TI杯2019年全国电子设计大赛总结
文章目录
- 准备
- 选题
- 准备材料
- 原理设计及仿真
- 代码部分
- 摄像头模块
- Arduino模块
- 最后
准备
在比赛开始之前,我们团队对往年的国赛题目进行了分析比较,由于博主是计算机系(之前是电子信息)的小菜鸟,所以会尽量选择控制类题目。于是在此之前我们尝试做出一个往年的国赛题目,我们做的是‘平衡车跷跷板’,这里简单提一下:
所以在题目下来之前,我们还买了大量有关于控制类的元器件,比如说:各种传感器、小车底座等等(后来发现很多用不上,肉疼!)……
选题
2019年8月7日,题目出来
题目链接

我的内心是崩溃的~
很显然,对于计算机的我这个小菜鸟来说这很不友好啊——不对!B题的巡线机器人貌似还不错,而且还是控制类,满怀欣喜的打开发现……
纳尼?要我做飞控,emmmm……我一点经验都没有啊~
但是,此时有一个队友似乎很喜欢玩这个,然后,我们就抱着“搏一搏,单车变摩托”的良好心态毅然选择了B题,然后我们就开始各种找资料,最后发现貌似没有想象中那么难,然鹅,一个玩飞控的师兄过来实验室说“这个没有几年时间是啃不下来的……”
一阵讨论……
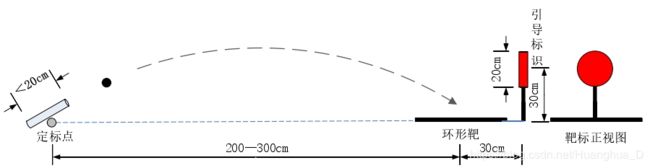
最后小组一致决定——换题!选H题:模拟电磁炮
准备材料
题目选好了,现在开始准备各种缺少的耗材(博主死死捂住钱包)
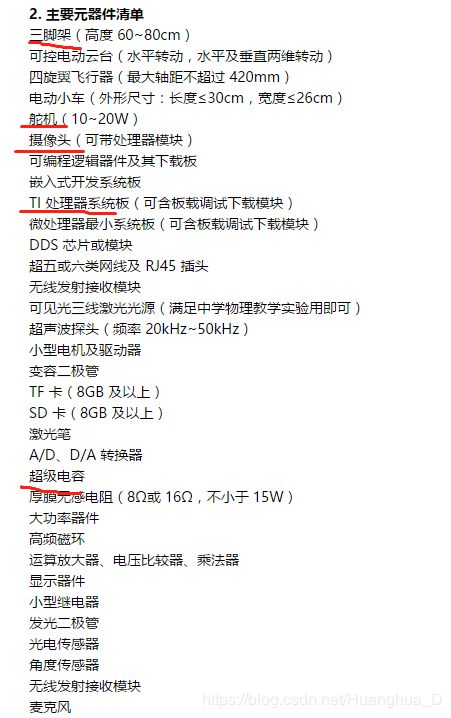
我们参考了B站和YouTube等大神的电磁炮作品后发现需要:炮管,漆包线,云台(舵机),摄像头,强磁铁(炮弹),等等……
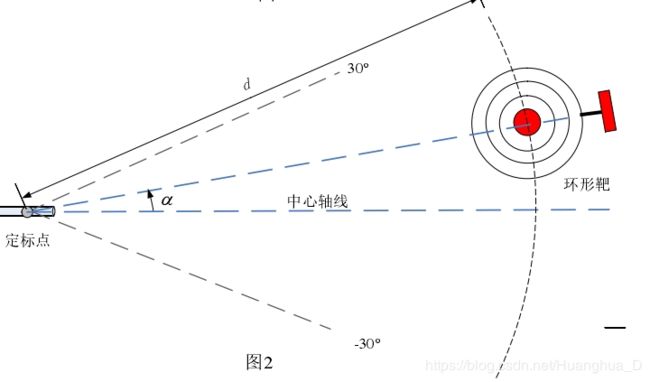
原理设计及仿真
终于,在高中学的斜抛运动公式,自由落体运动要在这里用上了,因为笔记本没带回来,所以这一块就先欠着哈~~
代码部分
以下代码都不是完整版,不可直接使用
摄像头模块
我们使用的摄像头是OpenMV,主要是它可以用python写机器视觉,其丰富的内置库以及优质的算法可以让你事半功倍!
OpenMV简介:

——上代码——
# By Cooper_David_H
# 导入内置库
import sensor, image, time
from pid import PID
from pyb import Servo, UART, LED
# 定义灯光,作用:显示摄像头工作状态,
# 这里是openmv封装好的写法,红灯-1,绿灯-2,蓝灯-3
red_led = LED(1)
green_led = LED(2)
blue_led = LED(3)
# 定义摄像头舵机
up_down = Servo(1)
L_R = Servo(2)
# 设置颜色识别的阈值,双阈值增强容错性,同时准确率率可能会降低
target_color = [(45, 66, 24, 73, 0, 56), (50, 12, 12, 93, -21, 98)]
# 设置PID,P,I值经过多次检验后得出
up_pid = PID(p=0.15, i=0.035 , imax=200)
LR_pid = PID(p=0.15, i=0.035 , imax=200)
# 定于测距常数K值
K=24700
# 重置传感器
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(10)
sensor.set_auto_whitebal(False)
clock = time.clock()
#让蓝灯亮起1秒
blue_led.on()
time.sleep(1000)
blue_led.off()
# 绿灯亮起:表示摄像头开始巡视四周环境
def look():
print("looking")
for i in range(-40,40):
L_R.angle(i)
green_led.on()
time.sleep(20)
green_led.off()
look()
#所有舵机复位
L_R.angle(0)
up_down.angle(0)
time.sleep(1000)
# 寻找最大色块
def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_b=blob
max_size = blob[2]*blob[3]
return max_b
# 敲黑板,重点来了~
while(True):
try:
clock.tick()
img = sensor.snapshot()
blobs = img.find_blobs(target_color)
# 当找到最大色块,用矩形框画出
if blobs:
max_b = find_max(blobs)
LR_error = max_b.cx()-img.width()/2
up_error = max_b.cy()-img.height()/2
img.draw_cross(max_b.cx(), max_b.cy())
# 将画面切分为四个区域
img.draw_line(img.width()//2,0,img.width()//2,img.height(), color = (0, 0, 255))
img.draw_line(0, img.height()//2, img.width(), img.height()//2, color = (0,0,255))
LR_output = LR_pid.get_pid(LR_error,1)/2
up_output = up_pid.get_pid(up_error,1)/2
L_R.angle(L_R.angle() - LR_output)
up_down.angle(up_down.angle() - up_output)
x = max_b.cx()
y = max_b.cy()
# 判断色块是否位于画面正中间,如果是红灯亮1秒
if (77 <= x <= 81):
red_led.on()
time.sleep(5)
red_led.off()
b = blobs[0]
Lm = (b[2]+b[3])/2
length = int(K/Lm)
print(length)
# 高速测距,并进入点火状态
while (3000 >= length >= 2800):
up_down.angle(35)
from fire import fire
break
while (2800 > length >= 2500):
up_down.angle(30)
from fire import fire
break
while (2500 > length >= 2000):
up_down.angle(25)
from fire import fire
break
# 当找到最大色块,但是色块不位于画面正中间,绿灯亮
else:
green_led.on()
time.sleep(5)
green_led.off()
except IOError:
print "Error: some wrongs happended! "
Arduino模块
用arduino进行手动发射炮弹,以及调节炮弹射程,输入角度和位置坐标自动定到那个角度然后发射打到那个位置
by the way :这里也是有删改的代码,需要用来学习参考的请留言
// By Cooper_Havid_H
#include
#include
#include "MPU6050.h"
//实例化舵机
Servo myservo1; //控制旋转角
Servo myservo2; //控制仰角
MPU6050 accelgyro;
int pin1 = 10; //舵机
int pin2 = 11; //舵机
int pin3 = 12; //充电
int pin4 = 13; //放电
const byte ROWS = 4; //four rows
const byte COLS = 3; //three columns
char keys[ROWS][COLS] = {
{'1', '2', '3'},
{'4', '5', '6'},
{'7', '8', '9'},
{'#', '0', '*'}
};
byte rowPins[ROWS] = {5, 4, 3, 2}; //connect to the row pinouts of the keypad
byte colPins[COLS] = {8, 7, 6}; //connect to the column pinouts of the keypad
Keypad keypad = Keypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS );
/*************************************************************************************/
unsigned long now, lastTime = 0;
float dt; //微分时间
int16_t ax, ay, az, gx, gy, gz; //加速度计陀螺仪原始数据
float aax = 0, aay = 0, aaz = 0, agx = 0, agy = 0, agz = 0; //角度变量
long axo = 0, ayo = 0, azo = 0; //加速度计偏移量
long gxo = 0, gyo = 0, gzo = 0; //陀螺仪偏移量
float pi = 3.1415926;
float AcceRatio = 16384.0; //加速度计比例系数
float GyroRatio = 131.0; //陀螺仪比例系数
uint8_t n_sample = 8; //加速度计滤波算法采样个数
float aaxs[8] = {0}, aays[8] = {0}, aazs[8] = {0}; //x,y轴采样队列
long aax_sum, aay_sum, aaz_sum; //x,y轴采样和
float a_x[10] = {0}, a_y[10] = {0}, a_z[10] = {0} , g_x[10] = {0} , g_y[10] = {0}, g_z[10] = {0}; //加速度计协方差计算队列
float Px = 1, Rx, Kx, Sx, Vx, Qx; //x轴卡尔曼变量
float Py = 1, Ry, Ky, Sy, Vy, Qy; //y轴卡尔曼变量
float Pz = 1, Rz, Kz, Sz, Vz, Qz; //z轴卡尔曼变量
/*********************************************************************************************************************************/
void setup() {
Serial.begin(9600);
myservo1.attach(10);
myservo2.attach(11);
//开机归中指令
myservo1.write(95);
myservo2.write(95);
pinMode(pin3, OUTPUT);
pinMode(pin4, OUTPUT);
/*************************/
accelgyro.initialize(); //初始化
unsigned short times = 200; //采样次数
for (int i = 0; i < times; i++)
{
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //读取六轴原始数值
axo += ax; ayo += ay; azo += az; //采样和
gxo += gx; gyo += gy; gzo += gz;
}
axo /= times; ayo /= times; azo /= times; //计算加速度计偏移
gxo /= times; gyo /= times; gzo /= times; //计算陀螺仪偏移
}
/***************************************************************************/
void loop() {
unsigned long now = millis(); //当前时间(ms)
dt = (now - lastTime) / 1000.0; //微分时间(s)
lastTime = now; //上一次采样时间(ms)
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //读取六轴原始数值
float accx = ax / AcceRatio; //x轴加速度
float accy = ay / AcceRatio; //y轴加速度
float accz = az / AcceRatio; //z轴加速度
aax = atan(accy / accz) * (-180) / pi; //y轴对于z轴的夹角
aay = atan(accx / accz) * 180 / pi; //x轴对于z轴的夹角
aaz = atan(accz / accy) * 180 / pi; //z轴对于y轴的夹角
aax_sum = 0; // 对于加速度计原始数据的滑动加权滤波算法
aay_sum = 0;
aaz_sum = 0;
for (int i = 1; i < n_sample; i++)
{
aaxs[i - 1] = aaxs[i];
aax_sum += aaxs[i] * i;
aays[i - 1] = aays[i];
aay_sum += aays[i] * i;
aazs[i - 1] = aazs[i];
aaz_sum += aazs[i] * i;
}
aaxs[n_sample - 1] = aax;
aax_sum += aax * n_sample;
aax = (aax_sum / (11 * n_sample / 2.0)) * 9 / 7.0; //角度调幅至0-90°
aays[n_sample - 1] = aay; //此处应用实验法取得合适的系数
aay_sum += aay * n_sample; //本例系数为9/7
aay = (aay_sum / (11 * n_sample / 2.0)) * 9 / 7.0;
aazs[n_sample - 1] = aaz;
aaz_sum += aaz * n_sample;
aaz = (aaz_sum / (11 * n_sample / 2.0)) * 9 / 7.0;
float gyrox = - (gx - gxo) / GyroRatio * dt; //x轴角速度
float gyroy = - (gy - gyo) / GyroRatio * dt; //y轴角速度
float gyroz = - (gz - gzo) / GyroRatio * dt; //z轴角速度
agx += gyrox; //x轴角速度积分
agy += gyroy; //x轴角速度积分
agz += gyroz;
/* kalman start */
Sx = 0; Rx = 0;
Sy = 0; Ry = 0;
Sz = 0; Rz = 0;
for (int i = 1; i < 10; i++)
{ //测量值平均值运算
a_x[i - 1] = a_x[i]; //即加速度平均值
Sx += a_x[i];
a_y[i - 1] = a_y[i];
Sy += a_y[i];
a_z[i - 1] = a_z[i];
Sz += a_z[i];
}
a_x[9] = aax;
Sx += aax;
Sx /= 10; //x轴加速度平均值
a_y[9] = aay;
Sy += aay;
Sy /= 10; //y轴加速度平均值
a_z[9] = aaz;
Sz += aaz;
Sz /= 10;
for (int i = 0; i < 10; i++)
{
Rx += sq(a_x[i] - Sx);
Ry += sq(a_y[i] - Sy);
Rz += sq(a_z[i] - Sz);
}
Rx = Rx / 9; //得到方差
Ry = Ry / 9;
Rz = Rz / 9;
Px = Px + 0.0025; // 0.0025在下面有说明...
Kx = Px / (Px + Rx); //计算卡尔曼增益
agx = agx + Kx * (aax - agx); //陀螺仪角度与加速度计速度叠加
Px = (1 - Kx) * Px; //更新p值
Py = Py + 0.0025;
Ky = Py / (Py + Ry);
agy = agy + Ky * (aay - agy);
Py = (1 - Ky) * Py;
Pz = Pz + 0.0025;
Kz = Pz / (Pz + Rz);
agz = agz + Kz * (aaz - agz);
Pz = (1 - Kz) * Pz;
Serial.println(agy);
delay(200);
/********************************************************/
if (key == '6') {
Serial.println(key);
//调整仰角32°
myservo2.write(122);
}
if (key == '7') {
Serial.println(key);
//控制左右旋转舵机1旋转0°
myservo1.write(95);
delay(100);
}
if (key == '8') {
Serial.println(key);
//控制左右旋转舵机1旋转25°
myservo1.write(120);
delay(100);
}
if (key == '9') {
Serial.println(key);
//控制舵机1旋转-25°
myservo1.write(70);
delay(100);
}
}//loop()的括号
最后
先放一张成品图吧!
谨以此文,纪念2019年8月不眠不休的四天三夜
感谢每一位队友的付出:
郑璇、俊贤
You are the best !