12、AD模数转换
一、A/D转换器的主要技术指标
1、分辨率
ADC的分辨率是指使输出数字量变化一个相邻数码所需输入模拟电压的变化量。常用二进制的位数表示。例如12位ADC的分辨率就是12位,或者说分辨率为满刻度的1/(2^12)。
一个10V满刻度的12位ADC能分辨输入电压变化最小值是10V×1/(2^12 )=2.4mV。
2、量化误差
ADC把模拟量变为数字量,用数字量近似表示模拟量,这个过程称为量化。量化误差是ADC的有限位数对模拟量进行量化而引起的误差。实际上,要准确表示模拟量,ADC的位数需很大甚至无穷大。一个分辨率有限的ADC的阶梯状转换特性曲线与具有无限分辨率的ADC转换特性曲线(直线)之间的最大偏差即是量化误差。
3、偏移误差
偏移误差是指输入信号为零时,输出信号不为零的值,所以有时又称为零值误差。假定ADC没有非线性误差,则其转换特性曲线各阶梯中点的连线必定是直线,这条直线与横轴相交点所对应的输入电压值就是偏移误差。
4、满刻度误差
满刻度误差又称为增益误差。ADC的满刻度误差是指满刻度输出数码所对应的实际输入电压与理想输入电压之差。
5、线性度
线性度有时又称为非线性度,它是指转换器实际的转换特性与理想直线的最大偏差。
6、绝对精度
在一个转换器中,任何数码所对应的实际模拟量输入与理论模拟输入之差的最大值,称为绝对精度。对于ADC而言,可以在每一个阶梯的水平中点进行测量,它包括了所有的误差。
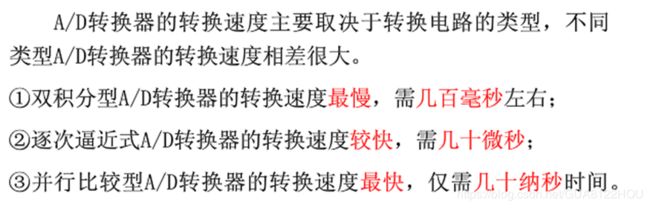
7、转换速率
ADC的转换速率是能够重复进行数据转换的速度,即每秒转换的次数。而完成一次A/D转换所需的时间(包括稳定时间),则是转换速率的倒数。
二、逐次逼近式ADC的转换原理
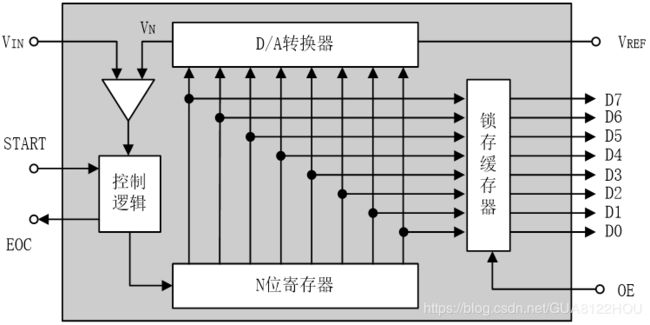
逐次逼近式AD转换器与计数式A/D转换类似,只是数字量由“逐次逼近寄存器SAR”产生。SAR使用“对分搜索法”产生数字量,以8位数字量为例,SAR首先产生8位数字量的一半,即10000000B,试探模拟量Vi的大小,若Vn>Vi,清除最高位,若Vn
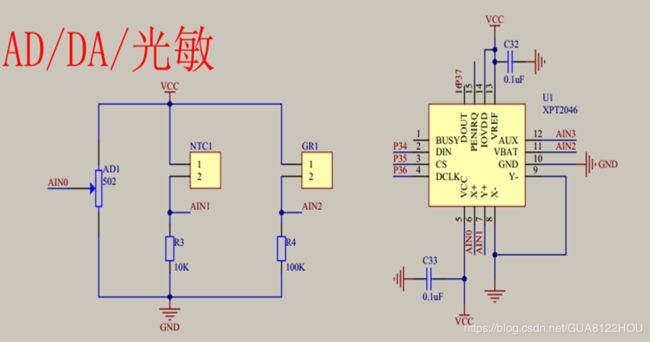

三、控制命令寄存器值的选择
如果要检测转换电位器模拟信号,控制字命令寄存器值为0X94或者0XB4.
如果要检测转换热敏电阻模拟信号,控制字命令寄存器值为0XD4.
如果要检测转换光敏电阻模拟信号,控制字命令寄存器值为0XA4.
如果要检测转换AIN3通道上模拟信号,控制字命令寄存器值为0XE4.
电位器AD的值(同样的光敏电阻,热敏电阻,外部输入的代码类似,只要修改命令寄存器的值)
主函数部分
/**************************************************************************************
* 电位器AD实验 *
实现现象:下载程序后数码管后4位显示电位器检测的AD值,范围是0-4095,一般达不到最大,这个受
你供电电压的影响.
注意事项:如果不想让点阵模块显示,可以将74HC595模块上的JP595短接片拔掉。
***************************************************************************************/
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
#include"XPT2046.h"
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
u8 disp[4];
u8 code smgduan[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
/*******************************************************************************
* 函 数 名 : delay
* 函数功能 : 延时函数,i=1时,大约延时10us
*******************************************************************************/
void delay(u16 i)
{
while(i--);
}
/*******************************************************************************
* 函数名 :datapros()
* 函数功能 :数据处理函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void datapros()
{
u16 temp;
static u8 i;
if(i==50)
{
i=0;
temp = Read_AD_Data(0x94); // AIN0 电位器
}
i++;
disp[0]=smgduan[temp/1000];//千位
disp[1]=smgduan[temp%1000/100];//百位
disp[2]=smgduan[temp%1000%100/10];//个位
disp[3]=smgduan[temp%1000%100%10];
}
/*******************************************************************************
* 函数名 :DigDisplay()
* 函数功能 :数码管显示函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void DigDisplay()
{
u8 i;
for(i=0;i<4;i++)
{
switch(i) //位选,选择点亮的数码管,
{
case(0):
LSA=0;LSB=0;LSC=0; break;//显示第0位
case(1):
LSA=1;LSB=0;LSC=0; break;//显示第1位
case(2):
LSA=0;LSB=1;LSC=0; break;//显示第2位
case(3):
LSA=1;LSB=1;LSC=0; break;//显示第3位
}
P0=disp[3-i];//发送数据
delay(100); //间隔一段时间扫描
P0=0x00;//消隐
}
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
while(1)
{
datapros(); //数据处理函数
DigDisplay();//数码管显示函数
}
}
数据处理函数部分
#include"XPT2046.h"
/****************************************************************************
*函数名:SPI_Write
*输 入:dat:写入数据
*输 出:无
*功 能:使用SPI写入数据
****************************************************************************/
void SPI_Write(uchar dat)
{
uchar i;
CLK = 0;
for(i=0; i<8; i++)
{
DIN = dat >> 7; //放置最高位
dat <<= 1;
CLK = 0; //上升沿放置数据
CLK = 1;
}
}
/****************************************************************************
*函数名:SPI_Read
*输 入:无
*输 出:dat:读取 到的数据
*功 能:使用SPI读取数据
****************************************************************************/
uint SPI_Read(void)
{
uint i, dat=0;
CLK = 0;
for(i=0; i<12; i++) //接收12位数据
{
dat <<= 1;
CLK = 1;
CLK = 0;
dat |= DOUT;
}
return dat;
}
/****************************************************************************
*函数名:Read_AD_Data
*输 入:cmd:读取的X或者Y
*输 出:endValue:最终信号处理后返回的值
*功 能:读取触摸数据
****************************************************************************/
uint Read_AD_Data(uchar cmd)
{
uchar i;
uint AD_Value;
CLK = 0;
CS = 0;
SPI_Write(cmd);
for(i=6; i>0; i--); //延时等待转换结果
CLK = 1; //发送一个时钟周期,清除BUSY
_nop_();
_nop_();
CLK = 0;
_nop_();
_nop_();
AD_Value=SPI_Read();
CS = 1;
return AD_Value;
}
头文件函数
#ifndef __XPT2046_H_
#define __XPT2046_H_
//---包含头文件---//
#include
#include
//---重定义关键词---//
#ifndef uchar
#define uchar unsigned char
#endif
#ifndef uint
#define uint unsigned int
#endif
#ifndef ulong
#define ulong unsigned long
#endif
//---定义使用的IO口---//
sbit DOUT = P3^7; //输出
sbit CLK = P3^6; //时钟
sbit DIN = P3^4; //输入
sbit CS = P3^5; //片选
uint Read_AD_Data(uchar cmd);
uint SPI_Read(void);
void SPI_Write(uchar dat);
#endif
三、控制命令寄存器值的选择
如果要检测转换电位器模拟信号,控制字命令寄存器值为0X94或者0XB4.
如果要检测转换热敏电阻模拟信号,控制字命令寄存器值为0XD4.
如果要检测转换光敏电阻模拟信号,控制字命令寄存器值为0XA4.
如果要检测转换AIN3通道上模拟信号,控制字命令寄存器值为0XE4.
电位器AD的值(同样的光敏电阻,热敏电阻,外部输入的代码类似,只要修改命令寄存器的值)
主函数部分
/**************************************************************************************
* 电位器AD实验 *
实现现象:下载程序后数码管后4位显示电位器检测的AD值,范围是0-4095,一般达不到最大,这个受
你供电电压的影响.
注意事项:如果不想让点阵模块显示,可以将74HC595模块上的JP595短接片拔掉。
***************************************************************************************/
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
#include"XPT2046.h"
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
u8 disp[4];
u8 code smgduan[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
/*******************************************************************************
* 函 数 名 : delay
* 函数功能 : 延时函数,i=1时,大约延时10us
*******************************************************************************/
void delay(u16 i)
{
while(i--);
}
/*******************************************************************************
* 函数名 :datapros()
* 函数功能 :数据处理函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void datapros()
{
u16 temp;
static u8 i;
if(i==50)
{
i=0;
temp = Read_AD_Data(0x94); // AIN0 电位器
}
i++;
disp[0]=smgduan[temp/1000];//千位
disp[1]=smgduan[temp%1000/100];//百位
disp[2]=smgduan[temp%1000%100/10];//个位
disp[3]=smgduan[temp%1000%100%10];
}
/*******************************************************************************
* 函数名 :DigDisplay()
* 函数功能 :数码管显示函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void DigDisplay()
{
u8 i;
for(i=0;i<4;i++)
{
switch(i) //位选,选择点亮的数码管,
{
case(0):
LSA=0;LSB=0;LSC=0; break;//显示第0位
case(1):
LSA=1;LSB=0;LSC=0; break;//显示第1位
case(2):
LSA=0;LSB=1;LSC=0; break;//显示第2位
case(3):
LSA=1;LSB=1;LSC=0; break;//显示第3位
}
P0=disp[3-i];//发送数据
delay(100); //间隔一段时间扫描
P0=0x00;//消隐
}
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
while(1)
{
datapros(); //数据处理函数
DigDisplay();//数码管显示函数
}
}
数据处理函数部分
#include"XPT2046.h"
/****************************************************************************
*函数名:SPI_Write
*输 入:dat:写入数据
*输 出:无
*功 能:使用SPI写入数据
****************************************************************************/
void SPI_Write(uchar dat)
{
uchar i;
CLK = 0;
for(i=0; i<8; i++)
{
DIN = dat >> 7; //放置最高位
dat <<= 1;
CLK = 0; //上升沿放置数据
CLK = 1;
}
}
/****************************************************************************
*函数名:SPI_Read
*输 入:无
*输 出:dat:读取 到的数据
*功 能:使用SPI读取数据
****************************************************************************/
uint SPI_Read(void)
{
uint i, dat=0;
CLK = 0;
for(i=0; i<12; i++) //接收12位数据
{
dat <<= 1;
CLK = 1;
CLK = 0;
dat |= DOUT;
}
return dat;
}
/****************************************************************************
*函数名:Read_AD_Data
*输 入:cmd:读取的X或者Y
*输 出:endValue:最终信号处理后返回的值
*功 能:读取触摸数据
****************************************************************************/
uint Read_AD_Data(uchar cmd)
{
uchar i;
uint AD_Value;
CLK = 0;
CS = 0;
SPI_Write(cmd);
for(i=6; i>0; i--); //延时等待转换结果
CLK = 1; //发送一个时钟周期,清除BUSY
_nop_();
_nop_();
CLK = 0;
_nop_();
_nop_();
AD_Value=SPI_Read();
CS = 1;
return AD_Value;
}
头文件函数
#ifndef __XPT2046_H_
#define __XPT2046_H_
//---包含头文件---//
#include
#include
//---重定义关键词---//
#ifndef uchar
#define uchar unsigned char
#endif
#ifndef uint
#define uint unsigned int
#endif
#ifndef ulong
#define ulong unsigned long
#endif
//---定义使用的IO口---//
sbit DOUT = P3^7; //输出
sbit CLK = P3^6; //时钟
sbit DIN = P3^4; //输入
sbit CS = P3^5; //片选
uint Read_AD_Data(uchar cmd);
uint SPI_Read(void);
void SPI_Write(uchar dat);
#endif