ORB特征
本文大部分内容来自ORB特征提取详解,在此基础上加上自己对原论文的理解。
ORB(Oriented FAST and Rotated BRIEF)是一种快速提取特征点和描述子的算法。其特征检测基于FAST,采用BRIEF描述子并加以改进。基于《ORB: an efficient alternative to SIFT or SURF》
1.尺度和旋转不变性的oFAST检测
1.1Fast经典方式提取角点(不具有旋转无关、尺度无关)
第一步,参考文章SIFT角点简介;
第二步:对提取出来的特征点进行Harris特征点检测,检测时设立低阈值,以获得多于N个的fast特征点。
并按照harris的代价函数排序得到最终需要的N个特征值。
1.2尺度无关性
设置一个比例因子scaleFactor(opencv默认为1.2)和金字塔的层数nlevels(pencv默认为8)。将原图像按比例因子缩小成nlevels幅图像。缩放后的图像为:I’= I/scaleFactork(k=1,2,…, nlevels)。nlevels幅不同比例的图像提取特征点总和作为这幅图像的oFAST特征点。
1.3旋转不变性
实现旋转无关性需要为每个特征带一个旋转方向信息。常用的有MAX和BIN的方法,以及ORB的灰度质心方法
BIN:
SIFT中的旋转性是检测特征点邻域内所有像素点的梯度,并构成一个梯度方向直方图(10个或8个柱的直方图),选择最大的柱所对应的梯度范围作为这个特征的主方向。此外还有
MAX
选择特征点邻域内值最大的梯度所对应的方向作为主方向。其效果要比BIN方法稍差。
灰度质心
ORB算法提出使用h灰度质心(intensity centroid) [2] [ 2 ] 来确定FAST特征点的方向。通过计算一个矩来计算特征点以r为半径范围内的质心,特征点坐标到质心形成一个向量作为该特征点的方向。
一个图像块(比如5x5的图像块中),对应的2x2的矩的元素表达为:
而该图像窗口的质心就是:
那么整个窗口的旋转为:

其中 θ∈(−\PI,\PI] θ ∈ ( − \PI , \PI ]
其中,I(x,y)为图像灰度表达式,x与y属于区间[-r,r],r为图像块半径,可知质心接近与零点
当p=q=0时,m00是该图像块的灰度和。当这幅图是二进制图像时,m00是该图的面积。
如果将图像的灰度值看做重量,那么质心就是幅图的质心;即整个灰度值的加权中心。
聚ORB论文 [1] [ 1 ] ,灰度质心方法要比BIN与MAX都好
2.rBRIEF描述子
rBRIEF特征描述是在BRIEF特征描述的基础上加入旋转因素。下边先介绍BRIEF,再介绍rBRIEF.
2.rBRIEF描述子
rBRIEF特征描述是在BRIEF特征描述的基础上加入旋转因素。下边先介绍BRIEF,再介绍rBRIEF.
2.1 BRIEF描述子生成原理
简单地说,BRIEF是在一个特征点的邻域选择n对像素点(p,q),比较其灰度值大小,如果I(p)>I(q),则令其对应的值为1,否则为0,这样对n对像素比较之后,就形成一个长度为n的二进制向量。一般一般n取128、256或512,opencv默认为256。
这n个点对如何选取呢?
为了增强抗噪性,一般会先对图像进行高斯平滑。ORB算子采用5x5的子窗口进行平滑.
在点周围选取点对I(p,q)的方法有以下5种:
1)在图像块内平均采样;
2)p和q都符合(0,S2/25)的高斯分布;
3)p符合(0,S2/25)的高斯分布,而q符合(0,S2/100)的高斯分布;
4)在空间量化极坐标下的离散位置随机采样;
5)把p固定为(0,0),q在周围平均采样。
BRIEF作者采用的是第二种。而ORB作者没有选择以上任意方式,而是使用统计学习的方法来重新选择点对集合
BRIEF实时性较好,其原文生成512个描述子用时8.18ms,匹配仅需2.19秒
BRIEF对于旋转过大时,比如超过30度时,匹配正确率迅速下降直到45度时为0。
因此需要对其进行改进:
2.2steered BRIEF(转向的BRIEF,即加入旋转不变性)
在使用oFast算法计算出的特征点中包括了特征点的方向角度。假设原始的BRIEF算法在特征点f的SxS(一般S取31)邻域内选取n对点集D, Di=(xi,yi) D i = ( x i , y i )
f对应的旋转是θ,因此对以上点经过旋转角度θ旋转(不过我猜想此处应该处理成-θ,因为θ在(-PI,PI]之间,那么应该将所有角度旋转到x轴正方向),得到新的点对:
在新的点集位置上比较点对的大小形成二进制串的描述符
需要注意的是需要对每一金字塔层的图像都进行如此的描述子计算;此外,ORB中角度θ取离散值,360度离散成30份,12度范围内对应一个离散值。
2.3rBRIEF改进BRIEF可区分性
2.3.1steered BRIEF可区分性问题
steered BRIEF加入了旋转不变性,但同时特征描述量的可区分行就下降了。可区分是指该描述量的独特性和不易重复程度,即两个完全不一样的特征不容易产生相似的描述量。
ORB论文中,作者用不同的方法对100k个特征点计算二进制描述符,对每个描述符的均值进行统计,如下表所示:
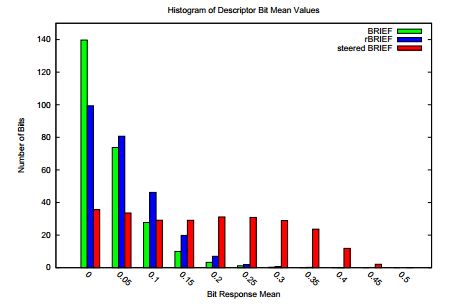
如果描述量中0,1的数量差别不大,那么该描述量均值大概为0.5,整个样本具有最大的方差0.25。其均值离0.5越远,表示描述量中含有更多的1,如steered BRIEF,意味着整个样本的方差越小;简单地讲,如果两个描述量大部分都是1,那么这两个描述量就更容易匹配成功。对于所有的描述量都存在这个趋势的话,描述量都更容易匹配,那么这些描述量的可区分行就降低了,同时也增大了描述符之间的相关性。
为了解决描述子的可区分性和相关性的问题,ORB论文中采用了一种学习好的二进制特征的思路。
原文用来证明steered BRIEF相关性大的方法两种方法:
1.PCA分解矩阵得到特征值并从大到小排序,其中BRIEF 和rBRIEF 的特征值在前十几个特征值后迅速下降,steered BRIEF的特征值却比较均匀;
2.局外点和局内点各自的描述子距离(两描述子的1-范式)两种方法。
2.3.2 rBRIEF(通过学习的方法来选则256维特征向量)
ORB没有使用BRIEF 5种选取点对方法中的任意一种,而是使用统计学习的方法来重新选择点对集合。
对于测试集中的每个点,从31x31的邻域内形成描述子
这里在对图像进行高斯平滑之后,使用邻域中的某个点的5x5邻域灰度平均值来代替某个点对的值。在31x31的邻域内,经过高斯平滑后,可采样的点共有(31-5+1)x(31-5+1)=729个,那么取点对的方法共有M=729*(729-1)/2 = 265356种,我们就要在这M种方法中选取256种取法,使得用这256维描述量生成的描述子代表整个样本时,每个描述子之间相关性最小。文中采用了一种降低相关系数的方法来选择:
1)先用最长的描述向量描述每个特征点,即对特征点周围区域内所有点(注意此处的点经过高斯平滑,其实只有729个)两两进行比较,共可形成M维度的特征向量。每个元素为1或0。
这个特征向量应该是最优区分能力的,可惜效率太低。因此考虑对它进行降维。
2)将所有300k个特征点进行上述提取,得到Q矩阵,Q的大小为:300k x M。每一列表示300k个特征值在某一维度上的描述。对Q矩阵的每一列求取平均值,按照平均值到0.5的距离大小重新对Q矩阵的列向量排序,形成矩阵T。
此时前边的表示总体而言该维度的可区分行最好。
但假如只是依次将第一列,第二列,第256列就作为特征描述量,可能会出现第一列,第二列实际上是非常相关的情况(比如只差一个系数)。因此需要使得选择的列不仅区分性好而且相互之间相对独立:
3)将T的第一列向量放到R中。
4)取T的下一列向量和R中的所有列向量计算相关性,如果相关系数小于设定的阈值,则将T中的该列向量移至R中。(此处计算相关性的原因)
5)按照4)的方式不断进行操作,直到R中的向量数量为256。
这种方法能降低每一列对所有可能选择的相关程度,相关程度越小,可区分性越大。
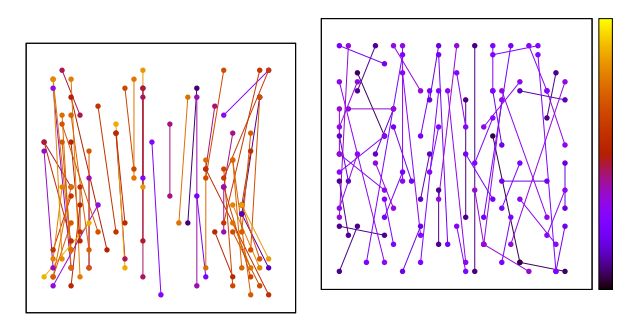
左图是未经学习的点对选取结果,右图是经过学习后选取的点对。
部分源码分析摘记
orb代码简单好读,但起初看到关于点对选取和学习的部分却不容易理解,特摘记如下:
///<该数组存储的是通过学习后选取的256个点对(512点)相对(特征点)的位置,bit_pattern_31_中每四个元素分别表示pair_l.x,pair_l.y,pair_r.x,pair_r.y;
///<共256个点对,产生256维描述子,256维度描述子长度共32个字节。
bit_pattern_31_[256*4] = {
8,-3, 9,5/*mean (0), correlation (0)*/,
......
}
//....
float angle = (float)kpt.angle*factorPI;
float a = (float)cos(angle), b = (float)sin(angle);
const uchar* center = &img.at(cvRound(kpt.pt.y), cvRound(kpt.pt.x));
const int step = (int)img.step;
#define GET_VALUE(idx) \ ///<取旋转后一个像素点的值
center[cvRound(pattern[idx].x*b + pattern[idx].y*a)*step + \
cvRound(pattern[idx].x*a - pattern[idx].y*b)]
// 循环32次,pattern取值16*32=512,也即每次取16个点,共形成8个点对,8个点对比较可以形成8bit(1 byte)长度的特征描述数据
for (int i = 0; i < 32; ++i, pattern += 16)
{
int t0, t1, val;
t0 = GET_VALUE(0); t1 = GET_VALUE(1);
val = t0 < t1;
t0 = GET_VALUE(2); t1 = GET_VALUE(3);
val |= (t0 < t1) << 1;
t0 = GET_VALUE(4); t1 = GET_VALUE(5);
val |= (t0 < t1) << 2;
t0 = GET_VALUE(6); t1 = GET_VALUE(7);
val |= (t0 < t1) << 3;
t0 = GET_VALUE(8); t1 = GET_VALUE(9);
val |= (t0 < t1) << 4;
t0 = GET_VALUE(10); t1 = GET_VALUE(11);
val |= (t0 < t1) << 5;
t0 = GET_VALUE(12); t1 = GET_VALUE(13);
val |= (t0 < t1) << 6;
t0 = GET_VALUE(14); t1 = GET_VALUE(15);
val |= (t0 < t1) << 7;
desc[i] = (uchar)val;//一共32*8维描述子
}
reference:
1.ORB特征提取详解
2.P. L. Rosin. Measuring corner properties. Computer Vision and Image Understanding, 73(2):291 – 307, 1999.
3.M. Calonder, V. Lepetit, C. Strecha, and P. Fua. Brief: Binary robust independent elementary features. In In European
Conference on Computer Vision, 2010. 1, 2, 3, 5
4.ORB: an efficient alternative to SIFT or SURF
5.ORB源码解析