基于keras-yolov3,原理及代码细节的理解
本文GitHub 源码:https://github.com/qqwweee/keras-yolo3
yolov3论文地址:https://pjreddie.com/media/files/papers/YOLOv3.pdf
yolov3官网:https://pjreddie.com/darknet/yolo/
最近对YOLOV3很感兴趣,看了好多资料。做了一些相关的项目。所以写下了一些心得体会,以便以后回顾查询。
YOLO,即 You Only Look Once 的缩写,是一个基于卷积神经网络(CNN)的 物体检测算法 。
yolo设计理念
yolo算法整体来说是采用CNN对目标进行end-to-end的检测。流程如图一所示
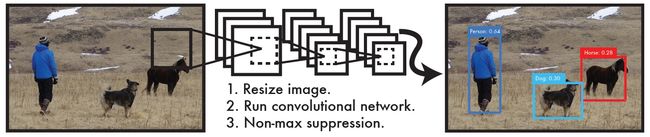
图一
具体来说(基于YOLOV3)
1:输入一张任意大小图片,保持长宽比不变的情况下,缩放至 w 或 h 达到416,再覆盖在416*416的新图上,作为网络的输入。即网络的输入是一张416*416,3通道的RGB图。
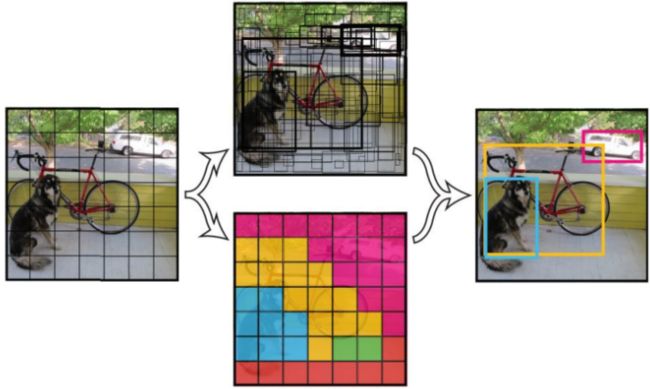
2:运行网络。YOLO的CNN网络把图片分成 S*S 个网格(yolov3多尺度预测,输出3层,每层 S * S个网格,分别为 13*13 ,26 *26 ,52*52),然后每个单元格负责去检测那些中心点落在该格子内的目标,如图二所示。 每个单元格需要预测 3*(4+1+B)个值。如果将输入图片划分为 S*S 网格,那么每层最终预测值为 S*S*3*(4+1+B) 大小的张量。 B:类别数(coco集为80类),即B=80. 3 为每层anchorbox数量,4 为边界框大小和位置(x , y , w , h )1 为置信度。
3: 通过NMS,非极大值抑制,筛选出框boxes,输出框class_boxes和置信度class_box_scores,再生成类别信息classes,生成最终的检测数据框,并返回
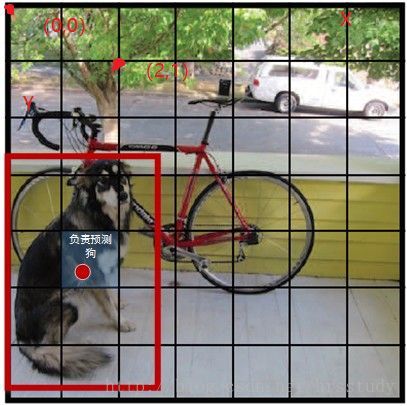
图二 图三
YOLOV3网络结构:

多尺度:
yolov3采用多尺度预测。【(13*13)(26*26)(52*52)】
•小尺度:(13*13的feature map)
- 网络接收一张(416*416)的图,经过5个步长为2的卷积来进行降采样(416 / 2ˆ5 = 13).输出(13*13)。
•中尺度 : (26*26的feature map)
- 从小尺度中的倒数第二层的卷积层上采样(x2,up sampling)再与最后一个13x13大小的特征图相加,输出(26*26)。
•大尺度: (52*52的feature map)
- 操作同中尺度输出(52*52)
好处:让网络同时学习到深层和浅层的特征,通过叠加浅层特征图相邻特征到不同通道(而非空间位置),类似于Resnet中的identity mapping。这个方法把26x26x512的特征图叠加成13x13x2048的特征图,与原生的深层特征图相连接,使模型有了细粒度特征,增加对小目标的识别能力。
anchor box:
yolov3 anchor box一共有9个,由k-means聚类得到。在COCO数据集上,9个聚类是:(10*13);(16*30);(33*23);(30*61);(62*45); (59*119); (116*90); (156*198); (373*326)。
不同尺寸特征图对应不同大小的先验框。
- 13*13feature map对应【(116*90),(156*198),(373*326)】
- 26*26feature map对应【(30*61),(62*45),(59*119)】
- 52*52feature map对应【(10*13),(16*30),(33*23)】
原因:特征图越大,感受野越小。对小目标越敏感,所以选用小的anchor box。
特征图越小,感受野越大。对大目标越敏感,所以选用大的anchor box。
边框预测:
预测tx ty tw th
- 对tx和ty进行sigmoid,并加上对应的offset(下图Cx, Cy)
- 对th和tw进行exp,并乘以对应的锚点值
- 对tx,ty,th,tw乘以对应的步幅,即:416/13, 416 ⁄ 26, 416 ⁄ 52
- 最后,使用sigmoid对Objectness和Classes confidence进行sigmoid得到0~1的概率,之所以用sigmoid取代之前版本的softmax,原因是softmax会扩大最大类别概率值而抑制其他类别概率值
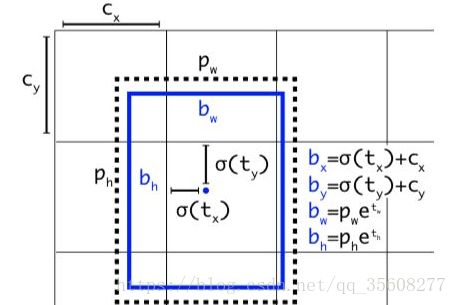
(tx,ty) :目标中心点相对于该点所在网格左上角的偏移量,经过sigmoid归一化。即值属于【0,1】。如图约(0.3 , 0.4)
(cx,cy):该点所在网格的左上角距离最左上角相差的格子数。如图(1,1)
(pw,ph):anchor box 的边长
(tw,th):预测边框的宽和高
PS:最终得到的边框坐标值是bx,by,bw,bh.而网络学习目标是tx,ty,tw,th
损失函数LOSS
- YOLO V3把YOLOV2中的Softmax loss变成Logistic loss

此图仅供参考,与YOLOV3略有不同
代码解读:源码 检测部分
Usage
- Git Clone https://github.com/qqwweee/keras-yolo3
- 从YOLO website 下载yolov3 weights
- 把darknet版本的yolo model 转换为 Keras model
- 运行 YOLO dection
YOLO类的初始化参数:
class YOLO(object): _defaults = {
"model_path": 'model_data/yolo.h5', #训练好的模型
"anchors_path": 'model_data/yolo_anchors.txt', # anchor box 9个, 从小到大排列
"classes_path": 'model_data/coco_classes.txt', #类别数
"score" : 0.3, #score 阈值
"iou" : 0.45, #iou 阈值
"model_image_size" : (416, 416), #输入图像尺寸
"gpu_num" : 1, #gpu数量
}run yolo_video.py
def detect_img(yolo):
while True:
img = input('Input image filename:') #输入一张图片
try:
image = Image.open(img)
except:
print('Open Error! Try again!')
continue
else:
r_image = yolo.detect_image(image) #进入yolo.detect_image 进行检测
r_image.show()
yolo.close_session()
detect_image()函数在yolo.py第102行
def detect_image(self, image):
start = timer()
if self.model_image_size != (None, None): #判断图片是否存在
assert self.model_image_size[0]%32 == 0, 'Multiples of 32 required'
assert self.model_image_size[1]%32 == 0, 'Multiples of 32 required'
#assert断言语句的语法格式 model_image_size[0][1]指图像的w和h,且必须是32的整数倍
boxed_image = letterbox_image(image, tuple(reversed(self.model_image_size))) #letterbox_image()定义在utils.py的第20行。输入参数(图像 ,(w=416,h=416)),输出一张使用填充来调整图像的纵横比不变的新图。
else:
new_image_size = (image.width - (image.width % 32),
image.height - (image.height % 32))
boxed_image = letterbox_image(image, new_image_size)
image_data = np.array(boxed_image, dtype='float32')
print(image_data.shape) #(416,416,3)
image_data /= 255. #归一化
image_data = np.expand_dims(image_data, 0)
#批量添加一维 -> (1,416,416,3) 为了符合网络的输入格式 -> (bitch, w, h, c)
out_boxes, out_scores, out_classes = self.sess.run(
[self.boxes, self.scores, self.classes],
#目的为了求boxes,scores,classes,具体计算方式定义在generate()函数内。在yolo.py第61行
feed_dict={ #喂参数
self.yolo_model.input: image_data, #图像数据
self.input_image_shape: [image.size[1], image.size[0]], #图像尺寸
K.learning_phase(): 0 #学习模式 0:测试模型。 1:训练模式
})
print('Found {} boxes for {}'.format(len(out_boxes), 'img'))
# 绘制边框,自动设置边框宽度,绘制边框和类别文字,使用Pillow绘图库 font = ImageFont.truetype(font='font/FiraMono-Medium.otf',
size=np.floor(3e-2 * image.size[1] + 0.5).astype('int32')) #字体
thickness = (image.size[0] + image.size[1]) // 300 #厚度
for i, c in reversed(list(enumerate(out_classes))):
predicted_class = self.class_names[c] #类别
box = out_boxes[i] #框
score = out_scores[i] #置信度
label = '{} {:.2f}'.format(predicted_class, score) #标签
draw = ImageDraw.Draw(image) #画图
label_size = draw.textsize(label, font) # 标签文字
top, left, bottom, right = box
top = max(0, np.floor(top + 0.5).astype('int32'))
left = max(0, np.floor(left + 0.5).astype('int32'))
bottom = min(image.size[1], np.floor(bottom + 0.5).astype('int32'))
right = min(image.size[0], np.floor(right + 0.5).astype('int32'))
print(label, (left, top), (right, bottom)) #边框
if top - label_size[1] >= 0: #标签文字
text_origin = np.array([left, top - label_size[1]])
else:
text_origin = np.array([left, top + 1])
# My kingdom for a good redistributable image drawing library.
for i in range(thickness): #画框
draw.rectangle(
[left + i, top + i, right - i, bottom - i],
outline=self.colors[c])
draw.rectangle( #文字背景
[tuple(text_origin), tuple(text_origin + label_size)],
fill=self.colors[c])
draw.text(text_origin, label, fill=(0, 0, 0), font=font) #文案
del draw
end = timer()
print(end - start)
return image
generate()在yolo.py第61行def generate(self):
model_path = os.path.expanduser(self.model_path) #获取model路径
assert model_path.endswith('.h5'), 'Keras model or weights must be a .h5 file.' #判断model是否以h5结尾
# Load model, or construct model and load weights.
num_anchors = len(self.anchors) #num_anchors = 9。yolov3有9个先验框
num_classes = len(self.class_names) #num_cliasses = 80。 #coco集一共80类
is_tiny_version = num_anchors==6 # default setting is_tiny_version = False
try:
self.yolo_model = load_model(model_path, compile=False) #下载model
except:
self.yolo_model = tiny_yolo_body(Input(shape=(None,None,3)), num_anchors//2, num_classes) \
if is_tiny_version else yolo_body(Input(shape=(None,None,3)), num_anchors//3, num_classes)
self.yolo_model.load_weights(self.model_path) # 确保model和anchor classes 对应
else:
assert self.yolo_model.layers[-1].output_shape[-1] == \
# model.layer[-1]:网络最后一层输出。 output_shape[-1]:输出维度的最后一维。 -> (?,13,13,255)
num_anchors/len(self.yolo_model.output) * (num_classes + 5), \
#255 = 9/3*(80+5). 9/3:每层特征图对应3个anchor box 80:80个类别 5:4+1,框的4个值+1个置信度
'Mismatch between model and given anchor and class sizes'
print('{} model, anchors, and classes loaded.'.format(model_path)) # 生成绘制边框的颜色。
hsv_tuples = [(x / len(self.class_names), 1., 1.)
#h(色调):x/len(self.class_names) s(饱和度):1.0 v(明亮):1.0
for x in range(len(self.class_names))]
self.colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples)) #hsv转换为rgb
self.colors = list(
map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)),
self.colors))
#hsv取值范围在【0,1】,而RBG取值范围在【0,255】,所以乘上255
np.random.seed(10101) # np.random.seed():产生随机种子。固定种子为一致的颜色
np.random.shuffle(self.colors) # 调整颜色来装饰相邻的类。
np.random.seed(None) #重置种子为默认
# Generate output tensor targets for filtered bounding boxes.
self.input_image_shape = K.placeholder(shape=(2, )) #K.placeholder:keras中的占位符
if self.gpu_num>=2:
self.yolo_model = multi_gpu_model(self.yolo_model, gpus=self.gpu_num)
boxes, scores, classes = yolo_eval(self.yolo_model.output, self.anchors,
len(self.class_names), self.input_image_shape,
score_threshold=self.score, iou_threshold=self.iou) #yolo_eval():yolo评估函数
return boxes, scores, classes
def yolo_eval(yolo_outputs, #模型输出,格式如下【(?,13,13,255)(?,26,26,255)(?,52,52,255)】 ?:bitch size; 13-26-52:多尺度预测; 255:预测值(3*(80+5))
anchors, #[(10,13), (16,30), (33,23), (30,61), (62,45), (59,119), (116,90), (156,198),(373,326)]
num_classes, # 类别个数,coco集80类
image_shape, #placeholder类型的TF参数,默认(416, 416);
max_boxes=20, #每张图每类最多检测到20个框同类别框的IoU阈值,大于阈值的重叠框被删除,重叠物体较多,则调高阈值,重叠物体较少,则调低阈值
score_threshold=.6, #框置信度阈值,小于阈值的框被删除,需要的框较多,则调低阈值,需要的框较少,则调高阈值;
iou_threshold=.5): #同类别框的IoU阈值,大于阈值的重叠框被删除,重叠物体较多,则调高阈值,重叠物体较少,则调低阈值
"""Evaluate YOLO model on given input and return filtered boxes."""
num_layers = len(yolo_outputs) #yolo的输出层数;num_layers = 3 -> 13-26-52
anchor_mask = [[6,7,8], [3,4,5], [0,1,2]] if num_layers==3 else [[3,4,5], [1,2,3]]
# default setting #每层分配3个anchor box.如13*13分配到【6,7,8】即【(116,90)(156,198)(373,326)】
input_shape = K.shape(yolo_outputs[0])[1:3] * 32
#输入shape(?,13,13,255);即第一维和第二维分别*32 ->13*32=416; input_shape:(416,416)
boxes = []
box_scores = []
for l in range(num_layers):
_boxes, _box_scores = yolo_boxes_and_scores(yolo_outputs[l],
anchors[anchor_mask[l]], num_classes, input_shape, image_shape)
boxes.append(_boxes)
box_scores.append(_box_scores)
boxes = K.concatenate(boxes, axis=0) #K.concatenate:将数据展平 ->(?,4)
box_scores = K.concatenate(box_scores, axis=0) # ->(?,)
mask = box_scores >= score_threshold #MASK掩码,过滤小于score阈值的值,只保留大于阈值的值
max_boxes_tensor = K.constant(max_boxes, dtype='int32') #最大检测框数20
boxes_ = []
scores_ = []
classes_ = []
for c in range(num_classes):
# TODO: use keras backend instead of tf.
class_boxes = tf.boolean_mask(boxes, mask[:, c]) #通过掩码MASK和类别C筛选框boxes
class_box_scores = tf.boolean_mask(box_scores[:, c], mask[:, c]) #通过掩码MASK和类别C筛选scores
nms_index = tf.image.non_max_suppression( #运行非极大抑制
class_boxes, class_box_scores, max_boxes_tensor, iou_threshold=iou_threshold)
class_boxes = K.gather(class_boxes, nms_index) #K.gather:根据索引nms_index选择class_boxes
class_box_scores = K.gather(class_box_scores, nms_index) #根据索引nms_index选择class_box_score)
classes = K.ones_like(class_box_scores, 'int32') * c #计算类的框得分
boxes_.append(class_boxes)
scores_.append(class_box_scores)
classes_.append(classes)
boxes_ = K.concatenate(boxes_, axis=0)
#K.concatenate().将相同维度的数据连接在一起;把boxes_展平。 -> 变成格式:(?,4); ?:框的个数;4:(x,y,w,h)
scores_ = K.concatenate(scores_, axis=0) #变成格式(?,)
classes_ = K.concatenate(classes_, axis=0) #变成格式(?,)
return boxes_, scores_, classes_
yolo_boxes_and_scores()在model.py的第176行def yolo_boxes_and_scores(feats, anchors, num_classes, input_shape, image_shape):
# feats:输出的shape,->(?,13,13,255); anchors:每层对应的3个anchor box
# num_classes: 类别数(80); input_shape:(416,416); image_shape:图像尺寸
'''Process Conv layer output'''
box_xy, box_wh, box_confidence, box_class_probs = yolo_head(feats,
anchors, num_classes, input_shape)
#yolo_head():box_xy是box的中心坐标,(0~1)相对位置;box_wh是box的宽高,(0~1)相对值;
#box_confidence是框中物体置信度;box_class_probs是类别置信度;
boxes = yolo_correct_boxes(box_xy, box_wh, input_shape, image_shape)
#将box_xy和box_wh的(0~1)相对值,转换为真实坐标,输出boxes是(y_min,x_min,y_max,x_max)的值
boxes = K.reshape(boxes, [-1, 4])
#reshape,将不同网格的值转换为框的列表。即(?,13,13,3,4)->(?,4) ?:框的数目
box_scores = box_confidence * box_class_probs
#框的得分=框的置信度*类别置信度
box_scores = K.reshape(box_scores, [-1, num_classes])
#reshape,将框的得分展平,变为(?,80); ?:框的数目
return boxes, box_scores
yolo_head()在model.py的第122行def yolo_head(feats, anchors, num_classes, input_shape, calc_loss=False): #参数同上
"""Convert final layer features to bounding box parameters."""
num_anchors = len(anchors) #num_anchors = 3
# Reshape to batch, height, width, num_anchors, box_params.
anchors_tensor = K.reshape(K.constant(anchors), [1, 1, 1, num_anchors, 2]) #reshape ->(1,1,1,3,2)
grid_shape = K.shape(feats)[1:3] # height, width (?,13,13,255) -> (13,13)
#grid_y和grid_x用于生成网格grid,通过arange、reshape、tile的组合, 创建y轴的0~12的组合grid_y,再创建x轴的0~12的组合grid_x,将两者拼接concatenate,就是grid;
grid_y = K.tile(K.reshape(K.arange(0, stop=grid_shape[0]), [-1, 1, 1, 1]),
[1, grid_shape[1], 1, 1])
grid_x = K.tile(K.reshape(K.arange(0, stop=grid_shape[1]), [1, -1, 1, 1]),
[grid_shape[0], 1, 1, 1])
grid = K.concatenate([grid_x, grid_y])
grid = K.cast(grid, K.dtype(feats)) #K.cast():把grid中值的类型变为和feats中值的类型一样
feats = K.reshape(
feats, [-1, grid_shape[0], grid_shape[1], num_anchors, num_classes + 5])
#将feats的最后一维展开,将anchors与其他数据(类别数+4个框值+框置信度)分离
# Adjust preditions to each spatial grid point and anchor size.
#xywh的计算公式,tx、ty、tw和th是feats值,而bx、by、bw和bh是输出值,如下图
box_xy = (K.sigmoid(feats[..., :2]) + grid) / K.cast(grid_shape[::-1], K.dtype(feats))
box_wh = K.exp(feats[..., 2:4]) * anchors_tensor / K.cast(input_shape[::-1], K.dtype(feats))
box_confidence = K.sigmoid(feats[..., 4:5])
box_class_probs = K.sigmoid(feats[..., 5:])
#sigmoid:σ
# ...操作符,在Python中,“...”(ellipsis)操作符,表示其他维度不变,只操作最前或最后1维;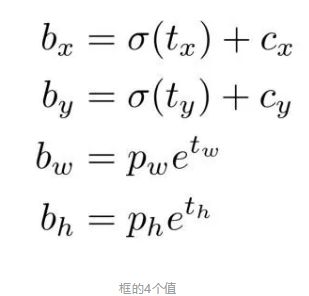
if calc_loss == True:
return grid, feats, box_xy, box_wh
return box_xy, box_wh, box_confidence, box_class_probs
yolo_correct_boxes()在model.py的第150行def yolo_correct_boxes(box_xy, box_wh, input_shape, image_shape): #得到正确的x,y,w,h
'''Get corrected boxes'''
box_yx = box_xy[..., ::-1] #“::-1”是颠倒数组的值
box_hw = box_wh[..., ::-1]
input_shape = K.cast(input_shape, K.dtype(box_yx))
image_shape = K.cast(image_shape, K.dtype(box_yx))
new_shape = K.round(image_shape * K.min(input_shape/image_shape))
offset = (input_shape-new_shape)/2./input_shape
scale = input_shape/new_shape
box_yx = (box_yx - offset) * scale
box_hw *= scale
box_mins = box_yx - (box_hw / 2.)
box_maxes = box_yx + (box_hw / 2.)
boxes = K.concatenate([
box_mins[..., 0:1], #y_min
box_mins[..., 1:2], #x_min
box_maxes[..., 0:1], #y_max
box_maxes[..., 1:2] #x_max
])
# Scale boxes back to original image shape.
boxes *= K.concatenate([image_shape, image_shape])
return boxes
OK, that's all! Enjoy it!
参考:
https://blog.csdn.net/qq_14845119/article/details/80335225
https://www.cnblogs.com/makefile/p/YOLOv3.html
https://www.colabug.com/4125223.html