室内清扫机器人部分资料收集汇总
室内清扫机器人多以算法和专利为主。下面有些资料链接:

1 https://github.com/koalazak/rest980
2 https://github.com/NickWaterton/Roomba980-Python
3 https://github.com/incmve/roomba-esp8266
4 https://github.com/MaxguN/ld37-dungeoncleaner
5 https://github.com/koalazak/dorita980
6 https://github.com/koalazak
----机器翻译----
--------
rest980
rest980创建一个http服务器来映射REST API中的所有dorita980方法,以通过HTTP请求来控制iRobot Roomba 980。
安装
$ git clone https://github.com/koalazak/rest980.git
$ cd rest980
$ npm安装
Fimrware版本
检查您的机器人固件版本!并在firmwareVersionrest980 配置中设置固件版本!
组态
该服务可以通过编辑config/default.json或设置环境变量进行配置。
配置文件(config/default.json) |
环境 | 描述 |
|---|---|---|
| 港口 | 港口 | (默认值:3000)要监听的HTTP端口。 |
| blid | BLID | (必填) Roomba bl。。* |
| 密码 | 密码 | (必填) Roomba密码。* |
| robotIP | ROBOT_IP | (可选)如果知道您的机器人IP来跳过发现并加快启动,请设置。 |
| 固件版本 | 固件版本 | (可选)设置为1或2取决于您的机器人固件版本。固件1.6.6默认为1 |
| enableLocal | ENABLE_LOCAL | (可选)如果要禁用本地API,请设置为“否”。默认为“是”。 |
| enableCloud | ENABLE_CLOUD | (可选)如果要禁用云API,请设置为“否”。默认为“是”。 |
| 活着 | 活着 | (可选)如果要在每个请求中连接并断开与机器人的连接,请设置为“否”(缓慢但为官方移动应用程序免费使用连接)。 |
| basicAuthUser | BASIC_AUTH_USER | (可选)设置为启用基本认证。必须设置用户和通行证。 |
| basicAuthPass | BASIC_AUTH_PASS | (可选)设置为启用基本认证。必须设置用户和通行证。 |
| sslKeyFile | SSL_KEY_FILE | (可选)设置密钥文件的路径以启用HTTPS。密钥和证书必须设置。(如何创建自签名证书) |
| | sslCertFile | SSL_CERT_FILE | (可选)将cert文件的路径设置为启用HTTPS。密钥和证书必须设置。(如何创建自签名证书) |
* 有关获取机器人blid和密码的更多信息和说明,请参阅dorita980
启动API服务器
$ cd rest980
$ DEBUG=rest980:* npm start
rest980:server Listening on port 3000
DEBUG=rest980:*如果你愿意,请省略 你可以随身携带npm start
或使用Docker Image
您可以使用koalazak / rest980 docker映像在docker容器中运行此服务器。例如,可以运行在Synology上。
拉码头图片:
码头拉Koalazak / rest980
运行Docker图像:
docker run -e BLID=myuser -e PASSWORD=mypass -e ROBOT_IP=myrobotIP koalazak/rest980
Dockerfile
您也可以在本地从泊坞这个构建和测试Dockerfile
docker build . -t koalazak/rest980
API文档
现在您可以在端口3000上向此服务器发出请求。有两个主要端点:local并cloud映射到dorita980本地和云方法。
错误响应:
HTTP状态500和响应:
{"message":"human message","error":{}}
本地
操作
所有清理操作都在/api/local/action/[action]使用GET方法的端点下,而不使用查询参数:
可用操作:
- 开始
- 停止
- 暂停
- 码头
- 恢复
示例:开始清理
GET http:// 192.168。1.110:3000 / api / local / action / start
成功回应:
{"ok":null,"id":23}
信息
所有信息端点正在/api/local/info/[record]使用GET方法而不使用查询参数:
可用记录:
- 任务
- 无线
- lastwireless
- SYS
- SKU
- 状态(仅在固件2中)
示例:获取当前任务变量
GET http:// 192.168。1.110:3000 / api / local / info / mission
成功回应:
{ "ok":
{ "flags": 0,
"cycle": "none",
"phase": "charge",
"pos": { "theta": 179, "point": {"x": 102, "y": -13} },
"batPct": 99,
"expireM": 0,
"rechrgM": 0,
"error": 0,
"notReady": 0,
"mssnM": 0,
"sqft": 0 },
"id": 2 }
配置
所有配置端点正在/api/local/config/[configName]使用GET方法来获取当前配置和POST方法来设置新配置。
可用的configName:
- ptime(仅固件1中的GET)
- bbrun(只有GET)
- 云(仅GET)
- langs(只有GET
preferences,用于设置lang) - 周
- 时间(固件1中的POST Y GET)固件2中只有GET)
- 优先
- carpetBoost / auto(仅POST
preferences)用于获取当前配置) - carpetBoost /性能(仅POST
preferences)用于获取当前配置) - carpetBoost / eco(只有POST
preferences,用于获取当前配置) - edgeClean / on(仅POST
preferences,用于获取当前配置) - edgeClean / off(仅POST
preferences)用于获取当前配置) - cleaningPasses / auto(仅POST
preferences)用于获取当前配置) - cleaningPasses / one(仅POST
preferences)用于获取当前配置) - cleaningPasses / two(仅POST
preferences)用于获取当前配置) - alwaysFinish / on(仅POST
preferences,用于获取当前配置) - alwaysFinish / off(仅POST
preferences)用于获取当前配置)
有关每种方法和版本固件的响应和身体参数,请参见dorita980文档。
例子:
获取固件首选项1:
GET http:// 192.168。1.110:3000 / api / local / config / preferences
成功回应:
{ok :
{flags : 1024,//请参阅dorita980文档中的清洁首选项表。
lang : 2,
时区: '美洲/布宜诺斯艾利斯',
名称: ' myRobotName ',
cleanPreferences : {
carpetBoost : ' auto ',// 'auto','performance','
eco'edgeClean : true,
cleanPasses : ' 1 ',// '1','2','
auto'alwaysFinish : true
}
},
id : 2 }
有关固件2中的偏好设置,请参阅dorita980文档。
在固件1中设置首选项:
POST http:// 192.168。1.110:3000 / api / local / config / preferences
身体:
{
"flags": 1107, // See Cleaning Preferences table in dorita980 documentation.
"lang": 2,
"timezone": "America/Buenos_Aires",
"name": "myRobotName"
}
成功回应:
{"ok":null,"id":293}
有关固件2中的偏好设置,请参阅dorita980文档。
将清洁通行证设置为两个:
POST http:// 192.168。1.110:3000 / api / local / config / cleaningPasses / two
身体:
{}
成功回应:
{"ok":null,"id":293}
云(仅适用于固件1.6.x)
GET在info没有查询参数的所有端点中使用:
- / API /云/资讯/状态
- / API /云/信息/历史
- / API /云/信息/ missionHistory
GET在action没有查询参数的所有端点中使用:
- / API /云/动作/清洁
- / API /云/动作/快速
- / API /云/动作/斑点
- / API /云/动作/码头
- / API /云/动作/启动
- / API /云/动作/停止
- / API /云/动作/暂停
- / API /云/动作/简历
- / API /云/动作/唤醒
- / API /云/动作/复位
- / API /云/动作/发现
- / API /云/动作/擦拭
- / API /云/动作/睡眠
- / API /云/动作/关
- / API /云/动作/ fbeep
例:
GET http:// 192.168。1.110:3000 / api / cloud / action / clean
成功回应:
{"status":"OK","method":"multipleFieldSet"}
主机图像或文件
您可以将图像或文件添加到public/文件夹以提供静态文件。
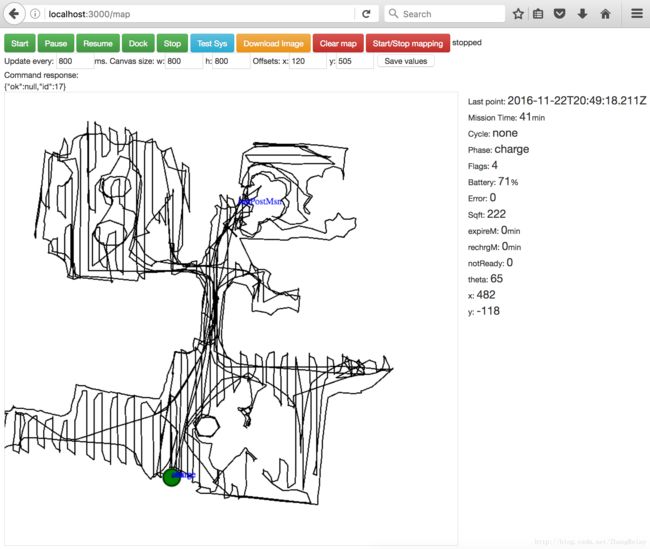
实时地图(实验)
访问 http://serverIP:3000/map浏览器,您可以玩这个很酷的实验
--------
Roomba980的Python
非官方iRobot Roomba 980 python库(SDK)。
感谢https://github.com/koalazak/dorita980,其中大部分内部工作来自于。
这是版本1.0,所以它可能是错误的!
忠告
如果您喜欢python980,它适用于您,我建议您阻止互联网访问您的机器人,以避免OTA固件更新。新的固件更改可能导致python980停止工作。可以使用路由器上的家长控制选项来执行阻止固件更新。
当发布新的固件时,您可以来这里验证python980是否仍然兼容。一旦python980兼容,您可以临时启用互联网访问您的机器人来获得固件升级。
固件2.xx注释
此库仅用于固件2.xx 检查您的机器人版本! NEW 现在支持Python 2.7和Python 3.6(感谢pschmitt添加Python 3兼容性)
仅支持本地连接,云连接是未来的项目。该项目是为了允许Openhab2控制,所以如果您将Roomba整合到Openhab2中,您可以从任何地方控制它。
由于当时只有一个连接可以进入Roomba本地mqtt服务器,如果您以连续模式运行,应用程序将通过云连接。在周期模式下,应用程序可以在本地连接,但是库会自动重新连接,直到应用程序断开连接。
测试固件版本为V2.2.5-2 / Ubuntu 14.04
特征
- 轻松获取用户名/密码
- 自动发现机器人IP(可选)
- 本地API控件
- 远程API控制(通过您的MQTT代理)
- 简化清洁首选项设置。
- NOT固件1.6.x兼容。
- 固件2.xx兼容。
- 多个Roombas支持(但未测试)
- 连续或定期连接(允许本地应用访问)
- 实时地图
- 地图显示错误的位置,bin已满,已取消运行
- 自动地图翻译和旋转(清洁完成/错误等)
- 专为openhab2设计兼容性
实时地图
OpenCV的
如果您安装了OpenCV,库将使用它来呈现最终的地图(完成/错误),它使用PIL for Live Maps,因此最终的地图看起来更好。这使用了大量的处理能力/内存,我不知道如果你在RPi或其他有限的平台上尝试这样做会发生什么!此外,如果启用调试模式(-D),则每次报告新的坐标(运行时每秒钟左右),绘制中间地图(edges.png,final_map.png等)。这消耗了大量的资源你被警告!。
PIL
请使用最新版本的枕头(至少V 4.1.1),在早期版本的文本处理中存在一些令人讨厌的内存泄漏,这将迅速耗尽所有的RAM并使程序无响应。如果检测到较早版本的PIL,图书馆将发出警告。
如果您没有安装PIL,即使您有OpenCV,系统也不会绘制地图(即使已启用)。PIL用于基本图像处理。如果您没有特别启用地图,则不会绘制任何地图。roomba.py使用地图,但是类默认是禁用地图,所以在你自己的脚本中,如果你想要地图,你必须启用它们(在创建对象之后)。
依赖
此脚本/库旨在将/从本地MQTT服务器转发到roomba数据/命令(这是可选的)。在这种情况下,您需要安装paho-mqtt
<须藤> PIP安装PAHO-MQTT
对于地图绘制,您至少需要安装PIL(最好是最新版本的枕头)
<须藤> PIP安装枕
对于花哨的地图,您需要安装openCV(V2或V3,但未使用V3进行测试)。安装这个可能很复杂,所以我把它留给你。地图的作品没有它,但它更好。
安装
首先您需要安装python 2.7 或 python 3.6(感谢pschmitt添加Python 3兼容性),然后:
克隆此存储库:
git clone https://github.com/NickWaterton/Roomba980-Python.git
cd Roomba980-Python
运行./roomba.py -h以获得选项。你会得到什么
nick @ proliant:〜 / Scripts / roomba / Roomba980-Python $ ./roomba.py -h
用法:roomba.py [-h] [-f CONFIGFILE] [-n ROOMBANAME] [-t TOPIC]
[-T BROKERFEEDBACK] [-C BROKERCOMMAND] [-S BROKERSETTING]
[-b BROKER] [-p PORT] [-U USER] [-P PASSWORD] [-R ROOMBAIP]
[-u BLID] [-w ROOMBAPASSWORD] [-i INDENT] [-l LOG] [-e] [-D]
[-r] [-j] [-c] [-d DELAY] [-m] [-M MAPPATH] [-s MAPSIZE]
[-I ICONPATH] [-x EXCLUDE] [--version]
将Roomba 980的MQTT数据转发到本地 MQTT代理
可选参数:
-h,--help显示此帮助消息并退出
-f CONFIGFILE,--configfile CONFIGFILE
配置文件名(默认值:./config.ini)
-n ROOMBANAME,--roombaName ROOMBANAME
可选Roomba名称(默认值:“ ”)
-t主题, - 主题主题
Roomba MQTT主题订阅(可以使用通配符#
和+默认值:#)
-T BROKERFEEDBACK, - BrokerFeedback BROKERFEEDBACK
经纪人主题发布反馈意见(默认值:
/的Roomba /反馈)
-C BROKERCOMMAND, - BrokerCommand BROKERCOMMAND
代理发布命令的代理主题(默认值:
/伦巴/命令
-S BROKERSETTING, - 经纪人设置BROKERSETTING
经纪人发布设置的主题(默认值:
/伦巴/设置
-b BROKER, - 经纪人经销商
MQTT代理的ipaddress(默认值:无)
-p PORT,--port端口MQTT代理端口号(默认值:1883)
-U USER,--user USER MQTT代理用户名(默认值:无)
-P PASSWORD, - 密码密码
MQTT代理密码(默认值:无)
-R ROOMBAIP,--roombaIP ROOMBAIP
Roomba 980的ipaddress(默认值:无)
-u BLID,--blid BLID Roomba 980 blid(默认值:无)
-w ROOMBAPASSWORD,--roomba密码ROOMBAPASSWORD
Roomba 980密码(默认值:无)
-i INDENT,--indent INDENT
默认缩进= auto
-l LOG,--log LOG路径/日志文件的名称(默认值:./Roomba.log)
-e,--echo回到控制台(默认值:True)
-D,--debug调试模式
-r,--raw将原始数据输出到mqtt,不解码json数据
-j,--pretty_print 在日志中打印json
-c, - 连续连接到Roomba(默认值:True)
-d DELAY, - 延迟延迟
断开周期为不连续的连接
(默认值:1000ms)
-m,--drawmap Draw Roomba清除地图(默认值:True)
-M MAPPATH,--mapPath MAPPATH
将地图存储到的位置(默认值:./)
-s MAPSIZE,--mapSize MAPSIZE
地图尺寸,码头偏移和倾斜的地图。(800,1500)
是大小,(0,0)是码头位置,在中心
的地图,0是地图的旋转,0是
roomba的旋转。使用单引号
串。(默认值:'(800,1500,0,0,0,0)')
-I ICONPATH,--iconPath ICONPATH
图标的位置。(默认值:“ ./ ”)
-x EXCLUDE,--exclude EXCLUDE
排除有这个主题在他们(默认:“ ”)
--version秀节目“ S版号并退出
快速开始
有了在船坞的roomba 980和充电(并连接到wifi),站在roomba并运行
./roomba.py
要么
python roomba.py
按照说明,脚本将尝试找到roomba,获取IP,blid和密码 - 然后将其保存到本地配置文件。如果这样工作,程序将开始显示来自Roomba的消息,并且每隔几秒打印一次master_state。结果将记录到日志文件(默认情况下为Roomba.log)。
在未来的运行中(一旦成功),这些值将从配置文件中获取,因此您只需执行一次。您可以在命令行上手动指定这些,一些示例提供了启动bash脚本。我建议您尝试地图大小(如果您正在使用地图),因为这是一个不完全自动的变量。码头的大小,位置取决于您的房屋布局。地图布局的语法是(map x,map y,dock x,dock y,map rotation,roomba rotation)。参见示例。
示例输出
python标准日志记录模块支持日志记录
[I 2017-05-09 08:52:10,792 ] *******************
[I 2017-05-09 08:52:10,792] *计划开始*
[我2017-05-09 08:52:10,792 ] *******************
[I 2017-05-09 08:52:10,792] Paho MQTT版本:1002003
[我2017-05-09 08:52:10,792] < CNTRL C >退出
[I 2017-05-09 08:52:10,792] Roomba 980 MQTT数据接口
[I 2017-05-09 08:52:10,792]连接到经纪人
[I 2017-05-09 08:52:10,792]创建Roomba对象192.168.100.181
[I 2017-05-09 08:52:10,793]连续连接
[I 2017-05-09 08:52:10,793]连接Roomba 192.168.100.181
[I 2017-05-09 08:52:10,793]发布DECODED数据
[I 2017-05-09 08:52:10,793]地图:启用地图
[I 2017-05-09 08:52:10,793]地图:打开现有的线路图像
[I 2017-05-09 08:52:10,814]地图:开辟存在的问题形象
[I 2017-05-09 08:52:10,830]地图:home_pos:(100,775)
[I 2017-05-09 08:52:10,834] MAP:初始化完成
[I 2017-05-09 08:52:10,835]连接
[I 2017-05-09 08:52:13,243] Roomba Connected
[I 2017-05-09 08:52:13,262]收到Roomba数据: wifistat,{ “ state ”:{ “ reported ”:{ “ netinfo ”:{ “ dhcp ”:true,“ addr ”:3232261301,“ mask ”:4294967040,“ gw ”:3232261121,“ dns1 ”:3232261121,“ dns2 ”:0,“ bssid ”:“ 6c:b0:ce:14:2f:cd “,” sec “:4}}}}
[I 2017-05-09 08:52:13,307]收到Roomba资料: wifistat,{ “ state ”:{ “报告”:{ “ wifistat ”:{ “ wifi ”:1,“ uap ”:false,“ cloud ”:1}}}}
[I 2017-05-09 08:52:13,308]收到Roomba数据: wifistat,{ “ state ”:{ “报告”:{ “ netinfo ”:{ “ dhcp ”:true,“ addr ”:3232261301,“ mask ”:4294967040,“ gw ”:3232261121,“ dns1 ”:3232261121,“ dns2 ”:0,“ bssid ”:“ 6c:b0:ce:14:2f:cd “,” sec “:4}}}}
[I 2017-05-09 08:52:13,309]收到Roomba资料: wifistat,{ “ state ”:{ “ reported ”:{ “ wlcfg ”:{ “ sec ”:7,“ ssid ”:“ 7761746572746F6E73 ” }} }}
[I 2017-05-09 08:52:13,309]收到Roomba资料: wifistat,{ “ state ”:{ “据报”:{ “ mac ”:“ f0:03:8c:13:24:5b ” }}}
[I 2017-05-09 08:52:13,310]收到Roomba资料: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “ reported ”:{ “ country ”:“ US ” }}}
[I 2017-05-09 08:52:13,325]收到Roomba数据: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “ reported ”:{ “ cloudEnv ”:“ prod ” }}}
[I 2017-05-09 08:52:13,331]收到Roomba数据: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “ reported ”:{ “ svcEndpoints ”:{ “ svcDeplId ”:“ v011 “ }}}}
[I 2017-05-09 08:52:13,429]收到Roomba数据: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “ reported ”:{ “ mapUploadAllowed ”:true}}}
[I 2017-05-09 08:52:13,483]收到Roomba数据: wifistat,{ “ state ”:{ “ reported ”:{ “ localtimeoffset ”:-240,“ utctime ”:1494334341,“ pose ”:{ “ theta “:-179,” point “:{ ” x “:181,” y “:-13}}}}}
[I 2017年5月9日08:52:13533]所获的Roomba数据: $ AWS /东西/ 3117850851637850 /阴影/更新,{ “状态”:{ “报道”:{ “ batPct ”:100, “坞”:{ “已知”:false},“ bin ”:{ “ present ”:true,“ full ”:false},“ audio ”:{ “ active ”:false}}}}
[I 2017-05-09 08:52:13,689]收到Roomba数据: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “已报告”:{ “ cleanMissionStatus ”:{ “ cycle ”:“ none “,” phase “:” charge “,” expireM “:0,” rechrgM “:0,” error “:0,”未就绪“:0, ” mssnM “:0, ”平方英尺“:0, ”引发剂“:” localApp “ ” nMssn “:109}, ”语言“:0, ” noAutoPasses “:假,” NOPP “:假,“ ecoCharge ”:false}}}:0,“ initiator ”:“ localApp ”,“ nMssn ”:109},“ language ”:0,“ noAutoPasses ”:false,“ noPP ”:false,“ ecoCharge ”:false}}}:0,“ initiator ”:“ localApp ”,“ nMssn ”:109},“ language ”:0,“ noAutoPasses ”:false,“ noPP ”:false,“ ecoCharge ”:false}}}noAutoPasses “:false,” noPP “:false,” ecoCharge “:false}}}noAutoPasses “:false,” noPP “:false,” ecoCharge “:false}}}
[I 2017-05-09 08:52:13,693]更新状态为:充电
[I 2017年5月9日08:52:13693] MAP:接收:new_co_ords:{ ' ý ':181,' X ':-13,' THETA ':-179} old_co_ords:{ ' ý ':181,' x ':-13,' theta ':-179}相位:充电状态:充电
[I 2017-05-09 08:52:13,693]地图:无视新阶段的收费阶段
[我2017年5月9日08:52:13756]所获的Roomba数据: $ AWS /事/ 3117850851637850 /阴影/更新,{ “状态”:{ “报道”:{ “ vacHigh ”:假的,“ binPause ”:真,“ carpetBoost ”:真实的,“ openOnly ”:假的,“ twoPass ”:假的,“ schedHold ”:假的,“ lastCommand ”:{ “命令”:“ dock ”,“ time ”:1494260716,“ initiator ”:“ localApp ” }}}}
[I 2017-05-09 08:52:13,821]收到Roomba数据: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “ reported ”:{ “ langs ”:[{ “ en-US ”:0},{ “ FR-FR ”:1},{ “ ES-ES ”:2},{ “ DE-DE ”:3},{ “它-IT ”:4}], “ bbnav ”:{ “ aMtrack ”:98,“nGoodLmrks “:5, ”再次“:7, ” aExpo “:56}, ” bbpanic “:{ ”恐慌“:[11,8,6,8,6]}, ” bbpause “:{ ”暂停“:[ 0,14,0,0,0,0,17,0,4,0]}}}}bbpause “:{ ”暂停“:[0,14,0,0,0,0,17,0,4,0]}}}}bbpause “:{ ”暂停“:[0,14,0,0,0,0,17,0,4,0]}}}}
[I 2017-05-09 08:52:14,231]收到Roomba数据: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “ reported ”:{ “ bbmssn ”:{ “ nMssn ”:109,“ nMssnOk ”:30,“ nMssnC ”:78,“ nMssnF ”:0,“ aMssnM ”:14,“ aCycleM ”:15},“ bbrstinfo ”:{ “nNavRst “:3, ” nMobRst “:0, ”导致“:” 0000 “ }}}}
[I 2017年5月9日08:52:14242]所获的Roomba数据: $ AWS /东西/ 3117850851637850 /阴影/更新,{ “状态”:{ “报道”:{ “帽”:{ “姿势”:1,“ OTA ”:2, “多路径”:2, “ carpetBoost ”:1, “ PP ”:1, “ binFullDetect ”:1, “ langOta ”:1, “地图“:1, ”边缘“:1, ”生态“:1}, ” SKU “:” R980020 “ ” batteryType “:”里斯片“ ” soundVer “:” 31 “ ” uiSwVer “:” 4582 “,“ navSwVer ”:“ 01.11.02 ”,“ wifiSwVer ”:“ 20923 ” }}}
[我的2017-05-09 08:52:14,245]收到Roomba数据: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “ reported ”:{ “ mobilityVer ”:“ 5420 ”,“ bootloaderVer ”:“ 4042 ”,“ umiVer ”:“ 6 ”,“ softwareVer ”:“ v2.2.5-2 ”,“TZ “:{ ”事件“:[{ ” DT “:0, ”关“:-300},{ ” DT “:0, ”关“:-240},{ ” DT “:0, ”关“: -300}],“ ver ”:3},“ timezone ”:“ America / Toronto ”,“ name ”:“ Roomba ”}}}
[I 2017-05-09 08:52:14,263]收到Roomba数据: $ aws / things / 3117850851637850 / shadow / update,{ “ state ”:{ “已报告”:{ “ cleanSchedule ”:{ “ cycle ”:[ “无“,”开始“,”开始“,”开始“,”开始“,”开始“,”无“],“ h ”:[0,9,9,9,9,0],“ m ”:[0,0,0,0,0,0,0]},“ bbchg3 ”:{ “ avgMin “:81,” hOnDock “:448,” nAvail “:163,” estCap “:12311,” nLithChrg “:38,” nNimhChrg “:0,” nDocks “:45}}}}m “:[0,0,0,0,0,0]},” bbchg3 “:{ ” avgMin “:81,” hOnDock “:448,” nAvail “:163,” estCap “:12311 ” nLithChrg “:38,” nNimhChrg “:0,” nDocks “:45}}}}m “:[0,0,0,0,0,0]},” bbchg3 “:{ ” avgMin “:81,” hOnDock “:448,” nAvail “:163,” estCap “:12311 ” nLithChrg “:38,” nNimhChrg “:0,” nDocks “:45}}}}hOnDock “:448,” nAvail “:163,” estCap “:12311,” nLithChrg “:38,” nNimhChrg “:0,” nDocks “:45}}}}hOnDock “:448,” nAvail “:163,” estCap “:12311,” nLithChrg “:38,” nNimhChrg “:0,” nDocks “:45}}}}
[I 2017年5月9日08:52:14304]所获的Roomba数据: $ AWS /东西/ 3117850851637850 /阴影/更新,{ “状态”:{ “报道”:{ “ bbchg ”:{ “ nChgOk ”:34,“ nLithF ”:0, “中止”:[0,0,0]}, “ bbswitch ”:{ “ nBumper ”:41275, “ nClean ”:37, “ nSpot ”:12, “nDock “:45,” nDrops “:187}}}}
[I 2017年5月9日08:52:14310]所获的Roomba数据: $ AWS /东西/ 3117850851637850 /阴影/更新,{ “状态”:{ “报道”:{ “ bbrun ”:{ “小时”:48,“分钟”:18, “平方英尺”:190, “ nStuck ”:7, “ nScrubs ”:75, “ nPicks ”:199, “ nPanics ”:51, “nCliffF “:871,” nCliffR “:348,” nMBStll “:1,” nWStll “:3,” nCBump “:0},” bbsys “:{ ” hr “:518,” min “:55}}}}“ bbsys ”:{ “ hr ”:518,“ min ”:55}}}}“ bbsys ”:{ “ hr ”:518,“ min ”:55}}}}
[I 2017-05-09 08:52:15,406]收到Roomba资料: wifistat,{ “ state ”:{ “ reported ”:{ “ signal ”:{ “ rssi ”:-46,“ snr ”:39}}} }
如何获取用户名/ blid和密码
您可以按快速入门的方式自动获取,也可以运行:
./getpassword.py
有或没有你的roomba的IP地址。
./getpassword.py -R < roomba IP >
您还可以指定除默认值以外的配置文件(选项为-h)。结果显示并保存到配置文件。
API
API调用是(有关如何使用密码类的示例,请参阅getpassword.py):
类
password(address = ' 255.255.255.255 ',file = “。\ config.ini ”)
Roomba(address = None,blid = None,password = None,topic = “#”,continuous = True,clean = False,cert_name = “ ”,roombaName = “ ”,file = “ ./config.ini ”)
Roomba方法
连接()
断开()
send_command(命令)
set_preference(偏好设置)
set_mqtt_client(mqttc = None,brokerFeedback = “ ”)
set_options(raw = False,indent = 0,pretty_print = False)
enable_map(enable = False,mapSize = “(800,1500,0,0,0,0)”,mapPath = “ ./ ”,iconPath = “ ./ ”,
home_icon_file = “ home.png ”,
roomba_icon_file = “ roomba .png “,
roomba_error_file = ” roombaerror.png “,
roomba_cancelled_file = ”roombacancelled.png “ roomba_battery_file = ”的Roomba-charge.png “ bin_full_file = ” binfull.png “,roomba_size =(50,50),draw_edges = 15,auto_rotate = 真),roomba_size =(50,50),draw_edges = 15,auto_rotate = 真),
roomba_size =(50,50),draw_edges = 15,auto_rotate = 真)
make_icon(input = “ ./roomba.png ”,output = “ ./roomba_mod.png ”)
数据结构
#布尔值
roomba_connected
bin_full
#字符串
cleanMissionStatus_phase
当前状态
错误信息
#字典
co_ords
master_state
笔记
如果你有多个roomba的话,这些应该被支持还没有被测试 - 我只有一个roomba!。每个roomba都有自己的名字,这将自动用于区分它们。反馈发布到\roomba\feedback\,命令转到\roomba\command\和设置\roomba\setting\。地图等已经提供给他们。您可以在自己的脚本中手动指定对象中的roomba名称,在这种情况下也同样适用。
在你的python脚本中使用库
这两个脚本都在examples目录中,如simple.py和complexity.py。要使用它们,将它们从示例复制到主roomba.py目录(或者将roomba.py拷贝到示例中)。编辑它们以包括您自己的roomba ip地址,blid和密码,然后运行python simple.py。对于“complex.py”,您还需要添加您的mqtt代理adddress,用户名和密码。然后跑python complicated.py
简单版本
从 roomba 进口 Roomba
#取消注释要运行的选项,并用您自己的值替换地址,blid和roombaPassword
address = “ 192.168.100.181 ”
blid = “ 3835850251647850 ”
roombaPassword = “:1:1493319243:gOizXpQ4lcdSoD1xJ ”
myroomba = Roomba(address,blid,roombaPassword)
#或myroomba = Roomba()#如果你有一个配置文件 - 如果你不
myroomba.connect()
myroomba.set_preference(“ carpetBoost ”,“ true ”)
# myroomba.set_preference(“twoPass”,“false”)
# myroomba.send_command(“start”)
# myroomba.send_command(“stop”)
# myroomba.send_command(“dock”)
进口 JSON,时间
为我在 范围(5):
打印 json.dumps(myroomba.master_state,缩进= 2)
时间(1)
myroomba.disconnect()
更复杂的版本
从 roomba 导入 Roomba
导入 paho.mqtt.client 作为 mqtt
import time
import json
#把自己的价值观在这里
券商 = “本地主机” # MQTT经纪人的IP
用户 = “用户” # MQTT用户名
密码 = “密码” # MQTT密码
#如果不使用本地MQTT券商经纪人=无
地址 = “ 192.168.100.181 ”
blid = “ 3515850261627850 ”
roombaPassword = “:1:1492379243:gOiyXpQ4lbRoD1xJ ”
def broker_on_connect(client,userdata,flags,rc):
print(“ Broker Connected with result code ” + str(rc))
# subscribe to roomba feedback
if rc == 0:
mqttc.subscribe(brokerCommand)
mqttc.subscribe(brokerSetting)
DEF broker_on_message(诱蚊诱卵,OBJ,MSG):
#发布到的Roomba
如果 “命令” 中 msg.topic:
打印(“接收到的指令:%S ” % STR(msg.payload))
myroomba.send_command(str(msg.payload))
elif “ msg.topic ”中的“设置”:
print(“ Received SETTING:%s ” % str(msg.payload))
cmd = str(msg.payload).split()
myroomba.set_preference(cmd [ 0 ],cmd [ 1 ])
DEF broker_on_publish(诱蚊诱卵,物镜,中间):
通
高清 broker_on_subscribe(诱蚊诱卵,OBJ,中期,granted_qos):
打印(“经纪人认购:%S %S ” %(STR(MID),STR(granted_qos)))
DEF broker_on_disconnect(诱蚊诱卵,OBJ,RC):
打印(“代理断开”)
高清 broker_on_log(诱蚊诱卵,OBJ,水平,字符串):
打印(串)
mqttc = 无
如果经纪人是 不是 无:
brokerCommand = “ / roomba / command ”
brokerSetting = “ / roomba / setting ”
brokerFeedback = “ / roomba / feedback ”
#连接到代理
mqttc = mqtt.Client()
#分配事件回调
mqttc.on_message = broker_on_message
mqttc.on_connect = broker_on_connect
mqttc.on_disconnect = broker_on_disconnect
mqttc.on_publish = broker_on_publish
mqttc.on_subscribe = broker_on_subscribe
尝试:
mqttc.username_pw_set(用户名,密码) #把自己的MQTT的用户和密码,在这里,如果你使用的是他们,否则注释掉
mqttc.connect(经纪人,1883年,60)#平MQTT经纪人每60秒如果没有数据从这个公布脚本。
除了 例外 : e:
print(“无法连接到MQTT代理:%s ” % e)
mqttc = 无
myroomba =伦巴() #在Linux上的Debian系统连接所需minnimum,会读取配置文件连接
# myroomba =伦巴(地址,blid,roombaPassword,主题= “#”,连续=真,干净=假cert_name =”。 /ca-certificates.crt“)#手动设置东西
#所有这些都是可选的,如果你不包括它们,默认值将会很好
#如果你使用地图
myroomba.enable_map( enable = True, mapSize = “(800,1650,-300,-50,2, 0) “在MapPath = ” ./ “ iconPath = ” ./ “) #使活地图,类默认是没有地图
,如果经纪人是 不是 无:
myroomba.set_mqtt_client(mqttc,brokerFeedback)#如果要将Roomba数据发布到您自己的mqtt代理(默认情况下不是)如果您有多个roomba,并分配一个roombaName,则将其添加到此主题中(即brokerFeedback / roombaName)
#终于连接到Roomba - (必填!)
myroomba.connect()
print(“ 退出 ”)
print(“订阅/ roomba / feedback /#查看已发布数据”)
尝试:
如果 mqttc 是 不 无:
mqttc.loop_forever()
else:
while True:
print(“ Roomba Data:%s ” % json.dumps(myroomba.master_state,indent = 2))
时间(5)
除了(KeyboardInterrupt,SystemExit):
print(“ System exit Received - Exiting program ”)
myroomba.disconnect()
如果 mqttc 是 不 无:
mqttc.disconnect()
数据/信息反馈
master_state启动空,并填写时间,默认情况下每5分钟完整发布一次(但是更新即将发布)
master_state应该包含:
{
“ state ”: {
“ reported ”: {
“ netinfo ”: {
“ dhcp ”: true,
“ addr ”: 3232261301,
“ mask ”: 4294967040,
“ gw ”: 3232261121,
“ dns1 ”: 3232261121,
“ dns2 ”: 0,
“ bssid ”: “ 6c:b0:ce:14:2f:cd ”,
“ sec ”: 4
},
“ wifistat ”: {
“ wifi ”: 1,
“ uap ”: false,
“云”: 1
},
“ wlcfg ”: {
“ sec ”: 7,
“ ssid ”: “ 7761746572746F6E73 ”
},
“ mac ”: “ f0:03:8c:13:24:5b ”,
“ country ”: “ US ”,
“ cloudEnv ”: “ prod ”,
“ svcEndpoints ”: {
“ svcDeplId ”: “ v011 ”
},
“ mapUploadAllowed ”: true,
“ localtimeoffset ”: - 240,
“ utctime ”: 1494331734,
“ pose ”: {
“ θ ”: - 179,
“ point ”: {
“ x ”: 181,
“ y ”: - 13
}
},
“ batPct ”: 100,
“ dock ”: {
“已知”: false
},
“ bin ”: {
“ present ”: true,
“ full ”: false
},
“ audio ”: {
“ active ”: true
},
“ cleanMissionStatus ”: {
“循环”: “无”,
“相”: “充电”,
“ expireM ”: 0,
“ rechrgM ”: 0,
“错误”: 0,
“未就绪”: 0,
“ mssnM ”: 0,
“ sqft ”: 0,
“ initiator ”: “ localApp ”,
“ nMssn ”: 109
},
“语言”: 0,
“ noAutoPasses ”: 假的,
“ NOPP ”: 假的,
“ ecoCharge ”: 假的,
“ vacHigh ”: 假的,
“ binPause ”: 真实的,
“ carpetBoost ”: 真实的,
“ openOnly ”: 假的,
“twoPass “: false,
” schedHold “: false,
” lastCommand “: { ” command “: ” dock “, ” time “: 1494260716, ” initiator “: ” localApp ““ lastCommand ”: { “ command ”:“ dock ”, “ time ”:1494260716, “ initiator ”:“ localApp ”“ lastCommand ”: {
“ command ”:“ dock ”,
“ time ”:1494260716,
“ initiator ”:“ localApp ”启动器“:” localApp “启动器“:” localApp “
},
“ langs ”: [
{
“ en-US ”: 0
},
{
“ fr-FR ”: 1
},
{
“ es-ES ”: 2
},
{
“ de-DE ”: 3
},
{
“ it-IT ”: 4
}
]
“ bbnav ”: {
“ aMtrack ”: 98,
“ nGoodLmrks ”: 5,
“ aGain ”: 7,
“ aExpo ”: 56
},
“ bbpanic ”: {
“恐慌”: [
11,
8,
6,
8,
6
]
},
“ bbpause ”: {
“暂停”: [
0,
14,
0,
0,
0,
0,
17,
0,
4,
0
]
},
“ bbmssn ”: {
“ nMssn ”: 109,
“ nMssnOk ”: 30,
“ nMssnC ”: 78,
“ nMssnF ”: 0,
“ aMssnM ”: 14,
“ aCycleM ”: 15
},
“ bbrstinfo ”: {
“ nNavRst ”: 3,
“ nMobRst ”: 0,
“导致”: “ 0000 ”
},
“ cap ”: {
“ pose ”: 1,
“ ota ”: 2,
“ multiPass ”: 2,
“ carpetBoost ”: 1,
“ pp ”: 1,
“ binFullDetect ”: 1,
“ langOta ”: 1,
“ maps ”: 1,
“边缘”: 1,
“生态”: 1
},
“ SKU ”: “ R980020 ”,
“ batteryType ”: “里斯片”,
“ soundVer ”: “ 31 ”,
“ uiSwVer ”: “ 4582 ”,
“ navSwVer ”: “ 02年11月1日”,
“ wifiSwVer ”: “ 20923 ”,
“mobilityVer “: ” 5420 “ ” bootloaderVer “: ” 4042 “ ” umiVer “: ” 6 “ ” softwareVer “: ” v2.2.5-2 “ ” TZ “: { ”事件“: [“ bootloaderVer ”:“ 4042 ”, “ umiVer ”:“ 6 ”, “ softwareVer ”:“ v2.2.5-2 ”, “ TZ ”: { “事件”: [“ bootloaderVer ”:“ 4042 ”,
“ umiVer ”:“ 6 ”, “ softwareVer ”:“ v2.2.5-2 ”, “ TZ ”: { “事件”: [, “ softwareVer ”:“ v2.2.5-2 ”, “ tz ”: { “ events ”: [,
“ softwareVer ”:“ v2.2.5-2 ”,
“ tz ”: {
“ events ”: [
{
“ dt ”: 0,
“关”: - 300
},
{
“ dt ”: 0,
“ off ”: - 240
},
{
“ dt ”: 0,
“关”: - 300
}
]
“ ver ”: 3
},
“时区”: “美国/多伦多”,
“名”: “伦巴”,
“ cleanSchedule ”: {
“循环”: [
“无”,
“开始”,
“开始”,
“开始”,
“开始”,
“开始”,
“无”
]
“ ħ ”: [
0,
9,
9,
9,
9,
9,
0
]
“米”: [
0,
0,
0,
0,
0,
0,
0
]
},
“ bbchg3 ”: {
“ avgMin ”: 81,
“ hOnDock ”: 448,
“ nAvail ”: 163,
“ estCap ”: 12311,
“ nLithChrg ”: 38,
“ nNimhChrg ”: 0,
“ nDocks ”: 45
},
“ bbchg ”: {
“ nChgOk ”: 34,
“ nLithF ”: 0,
“中止”: [
0,
0,
0
]
},
“ bbswitch ”: {
“ nBumper ”: 41275,
“ nClean ”: 37,
“ nSpot ”: 12,
“ nDock ”: 45,
“ nDrops ”: 187
},
“ bbrun ”: {
“ hr ”: 48,
“ min ”: 18,
“ sqft ”: 190,
“ nStuck ”: 7,
“ nScrubs ”: 75,
“ nPicks ”: 199,
“ nPanics ”: 51,
“ nCliffsF ”: 871,
“ nCliffR ”: 348,
“ nMBStll ”: 1,
“ nWStll ”: 3,
“ nCBump ”: 000
},
“ bbsys ”: {
“ hr ”: 518,
“ min ”: 11
},
“ signal ”: {
“ rssi ”: - 36,
“ snr ”: 53
}
}
}
}
在原始模式下,来自Roomba的json直接传递到mqtt主题(通常为/ roomba / feedback),在正常模式下,每个json项被解码并作为一个单独的主题发布。要查看发布的主题及其值运行:
mosquitto_sub -v -t / roomba / feedback / #
输出应如下所示:
/ roomba / feedback / netinfo_dhcp True
/ roomba / feedback / netinfo_addr 3232261301
/ roomba / feedback / netinfo_mask 4294967040
/ roomba / feedback / netinfo_gw 3232261121
/ roomba / feedback / netinfo_dns1 3232261121
/ roomba / feedback / netinfo_dns2 0
/ roomba / feedback / netinfo_bssid 6c:b0:ce:14:2f:cd
/ roomba / feedback / netinfo_sec 4
/ roomba / feedback / wifistat_wifi 1
/ roomba / feedback / wifistat_uap False
/ roomba / feedback / wifistat_cloud 1
/ roomba / feedback / netinfo_dhcp True
/ roomba / feedback / netinfo_addr 3232261301
/ roomba / feedback / netinfo_mask 4294967040
/ roomba / feedback / netinfo_gw 3232261121
/ roomba / feedback / netinfo_dns1 3232261121
/ roomba / feedback / netinfo_dns2 0
/ roomba / feedback / netinfo_bssid 6c:b0:ce:14:2f:cd
/ roomba / feedback / netinfo_sec 4
/ roomba / feedback / wlcfg_sec 7
/ roomba / feedback / wlcfg_ssid 7761746572746F6E73
/ roomba / feedback / mac f0:03:8c:13:24:5b
/ roomba / feedback / country US
/ roomba / feedback / cloudEnv prod
/ roomba / feedback / svcEndpoints_svcDeplId v011
/ roomba / feedback / mapUploadAllowed True
/ roomba / feedback / localtimeoffset -240
/ roomba / feedback / utctime 1494330872
/ roomba / feedback / pose_theta -179
/ roomba / feedback / pose_point_x 181
/ roomba / feedback / pose_point_y -13
/ roomba / feedback / batPct 100
/ roomba / feedback / dock_known False
/ roomba / feedback / bin_present True
/ roomba / feedback / bin_full False
/ roomba / feedback / audio_active False
/ roomba / feedback / cleanMissionStatus_cycle none
/ roomba / feedback / cleanMissionStatus_phase charge
/ roomba / feedback / cleanMissionStatus_expireM 0
/ roomba / feedback / cleanMissionStatus_rechrgM 0
/ roomba / feedback / cleanMissionStatus_error 0
/ roomba / feedback / cleanMissionStatus_notReady 0
/ roomba / feedback / cleanMissionStatus_mssnM 0
/ roomba / feedback / cleanMissionStatus_sqft 0
/ roomba / feedback / cleanMissionStatus_initiator localApp
/ roomba / feedback / cleanMissionStatus_nMssn 109
/ roomba / feedback / language 0
/ roomba / feedback / noAutoPasses False
/ roomba / feedback / noPP虚假
/ roomba / feedback / ecoCharge False
/ roomba /反馈/状态充电
/ roomba / feedback / vacHigh False
/ roomba / feedback / binPause True
/ roomba / feedback / carpetBoost True
/ roomba / feedback / openOnly False
/ roomba / feedback / twoPass False
/ roomba / feedback / schedHold False
/ roomba / feedback / lastCommand_command码头
/ roomba / feedback / lastCommand_time 1494260716
/ roomba / feedback / lastCommand_initiator localApp
/ roomba /反馈/状态充电
/的Roomba /反馈/ LANGS [('的en-US ',0),(' FR-FR ',1),(' ES-ES ',2),('脱DE ',3),('它-IT ',4)]
/ roomba / feedback / bbnav_aMtrack 98
/ roomba / feedback / bbnav_nGoodLmrks 5
/ roomba / feedback / bbnav_aGain 7
/ roomba / feedback / bbnav_aExpo 56
/ roomba / feedback / bbpanic_panics [11,8,6,8,6]
/ roomba / feedback / bbpause_pauses [0,14,0,0,0,0,17,0,4,0]
/ roomba /反馈/状态充电
/ roomba / feedback / bbmssn_nMssn 109
/ roomba / feedback / bbmssn_nMssnOk 30
/ roomba / feedback / bbmssn_nMssnC 78
/ roomba / feedback / bbmssn_nMssnF 0
/ roomba / feedback / bbmssn_aMssnM 14
/ roomba / feedback / bbmssn_aCycleM 15
/ roomba / feedback / bbrstinfo_nNavRst 3
/ roomba / feedback / bbrstinfo_nMobRst 0
/ roomba / feedback / bbrstinfo_causes 0000
/ roomba /反馈/状态充电
/ roomba / feedback / cap_pose 1
/ roomba / feedback / cap_ota 2
/ roomba / feedback / cap_multiPass 2
/ roomba / feedback / cap_carpetBoost 1
/ roomba / feedback / cap_pp 1
/ roomba / feedback / cap_binFullDetect 1
/ roomba / feedback / cap_langOta 1
/ roomba / feedback / cap_maps 1
/ roomba / feedback / cap_edge 1
/ roomba / feedback / cap_eco 1
/ roomba / feedback / sku R980020
/ roomba / feedback / batteryType lith
/ roomba / feedback / soundVer 31
/ roomba / feedback / uiSwVer 4582
/ roomba / feedback / navSwVer 01.11.02
/ roomba / feedback / wifiSwVer 20923
/ roomba /反馈/状态充电
/ roomba / feedback / mobilityVer 5420
/ roomba / feedback / bootloaderVer 4042
/ roomba / feedback / umiVer 6
/ roomba / feedback / softwareVer v2.2.5-2
/ roomba / feedback / tz_events [(' dt ',0),(' off ',-300),(' dt ',0),(' off ',-240),(' dt ',0),(' off ',-300)]
/ roomba / feedback / tz_ver 3
/ roomba / feedback / timezone美洲/多伦多
/ roomba / feedback / name Roomba
/ roomba /反馈/状态充电
/ roomba / feedback / cleanSchedule_cycle [ ' none ',' start ',' start ',' start ',' start ',' start ',' none ' ]
/ roomba / feedback / cleanSchedule_h [0,9,9,9,9,9,0]
/ roomba / feedback / cleanSchedule_m [0,0,0,0,0,0,0]
/ roomba / feedback / bbchg3_avgMin 81
/ roomba / feedback / bbchg3_hOnDock 448
/ roomba / feedback / bbchg3_nAvail 163
/ roomba / feedback / bbchg3_estCap 12311
/ roomba / feedback / bbchg3_nLithChrg 38
/ roomba / feedback / bbchg3_nNimhChrg 0
/ roomba / feedback / bbchg3_nDocks 45
/ roomba /反馈/状态充电
/ roomba / feedback / bbchg_nChgOk 34
/ roomba / feedback / bbchg_nLithF 0
/ roomba / feedback / bbchg_aborts [0,0,0]
/ roomba / feedback / bbswitch_nBumper 41275
/ roomba / feedback / bbswitch_nClean 37
/ roomba / feedback / bbswitch_nSpot 12
/ roomba / feedback / bbswitch_nDock 45
/ roomba / feedback / bbswitch_nDrops 187
/ roomba /反馈/状态充电
/ roomba / feedback / bbrun_hr 48
/ roomba / feedback / bbrun_min 18
/ roomba / feedback / bbrun_sqft 190
/ roomba / feedback / bbrun_nStuck 7
/ roomba / feedback / bbrun_nScrubs 75
/ roomba / feedback / bbrun_nPicks 199
/ roomba / feedback / bbrun_nPanics 51
/ roomba / feedback / bbrun_nCliffsF 871
/ roomba / feedback / bbrun_nCliffsR 348
/ roomba / feedback / bbrun_nMBStll 1
/ roomba / feedback / bbrun_nWStll 3
/ roomba / feedback / bbrun_nCBump 0
/ roomba / feedback / bbsys_hr 517
/ roomba / feedback / bbsys_min 57
/ roomba /反馈/状态充电
/ roomba / feedback / signal_rssi -35
/ roomba / feedback / signal_snr 54
/ roomba /反馈/状态充电
/ roomba / feedback / signal_rssi -36
/ roomba / feedback / signal_snr 53
/ roomba /反馈/状态充电
另外state并且error_message是由类派生的。
命令/设置
命令
- 命令是:
- “开始”
- “停止”
- “暂停”
- “恢复”
- “码头”
设置
- 设置有:
- 地毯真正
- 真的真的
- openOnly true 这是边缘清洁 - 设置为false以启用边缘清洁
- noAutoPasses是真的
- twoPass真的
- binPause为true
你发布这个字符串到你的mqtt代理主题/ roomba / command或/ roomba /设置(或任何你已经定义,如果你更改这些默认)Ubuntu示例(假设代理在你的本地主机) - 应该适用于任何linux系统安装了蚊子
mosquitto_pub -t “ / roomba / command ” -m “ start ”
mosquitto_pub -t “ / roomba / setting ” -m “ carpetBoost true ”
或直接从python脚本调用(参见上面的简单示例)。
Openhab / Openhab2界面
这是我的Openhab2文件:
项目
/* Roomba items */
Group roomba_items "Roomba" (gGF)
/* Roomba Commands */
String roomba_command "Roomba" (roomba_items) {mqtt=">[proliant:/roomba/command:command:*:${command}]", autoupdate=false}
/* Settings */
Switch roomba_edgeClean "Edge Clean [%s]" (roomba_items) {mqtt=">[proliant:/roomba/setting:command:ON:openOnly false],>[proliant:/roomba/setting:command:OFF:openOnly true],<[proliant:/roomba/feedback/openOnly:state:MAP(inverse_switch.map)]", autoupdate=false}
Switch roomba_carpetBoost "Auto carpet Boost [%s]" (roomba_items) {mqtt=">[proliant:/roomba/setting:command:ON:carpetBoost true],>[proliant:/roomba/setting:command:OFF:carpetBoost false],<[proliant:/roomba/feedback/carpetBoost:state:MAP(switch.map)]", autoupdate=false}
Switch roomba_vacHigh "Vacuum Boost [%s]" (roomba_items) {mqtt=">[proliant:/roomba/setting:command:ON:vacHigh true],>[proliant:/roomba/setting:command:OFF:vacHigh false],<[proliant:/roomba/feedback/vacHigh:state:MAP(switch.map)]", autoupdate=false}
Switch roomba_noAutoPasses "Auto Passes [%s]" (roomba_items) {mqtt=">[proliant:/roomba/setting:command:ON:noAutoPasses false],>[proliant:/roomba/setting:command:OFF:noAutoPasses true],<[proliant:/roomba/feedback/noAutoPasses:state:MAP(inverse_switch.map)]", autoupdate=false}
Switch roomba_twoPass "Two Passes [%s]" (roomba_items) {mqtt=">[proliant:/roomba/setting:command:ON:twoPass true],>[proliant:/roomba/setting:command:OFF:twoPass false],<[proliant:/roomba/feedback/twoPass:state:MAP(switch.map)]", autoupdate=false}
Switch roomba_binPause "Always Complete (even if bin is full) [%s]" (roomba_items) {mqtt=">[proliant:/roomba/setting:command:ON:binPause false],>[proliant:/roomba/setting:command:OFF:binPause true],<[proliant:/roomba/feedback/binPause:state:MAP(inverse_switch.map)]", autoupdate=false}
/* Roomba Feedback */
String roomba_softwareVer "Software Version [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/softwareVer:state:default]"}
Number roomba_batPct "Battery [%d%%]" (roomba_items, Battery) {mqtt="<[proliant:/roomba/feedback/batPct:state:default]"}
String roomba_lastcommand "Last Command [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/lastCommand_command:state:default]"}
Switch roomba_bin_present "Bin Present [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/bin_present:state:MAP(switch.map)]"}
Switch roomba_full "Bin Full [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/bin_full:state:MAP(switch.map)]"}
/* Mission values */
String roomba_mission "Mission [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_cycle:state:default]"}
Number roomba_nMssn "Cleaning Mission Number [%d]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_nMssn:state:default]"}
String roomba_phase "Phase [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_phase:state:default]"}
String roomba_initiator "Initiator [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_initiator:state:default]"}
Switch roomba_error "Error [%]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_error:state:MAP(switchFromMqtt.map)]"}
String roomba_errortext "Error Message [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/error_message:state:default]"}
Number roomba_mssnM "Cleaning Elapsed Time [%d m]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_mssnM:state:default]"}
Number roomba_sqft "Square Ft Cleaned [%d]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_sqft:state:default]"}
Number roomba_expireM "Mission Recharge Time [%d m]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_expireM:state:default]"}
Number roomba_rechrgM "Remaining Time To Recharge [%d m]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanMissionStatus_rechrgM:state:default]"}
String roomba_status "Status [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/state:state:default]"}
Dimmer roomba_percent_complete "Mission % Completed [%d%%]" (roomba_items)
DateTime roomba_lastmissioncompleted "Last Mission Completed [%1$ta %1$tR]"
/* Schedule */
String roomba_cycle "Day of Week [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanSchedule_cycle:state:default]"}
String roomba_cleanSchedule_h "Hour of Day [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanSchedule_h:state:default]"}
String roomba_cleanSchedule_m "Minute of Hour [%s]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/cleanSchedule_m:state:default]"}
String roomba_cleanSchedule "Schedule [%s]" (roomba_items)
/* General */
Switch roomba_control "Roomba ON/OFF [%s]" (roomba_items)
Number roomba_theta "Theta [%d]" (roomba_items) {mqtt="<[proliant:/roomba/feedback/pose_theta:state:default]"}
Number roomba_x "X [%d]" 网站地图
Group item=roomba_items {
Switch item=roomba_command mappings=[start="Start",stop="Stop",pause="Pause",dock="Dock",resume="Resume"]
Switch item=roomba_control
Group label="Map" icon="map" {
Frame label="Map" {
//Image icon="map" url="http://your_OH_ip_address:port/static/map.png" label="Map" refresh=1000
Webview icon="map" url="http://your_OH_ip_address:port/static/roomba_map.html" height=40 label="Map"
}
}
Group label="Settings" icon="select"{
Text item=roomba_cleanSchedule
Switch item=roomba_edgeClean
Switch item=roomba_carpetBoost
Switch item=roomba_vacHigh visibility=[roomba_carpetBoost==OFF]
Switch item=roomba_noAutoPasses
Switch item=roomba_twoPass visibility=[roomba_noAutoPasses==OFF]
Switch item=roomba_binPause
}
Frame label="Status" {
Text item=roomba_softwareVer
Text item=roomba_batPct
Text item=roomba_phase
Text item=roomba_lastcommand
Switch item=roomba_full mappings=[ON="FULL", OFF="Not Full"]
Switch item=roomba_bin_present mappings=[OFF="Removed", ON="Installed"]
Text item=roomba_rssi
Text item=roomba_lastheardfrom
}
Frame label="Mission" {
Text item=roomba_status
Text item=roomba_rechrgM visibility=[roomba_status=="Recharging"]
Text item=roomba_mission
Text item=roomba_percent_complete
Switch item=roomba_error mappings=[ON="ERROR!", OFF="Normal"]
Text item=roomba_errortext
Text item=roomba_mssnM
Text item=roomba_sqft
Text item=roomba_nMssn
Text item=roomba_lastmissioncompleted
Text item=roomba_initiator
}
Frame label="Location" {
Text item=roomba_theta
Text item=roomba_x
Text item=roomba_y
}
}
变换
/etc/openhab2/transform/switch.map
ON=ON
OFF=OFF
0=OFF
1=ON
True=ON
False=OFF
true=ON
false=OFF
-=Unknown
NULL=Unknown
/etc/openhab2/transform/inverse_switch.map
ON=OFF
OFF=ON
0=ON
1=OFF
True=OFF
False=ON
true=OFF
false=ON
-=Unknown
NULL=Unknown
/etc/openhab2/transform/switchFromMqtt.map
-=Unknonwn
NULL=Unknown
OFF=OFF
0=OFF
1=ON
2=ON
3=ON
4=ON
5=ON
6=ON
7=ON
8=ON
9=ON
10=ON
11=ON
12=ON
13=ON
14=ON
15=ON
16=ON
17=ON
18=ON
19=ON
20=ON
21=ON
22=ON
23=ON
24=ON
25=ON
26=ON
27=ON
28=ON
29=ON
30=ON
31=ON
32=ON
33=ON
34=ON
35=ON
36=ON
37=ON
38=ON
39=ON
40=ON
41=ON
42=ON
43=ON
44=ON
45=ON
46=ON
47=ON
48=ON
49=ON
50=ON
51=ON
52=ON
53=ON
54=ON
55=ON
56=ON
57=ON
58=ON
59=ON
60=ON
61=ON
62=ON
63=ON
64=ON
65=ON
66=ON
67=ON
68=ON
69=ON
70=ON
71=ON
72=ON
73=ON
74=ON
75=ON
76=ON
77=ON
78=ON
79=ON
80=ON
81=ON
82=ON
83=ON
84=ON
85=ON
86=ON
87=ON
88=ON
89=ON
90=ON
91=ON
92=ON
93=ON
94=ON
95=ON
96=ON
97=ON
98=ON
99=ON
100=ON
101=ON
102=ON
103=ON
104=ON
105=ON
106=ON
107=ON
108=ON
109=ON
110=ON
111=ON
112=ON
113=ON
114=ON
115=ON
116=ON
117=ON
118=ON
119=ON
120=ON
121=ON
122=ON
123=ON
124=ON
125=ON
126=ON
127=ON
128=ON
129=ON
130=ON
131=ON
132=ON
133=ON
134=ON
135=ON
136=ON
137=ON
138=ON
139=ON
140=ON
141=ON
142=ON
143=ON
144=ON
145=ON
146=ON
147=ON
148=ON
149=ON
150=ON
151=ON
152=ON
153=ON
154=ON
155=ON
156=ON
157=ON
158=ON
159=ON
160=ON
161=ON
162=ON
163=ON
164=ON
165=ON
166=ON
167=ON
168=ON
169=ON
170=ON
171=ON
172=ON
173=ON
174=ON
175=ON
176=ON
177=ON
178=ON
179=ON
180=ON
181=ON
182=ON
183=ON
184=ON
185=ON
186=ON
187=ON
188=ON
189=ON
190=ON
191=ON
192=ON
193=ON
194=ON
195=ON
196=ON
197=ON
198=ON
199=ON
200=ON
201=ON
202=ON
203=ON
204=ON
205=ON
206=ON
207=ON
208=ON
209=ON
210=ON
211=ON
212=ON
213=ON
214=ON
215=ON
216=ON
217=ON
218=ON
219=ON
220=ON
221=ON
222=ON
223=ON
224=ON
225=ON
226=ON
227=ON
228=ON
229=ON
230=ON
231=ON
232=ON
233=ON
234=ON
235=ON
236=ON
237=ON
238=ON
239=ON
240=ON
241=ON
242=ON
243=ON
244=ON
245=ON
246=ON
247=ON
248=ON
249=ON
250=ON
251=ON
252=ON
253=ON
254=ON
255=ON
256=ON
ON=ON
规则
这些使用我的一个函数getTimestamp,这里是:
val Functions$Function2 getTimestamp = [ //function (lambda) to get a timestamp. Returns formatted string and optionally updates an item
item,
date_format |
var date_time_format = date_format
if(date_format == "" || date_format == null) date_time_format = "%1$ta %1$tT" //default format Day Hour:Minute:Seconds
var String Timestamp = String::format( date_time_format, new Date() )
if(item != NULL && item != null) {
var Integer time = now().getMillis() //current time (/1000?)
var cal = new java.util.GregorianCalendar()
cal.setTimeInMillis(time) //timestamp in unix format
var t = new DateTimeType(cal)
if(item instanceof DateTimeItem) {
postUpdate(item, t)
logInfo("Last Update", item.name + " DateTimeItem updated at: " + Timestamp )
}
else if(item instanceof StringItem) {
postUpdate(item, Timestamp)
logInfo("Last Update", item.name + " StringItem updated at: " + Timestamp )
}
else
logWarn("Last Update", item.name + " is not DateTime or String - not updating")
}
Timestamp
]
这里是我的roomba规则,其中一些假设你有电子邮件和pushNotification设置:
/* Roomba Rules */
rule "Roomba start and stop"
when
Item roomba_control received command
then
logInfo("Roomba", "Roomba ON/OFF received command: " + receivedCommand)
if (receivedCommand == ON)
sendCommand(roomba_command, "start")
if (receivedCommand == OFF) {
sendCommand(roomba_command, "stop")
Thread::sleep(1000)
sendCommand(roomba_command, "dock")
}
end
rule "Roomba Auto Boost Control"
when
Item roomba_carpetBoost changed
then
logInfo("Roomba", "Roomba Boost changed to: Auto " + roomba_carpetBoost.state + " Manual: " + roomba_vacHigh.state)
if (roomba_carpetBoost.state == ON && roomba_vacHigh.state == ON)
sendCommand(roomba_vacHigh, OFF)
end
rule "Roomba Manual Boost Control"
when
Item roomba_vacHigh changed
then
logInfo("Roomba", "Roomba Boost changed to: Auto " + roomba_carpetBoost.state + " Manual: " + roomba_vacHigh.state)
if (roomba_carpetBoost.state == ON && roomba_vacHigh.state == ON)
sendCommand(roomba_carpetBoost, OFF)
end
rule "Roomba Auto Passes Control"
when
Item roomba_noAutoPasses changed or
Item roomba_twoPass changed
then
logInfo("Roomba", "Roomba Passes changed to: Auto " + roomba_noAutoPasses.state + " Manual: " + roomba_twoPass.state)
if (roomba_noAutoPasses.state == ON && roomba_twoPass.state == ON)
sendCommand(roomba_twoPass, OFF)
end
rule "Roomba Last Update Timestamp"
when
Item roomba_rssi received update
then
getTimestamp.apply(roomba_lastheardfrom, "%1$ta %1$tR")
end
rule "Roomba Bin Full"
when
Item roomba_full changed from OFF to ON
then
val Timestamp = getTimestamp.apply(roomba_lastheardfrom, "%1$ta %1$tR")
pushNotification("Roomba", "BIN FULL reported by Roomba at: " + Timestamp)
end
rule "Roomba Error"
when
Item roomba_error changed from OFF to ON
then
val Timestamp = getTimestamp.apply(roomba_lastheardfrom, "%1$ta %1$tR")
pushNotification("Roomba", "ERROR reported by Roomba at: " + Timestamp)
sendMail(mailTo, "Roomba", "ERROR reported by Roomba at: " + Timestamp + "See attachment for details", "http://your_OH_ip:port/static/map.png")
end
rule "Roomba percent completed"
when
Item roomba_sqft received update
then
var sqft_completed = roomba_sqft.state as Number
var max_sqft = 470 //insert max square footage here
var min_sqft = 0
var Number completed_percent = 0
if (sqft_completed < min_sqft) {completed_percent = 0)
else if (sqft_completed > max_sqft) {completed_percent = 100}
else {
completed_percent = (((sqft_completed - min_sqft) * 100) / (max_sqft-min_sqft)).intValue
}
logInfo("Roomba", "Roomba percent complete "+roomba_sqft.state+" of "+max_sqft.toString+" calculated as " + completed_percent.toString + "%")
postUpdate(roomba_percent_complete,completed_percent)
end
rule "Roomba update command"
when
Item roomba_phase received update
then
logInfo("Roomba", "Roomba phase received update: " + roomba_phase.state}
switch(roomba_phase.state) {
case "run" : postUpdate(roomba_command,"start")
case "hmUsrDock" : postUpdate(roomba_command,"pause")
case "hmMidMsn" : postUpdate(roomba_command,"pause")
case "hmPostMsn" : {
postUpdate(roomba_command,"dock")
getTimestamp.apply(roomba_lastmissioncompleted, "%1$ta %1$tR")
}
case "charge" : postUpdate(roomba_command,"dock")
case "stop" : postUpdate(roomba_command,"stop")
case "pause" : postUpdate(roomba_command,"pause")
case "stuck" : postUpdate(roomba_command,"stop")
}
end
rule "Roomba Notifications"
when
Item roomba_status changed
then
logInfo("Roomba", "Roomba status is: " + roomba_status.state}
val Timestamp = getTimestamp.apply(roomba_lastheardfrom, "%1$ta %1$tR")
switch(roomba_status.state) {
case "Running" : pushNotification("Roomba", "Roomba is RUNNING at: " + Timestamp)
case "Docking - End Mission" : {
createTimer(now.plusSeconds(2)) [|
pushNotification("Roomba", "Roomba has FINISHED cleaning at: " + Timestamp)
sendMail(mailTo, "Roomba", "Roomba has FINISHED cleaning at: " + Timestamp + "See attachment for details", "http://your_OH_ip:port/static/map.png")
]
}
case "Stuck" : {
pushNotification("Roomba", "HELP! Roomba is STUCK at: " + Timestamp)
sendMail(mailTo, "Roomba", "HELP! Roomba is STUCK at: " + Timestamp + "See attachment for location", "http://your_OH_ip:port/static/map.png")
}
}
end
rule "Roomba Schedule Display"
when
Item roomba_cycle changed or
Item roomba_cleanSchedule_h changed or
Item roomba_cleanSchedule_m changed
then
logInfo("Roomba", "Roomba Schedule: Day " + roomba_cycle.state + " Hour: " + roomba_cleanSchedule_h.state + " Minute: " + roomba_cleanSchedule_m.state)
var String schedule = ""
var String days = (roomba_cycle.state as StringType).toString
var String hours = (roomba_cleanSchedule_h.state as StringType).toString
var String minutes = (roomba_cleanSchedule_m.state as StringType).toString
val ArrayList daysOfWeek = newArrayList("Sun","Mon","Tues","Wed","Thur","Fri","Sat")
val ArrayList daysList = new ArrayList(days.replace("[","").replace("]","").replace("'","").split(","))
val ArrayList hoursList = new ArrayList(hours.replace("[","").replace("]","").split(","))
val ArrayList minutesList = new ArrayList(minutes.replace("[","").replace("]","").split(","))
daysList.forEach[ item, i |
if(item.trim() == "start") {
schedule += daysOfWeek.get(i) + ": " + hoursList.get(i) + ":" + minutesList.get(i) + ", "
}
]
postUpdate(roomba_cleanSchedule, schedule.trim())
end
图标
我还在/ etc / openhab2 / icons / classic中有各种各样的roomba图标
这些是在openhab /图标,将它们复制到/ etc / openhab2 / icons / classic。项目和转型也在那里。
一般
start_openhab_roomba是一个bash脚本,可以在openhab2的正确位置(在Ubuntu上)启动roomba,您可能需要根据安装Openhab2的方式为其他系统(Windows,RPi等)更改此位置。您还需要安装mqtt绑定。在上述规则/站点地图替换your_OH_ip:port您自己的Openhab2 ip和端口 - 从任何地方使用,这些应该是外部可用(从您自己的网络外部)地址,否则您只能从您自己的网络(电子邮件附件应该工作)。
待办事项的
我正在使用我在网上找到的一些roomba图标,如果你有更好的roomba图标,请让我知道,我知道这些不是Roomba 980图标...更新这里显示的示例图,它是一个较旧的版本,新的更好一点。编写一个不错的web界面脚本。完成!(还有网页地图显示)。请参阅roomba_map.html- 对于openhab2将其复制到/ etc / openhab2 / html(与map.png相同的位置),现在可以通过http://your_OH_ip:port/static/roomba_map.html浏览器查看实时地图。我使用一个子目录来避免混乱根html目录,只需在路径名中保持一致,并确保在运行roomba.py之前存在目录(具有写权限)!
--------
--------
--------
--------