斯坦福CS231n作业代码(汉化)Assignment 2 Q4
编写:土豆 MoreZheng SlyneD
校对:碧海听滔 Molly
总校对与审核:寒小阳
本系列由斯坦福大学CS231n课后作业提供
CS231N - Assignment2 - Q4 - ConvNet on CIFAR-10
问题描述:使用IPython Notebook(现版本为jupyter notebook,如果安装anaconda完整版会内置),在ConvolutionalNetworks.ipynb文件中,你将实现几个卷积神经网络中常用的新层。使用CIFAR-10数据,训练出一个深度较浅的卷积神经网络,最后尽你所能训练出一个最佳的神经网络。
任务
实现卷积神经网络卷积层的前向计算与反向传导
实现卷积神经网络池化层的前向计算与反向传导
卷积层与池化层的加速
卷积神经网络结构
常规神经网络的输入是一个向量,经一系列隐层的转换后,全连接输出。在分类问题中,它输出的值被看做是不同类别的评分值。
神经网络的输入可不可以是图片呢?
常规神经网络对于大尺寸图像效果不尽人意。图片的像素点过多,处理起来极为复杂。因此在处理图片的过程中较为合理地降维成为了一个研究方向。于是,在基本神经网络的结构上,衍生出了一种新的神经网络结构,我们称之为卷积神经网络。
下图是一个传统多层卷积神经网络结构:
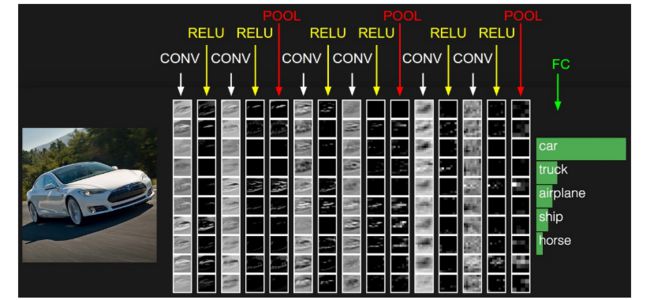
可以看出,上图网络结构开始为“卷积层(CONV),relu层(RELU),池化层(POOL)”C-R-P周期循环,最后由全连接层(FC)输出结果。

注:实际应用的过程中常常不限于C-R-P循环,也有可能是C-C-R-P等等
设激活函数为 fsigmoid(−) f s i g m o i d ( − ) ,池化操作为 pool(−) p o o l ( − ) ,x代表输入的图像像素矩阵,w代表过滤层(卷积核),b代表偏置。C-R-P周期则有下面的计算公式:
卷积神经网络的理解比较困难,为了更好地理解,我们先讲解过程再讨论实际应用。
卷积层的朴素(无加速算法)实现与理解
(在实际应用过程中,一般使用加速处理的卷积层,这里表现的是原始版本)
卷积层元素
下图是卷积层的元素:输入图片与过滤参数。

输入图片(image):输入层(Input Layer)有3个深度(D1,D2,D3,通常代表图片的三个通道RGB)。我可以将每个深度独立出来,看成三幅图片。图片的大小为32*32。
过滤参数(filter):过滤器有很多称呼,如“卷积核”、“过滤层”或者“特征检测器”。不要被名词坑了。过滤器也有3个深度(D1,D2,D3),就是与输入图片的深度进行一一对应,方便乘积操作。过滤器窗口一般比输入图片窗口小。
卷积层的前向计算
下图是卷积层的具体实现方法。

x代表图片image矩阵,w代表过滤层矩阵。各个过滤器分别与image的一部分进行点积,用点积结果排列成结果,这就是卷积过程。下面的动图就是卷积过程。

上图中我们看到每次窗口移动2格。这2格就是每次卷积的移动步长。
我们看到原来的图片在周围填充了一圈0。填充0的宽度即为每次卷积的填充宽度padding(上图的填充宽度就是1)
移动步长很好理解,但为什么要填充呢?假设我们不填充。如下图:

会发现每次卷积之后都会有维度降低。浅层卷积网络可能没有什么问题。但是深层卷积可能在网络没到最后的时候维度即降为0。
这显然不是我们所希望的。
当然,如果有意愿用卷积计算去降维也可以,不过我们更喜欢用池化层的池化操作降维。为甚?因为卷基层和池化层各有分工!我们先来了解卷积层的作用。
卷积层正向卷积过程代码实现
def conv_forward_naive(x, w, b, conv_param):
""" A naive implementation of the forward pass for a convolutional layer. The input consists of N data points, each with C channels, height H and width W. We convolve each input with F different filters, where each filter spans all C channels and has height HH and width HH. Input: - x: Input data of shape (N, C, H, W) - w: Filter weights of shape (F, C, HH, WW) - b: Biases, of shape (F,) - conv_param: A dictionary with the following keys: - 'stride': The number of pixels between adjacent receptive fields in the horizontal and vertical directions. - 'pad': The number of pixels that will be used to zero-pad the input. Returns a tuple of: - out: Output data, of shape (N, F, H', W') where H' and W' are given by H' = 1 + (H + 2 * pad - HH) / stride W' = 1 + (W + 2 * pad - WW) / stride - cache: (x, w, b, conv_param) """
##########################################################################################
# TODO: Implement the convolutional forward pass. 任务:完成带卷积操作的前向传播 #
# Hint: you can use the function np.pad for padding. 提示:可以使用np.pad函数实现padding操作 #
##########################################################################################
N, C, H, W = x.shape # N个样本,C个通道,H的高度,W的宽度
F, C, HH, WW = w.shape # F个过滤器,C个通道,HH的过滤器高度,WW的过滤器宽度
stride = conv_param['stride'] # 过滤器每次移动的步长
pad = conv_param['pad'] # 图片填充的宽度
## 计算卷积结果矩阵的大小并分配全零值占位
new_H = 1 + int((H + 2 * pad - HH) / stride)
new_W = 1 + int((W + 2 * pad - WW) / stride)
out = np.zeros([N, F, new_H, new_W])
## 卷积开始
for n in range(N):
for f in range(F):
## 临时分配(new_H, new_W)大小的全偏移项卷积矩阵,(即提前加上偏移项b[f])
conv_newH_newW = np.ones([new_H, new_W])*b[f]
for c in range(C):
## 填充原始矩阵,填充大小为pad,填充值为0
pedded_x = np.lib.pad(x[n, c], pad_width=pad, mode='constant', constant_values=0)
for i in range(new_H):
for j in range(new_W):
conv_newH_newW[i, j] += np.sum(pedded_x[i * stride: i * stride+HH, j * stride: j * stride + WW] * w[f, c, :, :] )
out[n,f] = conv_newH_newW
###########################################################################
# END OF YOUR CODE #
###########################################################################
cache = (x, w, b, conv_param)
return out, cache卷积层的个人理解
对卷积层的作用,很多人的说法莫衷一是。我这里谈谈自己的理解(未必精准)。
1. 实现某像素点多通道以及周围信息的整合
说白了就是将一个像素与其周围的点建立联系。我们用将一点及其周边“卷”起来求和计算。那么每一层卷积必然是将一个像素点与周围建立联系的过程。
这么说起来“Convolution”翻译为“卷和”更恰当,其实卷积的“积”就是积分的意思2. 我们先讲一个丧心病狂的故事
如果你每天总偷看别的美女不注意女朋友,那么女朋友每天都要扇你一巴掌。打你一巴掌后,脸的一部分就肿了。你的脸就是图片,女朋友的巴掌就是卷积核层。每打一巴掌,相当于“卷积核”作用脸部一个地方“做卷积”。脸肿了相当于脸部“卷积后”输出的结果。
如果有一天,女友忍无可忍,连续扇你嘴巴,那么问题就出现了:上一次扇你鼓起来的包还没消肿,第二个巴掌就来了,这就是多层“卷积”。
女友再狠一点,频率越来越高,以至于你都辨别不清时间间隔了。那么,求和就变成积分了。使用“积分运算的卷积”就是我们在大学数学《概率论与数理统计》中学到的“卷积运算”。女友打你在不同的位置,自然会有不同的身体反应。根据打你后卷积后身体的反应卷积结果可以判断出打到什么位置了。
| 身体反应(卷积结果) | 可能推论 |
|---|---|
| 肿了 | 打到脸了 |
| 红了 | 打到肚子了 |
| 没反应 | 打到骨头了 |
| 女友手疼 | 打到骨刺了 |
| 更爱她了 | 变态 |
| 没有感觉 | 单身狗的幻想 |
这么一解释卷积层的解释果然很明显。。。。嗯,对。。。。我自己都信了。。。。3. 图像处理中模板的概念
图片卷积不是一个新概念,在传统图像处理中就有与“卷积运算”相同的“模板运算”。模板即一个矩阵方块,在这里你可以认为是卷积核,模板运算方法与卷积运算方法相同。如下面的一个模板
图片用这个模板进行运算后,可以得到类似于如下的效果。

上面的那种模板就是“低通滤波模板”的一种。
通过改变方阵的数值与大小,可以生成很多新的模板。如“高通滤波模板”,“边缘检测模板”,“匹配滤波边缘检测模板”等等。。不同的模板运用在不同的场景中。
那么又问题来了:我们该在什么时候,用什么数值的模板?
答案比价复杂。传统的模板选择,凭借的是算法工程师们的经验。但现在,我们不怕了!~~神经网络帮我们训练模板的参数。在多层神经网络中,图片可以添加很多个模板(即卷积层),一个或多个模板(卷积层)负责一项工作。图片在卷积神经网络的一次前向过程,就相当于对图像做一次特定的处理。
卷积层反向求导
前面我们介绍了卷积层的前向计算。大致了解了卷积的作用,但是神经网络的参数是怎么来的呢?参数的获取是一个迭代的训练的过程,每次反向传播都纠正参数,减小误差。(具体细节请看Q1~Q3中关于神经网络“前向计算,反向传播”的讲解。)
上文提到了C-R-P周期计算公式。
frelu(−) f r e l u ( − ) 为relu激活函数,池化操作用 pool(−) p o o l ( − ) 表示,像像素矩阵,w代表过滤层(卷积核),b代表偏置。编写卷积层反向传播时,暂时不用考虑池化层,与激活函数。我们可以用g()代指卷积层后所有的操作。所以这一层的反向对x求导可以简化为如下操作。
在斯坦福CS231n课程作业中,把无实际用处的 g g 忽略。记 ∂x=∂g∂x,∂out=∂g∂out ∂ x = ∂ g ∂ x , ∂ o u t = ∂ g ∂ o u t 。
对于中国学生来说这是一个深渊巨坑的记法。在高等数学教材里。 ∂dout ∂ d o u t , ∂dx ∂ d x 有专门的含义。但这里我们要遵循老师的记法。
下图为卷积层反向求导的过程图片。

卷积层反向求导过程代码实现
def conv_backward_naive(dout, cache):
""" A naive implementation of the backward pass for a convolutional layer. Inputs: - dout: Upstream derivatives. - cache: A tuple of (x, w, b, conv_param) as in conv_forward_naive Returns a tuple of: - dx: Gradient with respect to x - dw: Gradient with respect to w - db: Gradient with respect to b """
###########################################################################
# TODO: Implement the convolutional backward pass. 任务: 卷积层的反向传播 #
###########################################################################
# 数据准备
x, w, b, conv_param = cache
pad = conv_param['pad']
stride = conv_param['stride']
F, C, HH, WW = w.shape
N, C, H, W = x.shape
N, F, new_H, new_W = dout.shape
# 下面,我们模拟卷积,首先填充x。
padded_x = np.lib.pad(x,
((0, 0), (0, 0), (pad, pad), (pad, pad)),
mode='constant',
constant_values=0)
padded_dx = np.zeros_like(padded_x) # 填充了的dx,后面去填充即可得到dx
dw = np.zeros_like(w)
db = np.zeros_like(b)
for n in range(N): # 第n个图像
for f in range(F): # 第f个过滤器
for i in range(new_H):
for j in range(new_W):
db[f] += dout[n, f, i, j] # dg对db求导为1*dout
dw[f] += padded_x[n, :, i*stride : HH + i*stride, j*stride : WW + j*stride] * dout[n, f, i, j]
padded_dx[n, :, i*stride : HH + i*stride, j*stride : WW + j*stride] += w[f] * dout[n, f, i, j]
# 去掉填充部分
dx = padded_dx[:, :, pad:pad + H, pad:pad + W]
###########################################################################
# END OF YOUR CODE #
###########################################################################
return dx, dw, db池化层的朴素(无加速算法)实现与理解
池化层的前向计算
在“卷积层需要填充”这一部分我们就说过:卷积层负责像素间建立联系,池化层负责降维。从某种层度上来说,池化操作也算是一种不需要填充操作的特殊的卷积操作。
池化操作也需要过滤器(也有翻译为池化核),每次过滤层移动的距离叫做步长。
不过在池化操作中,过滤器与原图可以不做卷积运算,仅仅是降维功能。下图就表示过滤器选择窗口最大项的最大池化操作。

最大池化操作的前向计算
基于卷积的经验,很快地写出最大池化操作的前向计算与反向求导的代码。
def max_pool_forward_naive(x, pool_param):
""" A naive implementation of the forward pass for a max pooling layer. Inputs: - x: Input data, of shape (N, C, H, W) - pool_param: dictionary with the following keys: - 'pool_height': The height of each pooling region - 'pool_width': The width of each pooling region - 'stride': The distance between adjacent pooling regions Returns a tuple of: - out: Output data - cache: (x, pool_param) """
###########################################################################
# TODO: Implement the max pooling forward pass 任务:实现正向最大池化操作 #
###########################################################################
# 准备数据
N, C, H, W = x.shape
pool_height = pool_param['pool_height'] # 池化过滤器高度
pool_width = pool_param['pool_width'] # 池化过滤器宽度
pool_stride = pool_param['stride'] # 移动步长
new_H = 1 + int((H - pool_height) / pool_stride) # 池化结果矩阵高度
new_W = 1 + int((W - pool_width) / pool_stride) # 池化结果矩阵宽度
out = np.zeros([N, C, new_H, new_W])
for n in range(N):
for c in range(C):
for i in range(new_H):
for j in range(new_W):
out[n,c,i,j] = np.max(x[n, c, i*pool_stride : i*pool_stride+pool_height, j*pool_stride : j*pool_stride+pool_width])
###########################################################################
# END OF YOUR CODE #
###########################################################################
cache = (x, pool_param)
return out, cache最大池化的反向求导
def max_pool_backward_naive(dout, cache):
""" A naive implementation of the backward pass for a max pooling layer. Inputs: - dout: Upstream derivatives - cache: A tuple of (x, pool_param) as in the forward pass. Returns: - dx: Gradient with respect to x """
###########################################################################
# TODO: Implement the max pooling backward pass 任务:反向最大池化操作 #
###########################################################################
# 数据准备
x, pool_param = cache
N, C, H, W = x.shape
pool_height = pool_param['pool_height']
pool_width = pool_param['pool_width']
pool_stride = pool_param['stride']
new_H = 1 + int((H - pool_height) / pool_stride)
new_W = 1 + int((W - pool_width) / pool_stride)
dx = np.zeros_like(x)
for n in range(N):
for c in range(C):
for i in range(new_H):
for j in range(new_W):
window = x[n, c, i * pool_stride: i * pool_stride + pool_height,j * pool_stride: j * pool_stride + pool_width]
dx[n, c, i * pool_stride: i * pool_stride + pool_height, j * pool_stride: j * pool_stride + pool_width] = (window == np.max(window))*dout[n,c,i,j]
###########################################################################
# END OF YOUR CODE #
###########################################################################
return dx三明治卷积层(Convolutional “sandwich” layers)
“三明治”卷积层是斯坦福大学CS231n的专门讲法,其实就是将多个操作组合成一个常用模式。前文我们一直说的C-R-P组合,可以看做一种三明治卷积层。卷积神经网络在实际应用上,也往往跳过底层实现,直接面向组合操作。
在文件cs231n/layer_utils.py 里或keras的源码里。都会找到这样的“三明治”卷积层。它们的简化了复杂深度学习神经网络的实现。
空间批量正则化(空间批量归一化Spatial Batch Normalization,SBN)
对于深度网络的训练是一个复杂的过程,只要网络的前面几层发生微小的改变,那么后面几层就会被累积放大下去。一旦网络某一层的输入数据的分布发生改变,那么这一层网络就需要去适应学习这个新的数据分布。所以,在训练过程中,如果训练数据的分布一直发生变化,那么网络的训练速度将会受到影响。基于“批量正则化(BN)层”的理念,我们引入了“空间批量正则化SBN层”。
BN(Batch Normalization,批量正则化)的提出说到底还是为了防止训练过程中的“梯度弥散”。在BN中,通过将activation规范为均值和方差一致的手段使得原本会减小的activation变大,避免趋近于0的数的出现。但是CNN的BN层有些不同,我们需要稍加改动,变成更适合训练的“SBN”。
def spatial_batchnorm_forward(x, gamma, beta, bn_param):
""" Computes the forward pass for spatial batch normalization. Inputs: - x: Input data of shape (N, C, H, W) - gamma: Scale parameter, of shape (C,) - beta: Shift parameter, of shape (C,) - bn_param: Dictionary with the following keys: - mode: 'train' or 'test'; required - eps: Constant for numeric stability - momentum: Constant for running mean / variance. momentum=0 means that old information is discarded completely at every time step, while momentum=1 means that new information is never incorporated. The default of momentum=0.9 should work well in most situations. - running_mean: Array of shape (D,) giving running mean of features - running_var Array of shape (D,) giving running variance of features Returns a tuple of: - out: Output data, of shape (N, C, H, W) - cache: Values needed for the backward pass """
out, cache = None, None
###########################################################################
# TODO: Implement the forward pass for spatial batch normalization. #
# 任务:实现正向的SBN层 #
# HINT: You can implement spatial batch normalization using the vanilla #
# version of batch normalization defined above. Your implementation should#
# be very short; ours is less than five lines. #
# 提示: 可以按照上文中的提示实现一个原始的批量归一化过程。全部代码应小于5行 #
###########################################################################
N, C, H, W = x.shape
x_new = x.transpose(0, 2, 3, 1).reshape(N*H*W, C)
out, cache = batchnorm_forward(x_new, gamma, beta, bn_param)
out = out.reshape(N, H, W, C).transpose(0, 3, 1, 2)
###########################################################################
# END OF YOUR CODE #
###########################################################################
return out, cache
def spatial_batchnorm_backward(dout, cache):
""" Computes the backward pass for spatial batch normalization. Inputs: - dout: Upstream derivatives, of shape (N, C, H, W) - cache: Values from the forward pass Returns a tuple of: - dx: Gradient with respect to inputs, of shape (N, C, H, W) - dgamma: Gradient with respect to scale parameter, of shape (C,) - dbeta: Gradient with respect to shift parameter, of shape (C,) """
dx, dgamma, dbeta = None, None, None
###########################################################################
# TODO: Implement the backward pass for spatial batch normalization. #
# 任务: 实现反向的SBN层 #
# HINT: You can implement spatial batch normalization using the vanilla #
# version of batch normalization defined above. Your implementation should#
# be very short; ours is less than five lines. #
# 提示: 可以按照上文中的提示实现一个原始的批量归一化过程。全部代码应小于5行 #
###########################################################################
N, C, H, W = dout.shape
dout_new = dout.transpose(0, 2, 3, 1).reshape(N*H*W, C)
dx, dgamma, dbeta = batchnorm_backward(dout_new, cache)
dx = dx.reshape(N, H, W, C).transpose(0, 3, 1, 2)
###########################################################################
# END OF YOUR CODE #
###########################################################################
return dx, dgamma, dbeta
说到底,这一层就是专门为了训练而设计的。目的就是让深度学习的参数不要太奇葩。例如:下面是卷积核的一部分
如此大跨度的结果,在反向求导的过程中会造成“梯度弥散”:那个“98亿”的数一枝独秀,要了其他参数的命。
神经网络编写建议
- 在你自己编写一个新的神经网络后,你要做的第一件事就是设计损失函数。当我们使用交叉熵损失函数时,我们预计误差为没有正则化项的随机权重。添加正则化项后,交叉损失函数值会上升。
- 损失函数设计“合理”后,使用梯度检查,来验证你写的反向传播是正确的。(您可以在每一层使用小规模的人造数据和神经元来验证。)
- 使用神经网络训练模型常常会遇到“过拟合”。造成这种现象的主要原因是:你训练的样本数量比较小。过拟合会产生非常小的训练误差,但却会造成非常高的验证误差。
结尾,再谈谈神经网络
仿生学与神经网络
起初出现的人工神经网络是在现代神经科学的基础上提出和发展起来的,旨在以一种抽象数学模型来反映人脑结构及功能的。
在CNN中,高层特征与低层特征之间并不存在变换(平移和旋转)关系。这个问题需要额外的“池化层”来解决。池化,就相当于增加照相机的视野。当代机器学习理念创始人之一Geoffrey Hinton不满CNN的效率与存在的问题,以“仿生学的思考方式”改进CNN,发表了一篇“胶囊神经网络”的论文。该论文《Dynamic Routing between Capsules》可以在Github中找到,并在GitHub的Tensorflow区中公布了实现源代码。大家普遍认为:在生产环境中,如果“胶囊神经网络”的应用有突出效果,那么它可能会取代CNN。 到时候我们再谈谈“胶囊神经网络”吧。
“从人类学,仿生学的角度构建人工智能算法,而不仅仅是单纯的数学公式”,这是一个很有意思的想法,说不定是人工智能的下一场革命。