", " Epoch: ",
i, "G_loss: ", g_value, "D_loss: ", d_value)
9、进行训练
if __name__ == "__main__":
training()
四、结果
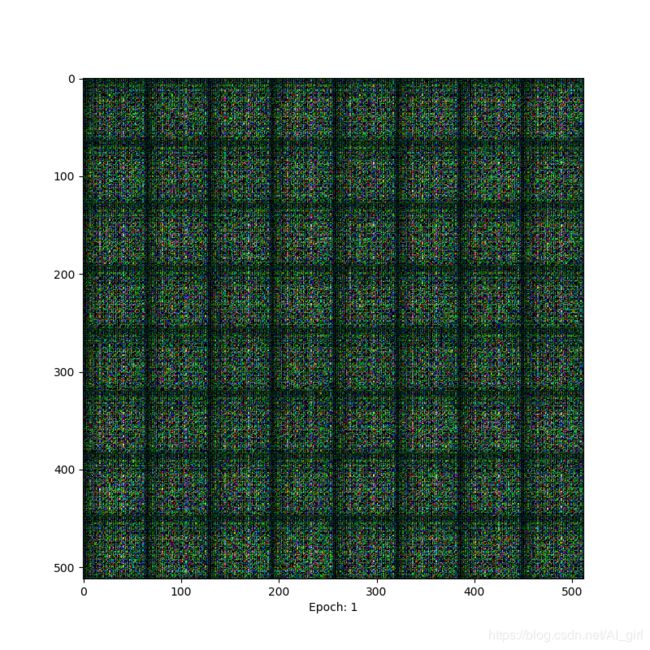
Epoch=1,基本什么也看不清
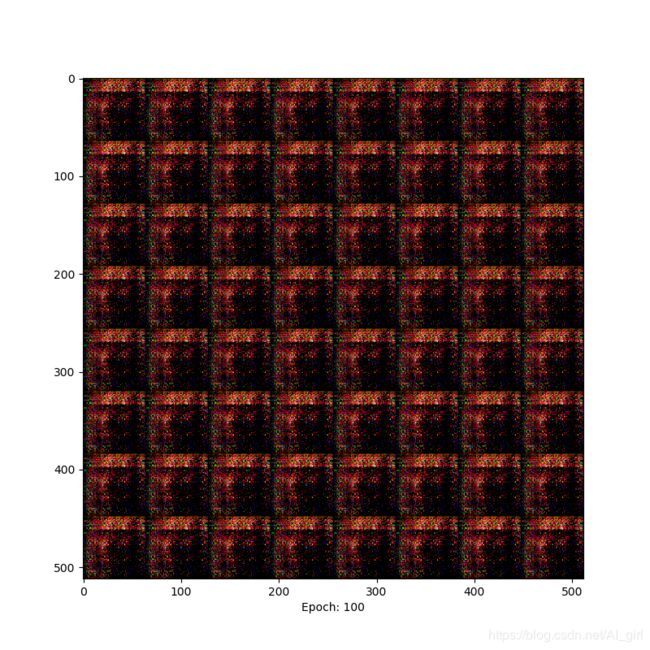
Epoch=100时,有了明显的纹理变化
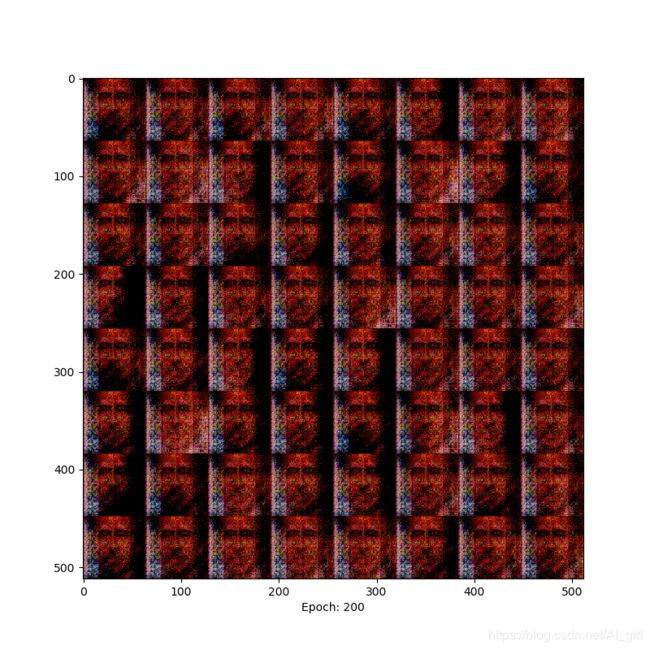
Epoch=200时,能够明显的看到人脸轮廓
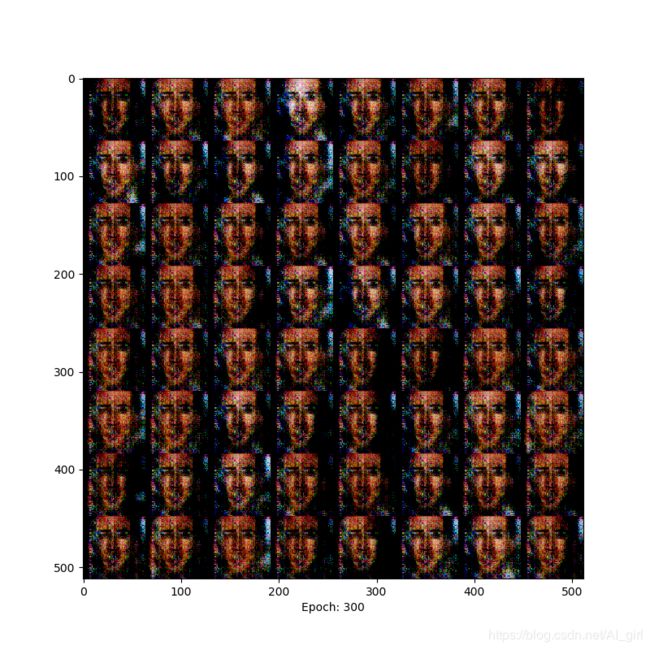
Epoch= 300时,面部特征比较清晰
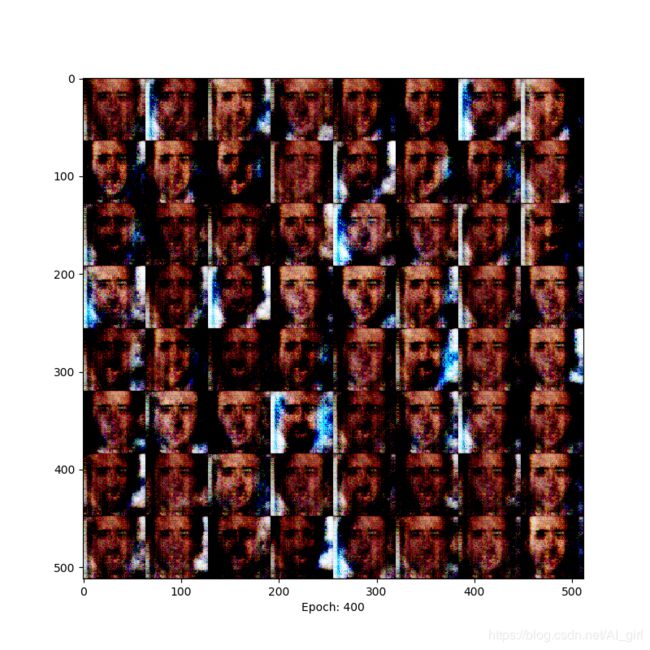
Epoch= 400时,人脸与背景区分明显
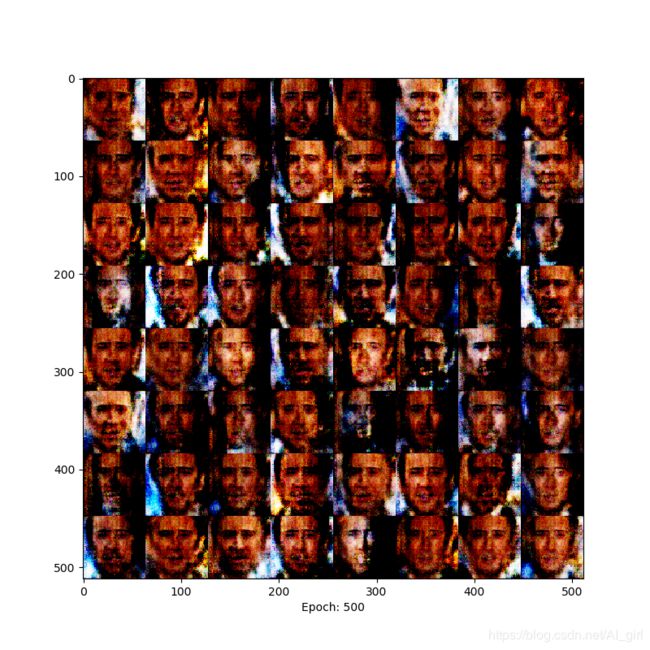
epoch= 500时,人脸色彩对比更加明显 ,已经能够清晰地辨别人脸。
在训练的过程中出现了模型爆炸现象,这个问题在后期的WGAN中会得到解决。下面是从原文中截取的模型爆炸原因,原文地址请参考:https://arxiv.org/pdf/1511.06434.pdf

参考链接:
https://blog.csdn.net/z704630835/article/details/82254193
https://github.com/HyeongminLEE/Tensorflow_DCGAN