【POJ3470】Walls(线段树)(扫描线)
题目大意
本义
有n堵墙,m只智障鸟,给出墙端点坐标,鸟坐标,墙一定是平行于坐标轴,横着或竖着,每只鸟都会选一个离自己最近的墙撞过去,鸟一定是平行于坐标轴飞行,只能横着或竖着飞,问每堵墙被几只鸟撞过。
题目没说的坑爹问题:
- 坐标可以为负数
- 坐标可能大于INT_MAX
- 鸟可能初始就卡在某堵墙里(坐标在墙的端点或连线上,给这堵墙算一次)
- 鸟可以在墙的延长线上,可以直接顺着延长线撞到墙上
- 鸟不会有多个墙来选择
- 鸟有可能撞不到任何墙
题解
扫描线,从左往右时,视为鸟固定往左飞,用线段树记录这根扫描线遇到的墙,标记墙的领土,如下图。
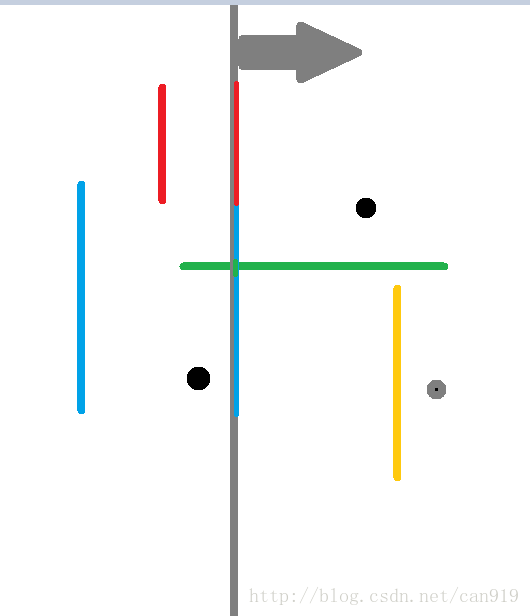
灰色的扫描线向右扫描,扫描线上标有颜色的是线段树标记的墙的领土,如果此时碰到鸟,则鸟一直向右飞碰到的墙可直接用线段树查询。如马上碰到右边的黑点,查询线段树,就可得知它将撞到红色墙。继续扫描过程中,碰到黄色墙,将在对应线段树区域标为黄色,然后灰色点就可以撞到黄色墙。注意,横着的绿色墙也需要标记,在线段树上那一个点被标为绿色。
具体实现细节见代码,有注释。
代码
#includebool Bird_cmpy_g(Bird a,Bird b)
{return a.ybool Bird_cmpx_l(Bird a,Bird b)
{return a.x>b.x||(a.x==b.x&&a.y>b.y);}
bool Bird_cmpy_l(Bird a,Bird b)
{return a.y>b.y||(a.y==b.y&&a.x>b.x);}
struct Wall
{
int id;
Bird a,b;
inline void read()
{a.read();b.read();}
inline bool mode()
{return a.x==b.x;}
};
bool Wall_cmpx_g(Wall a,Wall b)
{return Bird_cmpx_g(a.a,b.a);}
bool Wall_cmpy_g(Wall a,Wall b)
{return Bird_cmpy_g(a.a,b.a);}
bool Wall_cmpx_l(Wall a,Wall b)
{return Bird_cmpx_l(a.a,b.a);}
bool Wall_cmpy_l(Wall a,Wall b)
{return Bird_cmpy_l(a.a,b.a);}
class SegTree
{
static int N;
int wid[MAXN*12];
public:
inline void Init(int n)
{
memset(wid,0,sizeof wid);
N=n;
}
void Insert(int L,int R,int val,int id=1,int l=0,int r=N)
{
if(rreturn;
if(L<=l&&r<=R)
{
wid[id]=val;
return;
}
if(wid[id]!=-1)
wid[id*2]=wid[id*2+1]=wid[id];
Insert(L,R,val,id*2,l,(l+r)/2);
Insert(L,R,val,id*2+1,(l+r)/2+1,r);
if(wid[id*2]==-1||wid[id*2+1]==-1||wid[id*2]!=wid[id*2+1])
wid[id]=-1;
}
int Query(int pos,int id=1,int l=0,int r=N)
{
if(rreturn -1;
if(wid[id]!=-1)
return wid[id];
int q1=Query(pos,id*2,l,(l+r)/2);
int q2=Query(pos,id*2+1,(l+r)/2+1,r);
if(q1==-1)return q2;
return q1;
}
};
Wall wall[MAXN];
Bird bird[MAXN];
long long mapx[MAXN*3],mapy[MAXN*3];
int x_cnt,y_cnt;
long long dis[MAXN];
int ans[MAXN],hitid[MAXN];
SegTree ST;
int SegTree::N;
int main()
{
int N,M;
scanf("%d%d",&N,&M);
//输入,初始化,记录x,y,用于离散化
for(int i=1;i<=N;i++)
{
wall[i].read();
wall[i].id=i;
mapx[x_cnt++]=wall[i].a.x;
mapx[x_cnt++]=wall[i].b.x;
mapy[y_cnt++]=wall[i].a.y;
mapy[y_cnt++]=wall[i].b.y;
}
for(int i=1;i<=M;i++)
{
bird[i].read();
bird[i].id=i;
mapx[x_cnt++]=bird[i].x;
mapy[y_cnt++]=bird[i].y;
}
memset(dis,0x7F,sizeof dis);
//排序,离散化墙,鸟的坐标
sort(mapx,mapx+x_cnt);
sort(mapy,mapy+y_cnt);
for(int i=1;i<=N;i++)
{
wall[i].a.x=lower_bound(mapx,mapx+x_cnt,wall[i].a.x)-mapx;
wall[i].a.y=lower_bound(mapy,mapy+y_cnt,wall[i].a.y)-mapy;
wall[i].b.x=lower_bound(mapx,mapx+x_cnt,wall[i].b.x)-mapx;
wall[i].b.y=lower_bound(mapy,mapy+y_cnt,wall[i].b.y)-mapy;
}
for(int i=1;i<=M;i++)
{
bird[i].x=lower_bound(mapx,mapx+x_cnt,bird[i].x)-mapx;
bird[i].y=lower_bound(mapy,mapy+y_cnt,bird[i].y)-mapy;
}
int wid,bid;
//设置墙同一直线总是坐标小的在前,方便排序
for(int i=1;i<=N;i++)
{
if(wall[i].mode()&&wall[i].a.y>wall[i].b.y)
swap(wall[i].a.y,wall[i].b.y);
if(!wall[i].mode()&&wall[i].a.x>wall[i].b.x)
swap(wall[i].a.x,wall[i].b.x);
}
//初始化,按x从小到大排序
wid=bid=1;
ST.Init(3*N);
sort(wall+1,wall+N+1,Wall_cmpx_g);
sort(bird+1,bird+M+1,Bird_cmpx_g);
//扫描线,从左到右,从下到上,鸟向左撞
while(wid<=N||bid<=M)
{
//添加墙的地盘
if(wid<=N&&(bid>M||Bird_cmpx_g(wall[wid].a,bird[bid])))
{
ST.Insert(wall[wid].a.y,wall[wid].b.y,wid);
wid++;
}
//更新鸟的答案
else if(bid<=M)
{
int qid=ST.Query(bird[bid].y);
if(qid!=0)
{
long long d=max(0LL,mapx[bird[bid].x]-mapx[wall[qid].b.x]);
if(dif(dis[bird[bid].id]!=0x7F7F7F7F7F7F7F7FLL)
ans[hitid[bird[bid].id]]--;
ans[wall[qid].id]++;
dis[bird[bid].id]=d;
hitid[bird[bid].id]=wall[qid].id;
}
}
bid++;
}
}
//初始化,按y从小到大排序
wid=bid=1;
ST.Init(3*N);
sort(wall+1,wall+N+1,Wall_cmpy_g);
sort(bird+1,bird+M+1,Bird_cmpy_g);
//扫描线,从下到上,从左到右,鸟向下撞
while(wid<=N||bid<=M)
{
//添加墙的地盘
if(wid<=N&&(bid>M||Bird_cmpy_g(wall[wid].a,bird[bid])))
{
ST.Insert(wall[wid].a.x,wall[wid].b.x,wid);
wid++;
}
//更新鸟的答案
else if(bid<=M)
{
int qid=ST.Query(bird[bid].x);
if(qid!=0)
{
long long d=max(0LL,mapy[bird[bid].y]-mapy[wall[qid].b.y]);
if(dif(dis[bird[bid].id]!=0x7F7F7F7F7F7F7F7FLL)
ans[hitid[bird[bid].id]]--;
ans[wall[qid].id]++;
dis[bird[bid].id]=d;
hitid[bird[bid].id]=wall[qid].id;
}
}
bid++;
}
}
//设置墙同一直线总是坐标大的在前,方便排序
for(int i=1;i<=N;i++)
{
if(wall[i].mode()&&wall[i].a.yif(!wall[i].mode()&&wall[i].a.x//初始化,按x从大到小排序
wid=bid=1;
ST.Init(3*N);
sort(wall+1,wall+N+1,Wall_cmpx_l);
sort(bird+1,bird+M+1,Bird_cmpx_l);
//扫描线,从右到左,从上到下,鸟向右撞
while(wid<=N||bid<=M)
{
//添加墙的地盘
if(wid<=N&&(bid>M||Bird_cmpx_l(wall[wid].a,bird[bid])))
{
ST.Insert(wall[wid].b.y,wall[wid].a.y,wid);
wid++;
}
//更新鸟的答案
else if(bid<=M)
{
int qid=ST.Query(bird[bid].y);
if(qid!=0)
{
long long d=max(0LL,mapx[wall[qid].b.x]-mapx[bird[bid].x]);
if(dif(dis[bird[bid].id]!=0x7F7F7F7F7F7F7F7FLL)
ans[hitid[bird[bid].id]]--;
ans[wall[qid].id]++;
dis[bird[bid].id]=d;
hitid[bird[bid].id]=wall[qid].id;
}
}
bid++;
}
}
//初始化,按y从大到小排序
wid=bid=1;
ST.Init(3*N);
sort(wall+1,wall+N+1,Wall_cmpy_l);
sort(bird+1,bird+M+1,Bird_cmpy_l);
//扫描线,从上到下,从右到左,鸟向下撞
while(wid<=N||bid<=M)
{
//添加墙的地盘
if(wid<=N&&(bid>M||Bird_cmpy_l(wall[wid].a,bird[bid])))
{
ST.Insert(wall[wid].b.x,wall[wid].a.x,wid);
wid++;
}
//更新鸟的答案
else if(bid<=M)
{
int qid=ST.Query(bird[bid].x);
if(qid!=0)
{
long long d=max(0LL,mapy[wall[qid].b.y]-mapy[bird[bid].y]);
if(dif(dis[bird[bid].id]!=0x7F7F7F7F7F7F7F7FLL)
ans[hitid[bird[bid].id]]--;
ans[wall[qid].id]++;
dis[bird[bid].id]=d;
hitid[bird[bid].id]=wall[qid].id;
}
}
bid++;
}
}
//输出
for(int i=1;i<=N;i++)
printf("%d\n",ans[i]);
return 0;
}