【论文笔记】Non-local Neural Networks
Paper:https://arxiv.org/abs/1711.07971v1
Author:Xiaolong Wang, Ross Girshick, Abhinav Gupta, Kaiming He (CMU, FAIR)
0.简述
convolution和recurrent都是对局部区域进行的操作,所以它们是典型的local operations。受计算机视觉中经典的非局部均值(non-local means)的启发,本文提出一种non-local operations用于捕获长距离依赖(long-range dependencies),即如何建立图像上两个有一定距离的像素之间的联系,如何建立视频里两帧的联系,如何建立一段话中不同词的联系等。
non-local operations在计算某个位置的响应时,是考虑所有位置features的加权——所有位置可以是空间的,时间的,时空的。这个结构可以被插入到很多计算机视觉结构中,在视频分类的任务上,non-local模型在Kinetics和Charades上都达到了最好的结果。在图像识别的任务上,non-local模型提高了COCO上物体检测/物体分割/姿态估计等任务的结果。
1. Non-local Neural Networks
1.1 定义
按照非局部均值的定义,我们定义在深度神经网络中的non-local操作如下:

其中x表示输入信号(图片,序列,视频等,也可能是它们的features),y表示输出信号,其size和x相同。 f(xi,xj) f ( x i , x j ) 用来计算i和所有可能关联的位置j之间pairwise的关系,这个关系可以是比如i和j的位置距离越远,f值越小,表示j位置对i影响越小。 g(xj) g ( x j ) 用于计算输入信号在j位置的特征值。C(x)是归一化参数。
从上式中可以看出任意位置上的j,可以是时间的、空间的、时空的任意位置,都可以影响到i的输出值。作为对比,conv的操作是对一个局部邻域内的特征值进行加权求和,比如kernel size=3时, i−1≤j≤i+1 i − 1 ≤ j ≤ i + 1 。 recurrent的操作则是i时刻的值仅基于当前时刻或前一时刻(j=i or i-1)。
另外作为对比,non-local的操作也和fc层不同。公式(1)计算的输出值受到输入值之间的关系的影响(因为要计算pairwise function),而fc则使用学习到的权重计算输入到输出的映射,在fc中 xj x j 和 xi x i 的关系是不会影响到输出的,这一定程度上损失了位置的相关性。另外,non-local能够接受任意size的输入,并且得到的输出保持和输入size一致。而fc层则只能有固定大小的输入输出。
non-local是一个很灵活的building block,它可以很容易地和conv、recurrent层一起使用,它可以被插入到dnn的浅层位置,不像fc通常要在网络的最后使用。这使得我们可以通过结合non-local以及local的信息构造出更丰富的结构。
1.2 表示形式
接下来我们会讨论f和g的几种形式。有意思的是我们的实验显示不同的表现形式其实对non-local的结果并没有太大影响,表明non-local这个行为才是主要的提升因素。
为了简化,我们只考虑g是线性的情况,即 g(xj)=Wgxj g ( x j ) = W g x j ,其中 Wg W g 是一个可学的权重矩阵,实际中是通过空间域的1*1 conv或时空域的1*1*1 conv实现的。
接下来我们讨论f的不同形式。
Gaussian。从非局部均值和双边滤波器来看,常见的f是高斯函数。在本文中,我们考虑f为如下形式:

其中 xTixj x i T x j 是点乘相似度(dot-product similarity)。也可以用欧式距离,但是点乘在深度学习平台上更好实现。此时归一化参数 C(x)=∑∀jf(xi,xj) C ( x ) = ∑ ∀ j f ( x i , x j ) 。
Embedded Gaussian。高斯函数的一个简单的变种就是在一个embedding space中去计算相似度,在本文中,我们考虑以下形式:

其中 θ(xi)=Wθxi θ ( x i ) = W θ x i 和 ϕ(xj)=Wϕxj ϕ ( x j ) = W ϕ x j 是两个embedding。归一化参数和之前一致,为 C(x)=∑∀jf(xi,xj) C ( x ) = ∑ ∀ j f ( x i , x j ) 。
我们发现self-attention模块其实就是non-local的embedded Gaussian版本的一种特殊情况。对于给定的i, 1C(x)f(xi,xj) 1 C ( x ) f ( x i , x j ) 就变成了计算所有j的softmax,即 y=softmax(xTWTθWϕx)g(x) y = s o f t m a x ( x T W θ T W ϕ x ) g ( x ) ,这就是[47]中self-attention的表达形式。这样我们就将self-attention模型和传统的非局部均值联系在了一起,并且将sequential self-attention network推广到了更具一般性的space/spacetime non-local network,可以在图像、视频识别任务中使用。
另外和[47]的结论不同,我们发现attention的形式对于我们研究的case来说并不是必须的。为了说明这一点,我们给出另外两种f的表达形式。
Dot product。 f也可以定义成点乘相似度,即:

这里我们使用embedded version。在这里,归一化参数设为C(x)=N,其中N是x的位置的数目,而不是f的和,这样可以简化梯度的计算。这种形式的归一化是有必要的,因为输入的size是变化的,所以用x的size作为归一化参数有一定道理。
dot product和embeded gaussian的版本的主要区别在于是否做softmax,softmax在这里的作用相当于是一个激活函数。
Concatenation。 Concat是在Relation Networks [38]中用到的pairwise function。我们也给出了一个concat形式的f,如下:

这里[.,.]表示的是concat, wf w f 是能够将concat的向量转换成一个标量的权重向量。这里设置C(x)=N。
以上我们定义了多种变种的pairwise function f,这说明了我们的non-local的灵活性,我们相信也会有别的变种能够提升性能。
1.3 Non-local Block
我们将(1)式中的non-local操作变形成一个non-local block,以便其可以被插入到已有的结构中。
我们定义一个non-local block为:

其中 yi y i 已经在(1)式中给出了, +xi + x i 则表示的是一个residual connection。residual connection的结构使得我们可以在任意的pretrain模型中插入一个新的non-local block而不需要改变其原有的结构(如 Wz=0 W z = 0 作为初始化则完全和原始结构一致)。
一个示例的non-local block如图所示,我们看到式(2),(3),(4)中的这些pairwise function可以通过矩阵乘法来进行,(5)则可以直接concat得到。

non-local block的pairwise的计算可以是非常lightweight的,如果它用在高层级,较小的feature map上的话。比如,图2上的典型值是T=4,H=W=14 or 7。通过矩阵运算来计算parwise function的值就和计算一个conv layer的计算量类似。另外我们还通过以下方式使其更高效。
Non-local Blocks的高效策略。我们设置 Wg W g , Wθ W θ , Wϕ W ϕ 的channel的数目为x的channel数目的一半,这样就形成了一个bottleneck,能够减少一半的计算量。 Wz W z 再重新放大到x的channel数目,保证输入输出维度一致。
还有一个subsampling的trick可以进一步使用,就是将(1)式变为: yi=1C(x̂)∑∀jf(xi,x̂j)g(x̂j) y i = 1 C ( x ^ ) ∑ ∀ j f ( x i , x ^ j ) g ( x ^ j ) ,其中 x̂ x ^ 是 x x 下采样得到的(比如通过pooling),我们将这个方式在空间域上使用,可以减小1/4的pairwise function的计算量。这个trick并不会改变non-local的行为,而是使计算更加稀疏了。这个可以通过在图2中的 ϕ ϕ 和 g g 后面增加一个max pooling层实现。
我们在本文中的所有non-local模块中都使用了上述的高效策略。
2. 视频分类模型
为了理解non-local networks的操作,我们在视频分类任务上进行了一系列的ablation experiments。
2D ConvNet baseline (C2D)。为了独立开non-local nets中时间维度的影响vs 3D ConvNets,我们构造了一个简单的2D baseline结构。
Table 1给出了ResNet-50 C2D backbone。输入的video clip是32帧,大小为224*224。Table 1中的所有卷积都是用的2D的kernel,即逐帧对输入视频进行计算。唯一和temporal有关的计算就是pooling,也就是说这个baseline模型简单地在时间维度上做了一个聚合的操作。
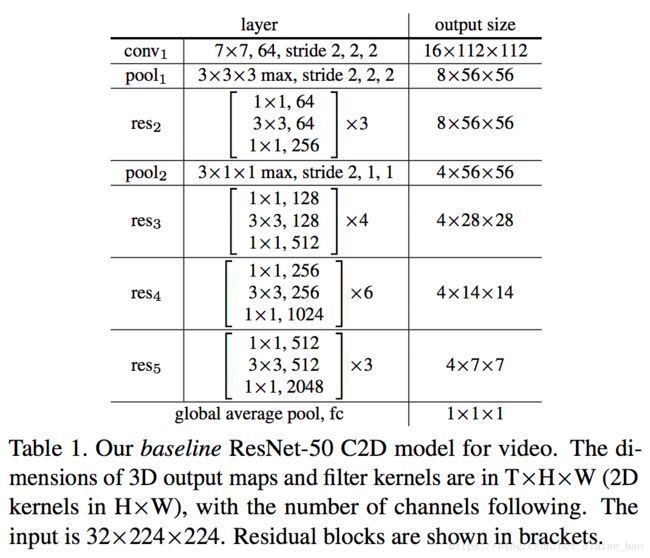
Inflated 3D ConvNet (I3D)。 Table 1中的C2D模型可以通过inflate的操作转换成一个3D卷积的结构。具体地,一个2D k*k大小的kernel可以inflate成3D t*k*k大小的kernel,只要将其权重重复t次,再缩小t倍即可。
我们讨论2种inflate的方式。一种是将residual block中的3*3的kernel inflate成3*3*3的,另一种是将residual block中的1*1的kernel inflate成3*1*1的。这两种形式我们分别用 I3D3∗3∗3 I 3 D 3 ∗ 3 ∗ 3 和 I3D3∗1∗1 I 3 D 3 ∗ 1 ∗ 1 表示。因为3D conv的计算量很大,我们只对每2个residual blocks中的1个kernel做inflate。对更多的kernel做inflate发现效果反而变差了。另外conv1层我们inflate成5*7*7。
Non-local network。 我们将non-local block插入到C2D或I3D中,就得到了non-local nets。我们研究了插入1,5,10个non-local blocks的情况,实现细节将在后面给出。
2.1 Non-local Network实现细节
Training。 我们的模型是在ImageNet上pretrain的,没有特殊说明的话我们使用32帧的输入。32帧是通过从原始长度的视频中随机选择1个位置取出64个连续帧,然后每隔1帧取1帧得到的最终的32帧。spatial size是224*224大小,是将原始视频rescale到短边为[256,320]区间的随机值,然后再random crop 224*224大小。我们在8卡GPU上进行训练,每卡上有8 clips(也就是说总的batchsize是64 clips)。我们一共迭代了400k iterations,初始lr为0.01,然后每150k iterations lr下降1/10。momentum设为0.9,weight decay设为0.0001。dropout在global pooling层后面使用,dropout ratio设为0.5。
我们finetune模型的时候 BN是打开的,这和常见的finetune ResNet的操作不同,它们通常是frozen BN。我们发现在我们的实验中enable BN有利于减少过拟合。
在最后一个1*1*1 conv层(表示 Wz W z )的后面我们加了一个BN层,其他位置我们没有增加BN。这个BN层的scale参数初始化为0,这是为了保证整个non-local block的初始状态相当于一个identity mapping,这样插入到任何预训练网络中在一开始都能保持其原来的表现。
Inference。 推理时,在我们将视频rescale到短边256进行推理。时域上我们从整个视频中平均采样10个clip,然后分别计算他们的softmax scores,最后做平均得到整个视频的score。
3. 实验
关于视频分类的实验,我们在Kinetics上进行全面的实验,另外也给出了Charades上的实验结果,显示出我们的模型的泛化性。这里只给出Kinetics上的结果,更多的请看原文。
Table 2给出了ablation results。
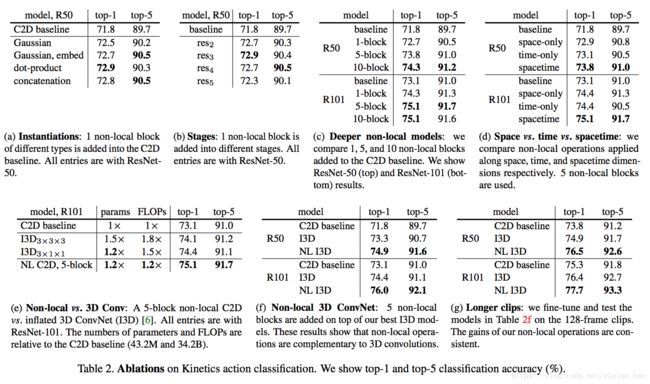
f的表现形式的影响。表2a比较了不同的non-local block的形式插入到C2D得到的结果(插入位置在res4的最后一个residual block之前)。发现即使只加一个non-local block都能得到~1%的提高。
有意思的是不同的non-local block的形式效果差不多,说明是non-local block的结构在起作用,而对具体的表达方式不敏感。本文后面都采用embedded Gaussian进行实验,因为这个版本有softmax,可以直接给出[0,1]之间的scores。
哪个阶段加入non-local blocks?表2b比较了一个non-local block加在resnet的不同stage的效果,具体加在不同stage的最后一个residual block之前。发现在res2,res3,res4层上加non-local block效果类似,加在res5上效果稍差。这个的可能原因是res5的spatial size比较小,只有7*7,可能无法提供精确的spatial信息了。
加入更多的non-local blocks。表2c给出了加入更多non-local block的结果,我们在resnet-50上加1 block(在res4),加5 block(3个在res4,2个在res3,每隔1个residual block加1个non-local block),加10 block(在res3和res4每个residual block都加non-local block)。在resnet101的相同位置加block。发现更多non-local block通常有更好的结果。我们认为这是因为更多的non-local block能够捕获长距离多次转接的依赖。信息可以在时空域上距离较远的位置上进行来回传递,这是通过local models无法实现的。
另外需要提到的是增加non-local block得到的性能提升并不只是因为它给base model增加了深度。为了说明这一点,表2c中resnet50 5blocks能够达到73.8的acc,而resnet101 baseline是73.1,同时resnet50 5block只有resnet101的约70%的参数量和80%的FLOPs。说明non-local block得到的性能提升并不只是因为它增加了深度。
时空域上做non-local。我们的方法也可以处理时空域的信息,这一特性非常好,在视频中相关的物体可能出现在较远的空间和较长的时间,它们的相关性也可以被我们的模型捕获。表2d给出了在时间维度,空间维度和时空维度分别做non-local的结果。仅在空间维度上做就相当于non-local的依赖仅在单帧图像内部发生,也就是说在式(1)上仅对index i的相同帧的index j做累加。仅在时间维度上做也类似。表2d显示只做时间维度或者只做空间维度的non-local,都比C2D baseline要好,但是没有同时做时空维度的效果好。
Non-local net vs. 3D ConvNet。表2e比较了我们的non-local C2D版本和inflated 3D ConvNets的性能。Non-local的操作和3D conv的操作可以看成是将C2D推广到时间维度的两种方式。
表2e也比较了param的数量,FLOPs等。我们的non-local C2D模型比I3D更加精确(75.1 vs 74.4),并且有更小的FLOPs(1.2x vs 1.5x)。说明单独使用时non-local比3D conv更高效。
Non-local 3D ConvNet. 不管上面的比较,其实non-local操作和3D conv各有各的优点:3D conv可以对局部依赖进行建模。表2f给出了在 I3D3∗1∗1 I 3 D 3 ∗ 1 ∗ 1 上插入5个non-local blocks的结果。发现NL I3D都能够在I3D的基础上提升1.6个点的acc,说明了non-local和3D conv是可以相互补充的。
更长的输入序列。 最后我们也实验了更长输入序列的情况下模型的泛化性。输入clip包含128帧连续帧,没有做下采样,是一般情况下取的32帧的4倍长度。为了将这个模型放入显存中,每个GPU上只能放下2 clips。因为这么小的batchsize的原因,我们freeze所有的BN层。我们从32帧训练得到的模型作为初始化模型,然后用128帧进行finetune,使用相同的iterations数目(虽然batchsize减小了),初始lr为0.0025,其他设置和之前保持一致。
表2g给出了128帧的实验结果,和表2f的32帧的结果相比,所有模型都表现得更好,说明我们的模型在长序列上的效果也很好。
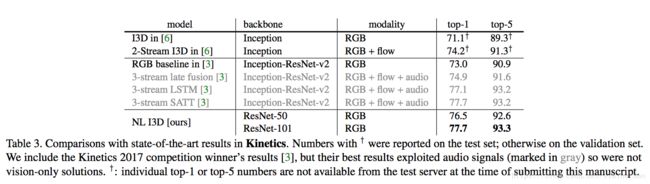
和state-of-the-art的比较。表3给出了Kinetics上各个方法的结果。
Done
最后想说,这篇文章除了整个故事非常完整以外,实验部分做的非常好,面面俱到地分析了各种情况,是以后写文章做实验可以学习的地方。