PRML读书笔记(三)
回归的目标是在给定输入的情况下,预测具有连续性质的目标值。线性回归中的线性是相对于参数而言的。
3.1 线性基函数模型(Linear Basis Function Models)
最简单的线性回归模型是: y(x,w)=w0+w1x1+⋯+wDxD ,很明显这个模型不足以表达复杂的模型,但是我们能够从这个模型中得出线性回归模型的一般形式
其中 ϕj(x) 即基函数,该函数可以是任意的函数,一般为非线性函数(为了提高模型的表达能力); w0 为偏置,假设我们令 ϕ0(x)=1 ,那么上式就可以简化成
整个模型对于输入是非线性的,而对于参数是线性的,这样就在提高模型表达能力的同时,也简化了模型。但是这种简化也导致了明显的限制,后面会详细介绍。
第一章中的曲线拟合,我们令 ϕj(x)=xj ,多项式基函数是输入变量的全局函数,如果一个输入变量的区域改变会影响其他的输入区域,比如 (2,1,1,1)→(2,1,1,9) ,但是如果采用如高斯基函数等局部函数的话,就不会出现这种情况。
常见的几类基函数:
1. 多项基函数: ϕj(x)=xj
2. 高斯基函数: ϕj(x)=exp{−(x−μj)22s2}
3. sigmoid: ϕj(x)=σ(x−μjs),σ(a)=11+exp(−a)

3.1.1 最大似然和最小二乘法
假设目标值t由判别函数与一个额外的噪声给出: t=y(x,w)+ϵ , 其中噪声为一个均值为0、精度为 β 的高斯噪声。那么
假设我们令其损失函数为平方损失函数(square loss function),那么最优预测值就与条件均值一致
其中 p(t|x)=p(t|x,w,β) 。需要注意的是高斯噪声假设隐含t在给定x的条件分布是单峰的,这个性质可能对于某些应用不太合适。作为扩展,我们可以采用混合高斯分布。
X={x1,…,xN} ,其对应的值为 t={t1,…,tN} ,那么
为了使公式保持整齐,我们可以将上式写成
要使 p(t|w,β) 最大,那么
如果我们将偏置参数 w0 提出来,那么
由上面公式我们可以看出,偏置参数 w0 补偿平均目标值与基函数加权平均值的差异。
我们可以得到预测值与噪声的精度无关,但噪声的精度可以作为衡量预测值与目标值差异的一个标准。
3.1.2 最小二乘的几何形状
首先考虑坐标轴为 tn 的N维空间,那么 tn={t1,…,tN}T 就是这个空间里的一个向量。那么 φj={ϕj(x1),…,ϕj(xN)}T 也是N为空间里的向量。 y={y(x1,w),…,y(xN,w)}T
如果基函数的数量 M 小于训练数据集的数量 N ,那么我们可以找到一个M维的子空间 S 来表示 φj ,而 y 是 φj 向量的任意线性组合,所以 y 可以落在M维子空间 S 的任意位置上。 所以最小二乘法的解就变成了 t 在子空间 S 的投影。

3.1.3 顺序学习
最小二乘法的顺序学习可以采用随机梯度下降法
3.1.4 正则化的最小二乘法
在第一章中,我们介绍了一种正则化的方法来控制过拟合,即
上面的 EW 是比较常见的权值衰减,也可以采用其他的正则化方法。权值衰减的一个优点是保持整个损失函数仍然是权值的二项式。正则化方法会使权值收缩,从而减小噪声的影响。

对于上式我们可以将其看成约束条件为 ∑M−1j=1|wj|q≤η 的拉格朗日乘子,那么
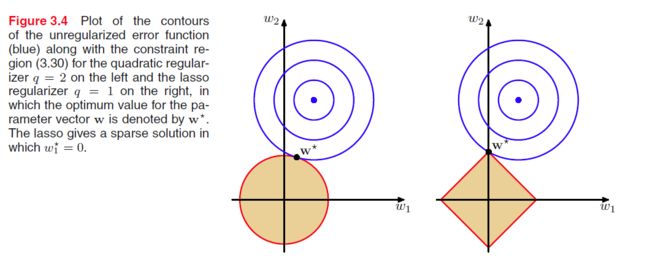
由于上图中的损失函数是 w1,w2 的二项式函数,所以为圆形。当 λ 增加时,会驱使更多的权值趋向0。
3.1.5 多个输出值
当有 K 个输出值时,那么权值 W 为MxK的矩阵。之后的分析是一致的。
3.2 Bias-Variance
我们知道如果训练数据集过小,而模型太复杂的话,会导致过拟合现象,但是如果为了减小过拟合现象而限制模型的灵活性,又可能会捕捉不到数据的重要性质。因此我们引入了正则化项,但是如何决定 λ 仍然是个难题。
第一章中我们得到了 E(L) 的表达式,
上式的 h(x) 是最佳预测,而 y(x) 是实际预测。其中第二项是固有的噪声,第一项跟我们选取的 y(x) 相关,当我们有充足的训练数据的时候 y(x)=h(x) ,但是往往训练数据集是有限的。
如果我们用 y(x,w) 来对 h(x) 建模,在贝叶斯方法中,这个模型的不确定性由 p(w|x) 决定;而对于频率方法来说,需要基于一个特定数据集 D 来对 w 进行估计。对于任意数据集 D ,我们能够得到 y(x;D) ,那么评测一个学习算法的性能时采用对所有数据集的集成平均。
假设我们有一个数据集 D ,则第一项的被积函数可以写成
实际预测值 y(x;D) 相对于 D 的平均值为 ED[y(x;D)] ,那么上式可以写成
h(x) 是最佳预测不依赖于 D 。偏置(bias)项表示平均值与最佳预测值的差异,方差(variance)表示了个体数据与平均值的震荡程度,即 y(x;D) 对于特殊的数据集敏感度。因此期望平方差可以写成
由于噪声是固有的,因此我们只能优化bias和variance,对于灵活(flexible)模型有较小的偏置极大方差,对于相对刚性(rigid)的模型具有较大的偏置和较小的方差。

这个图在方差方面不太直观,可以参考第一章图1.4.

尽管从频率观点上,bias-variace分解能够提供一些有趣(interesting)的见解,但是它是基于对集成数据集上的,而在实际中我们只有一个数据集。如果我们有一系列数据集,合并成一个数据集也可以减小过拟合现象。
3.3 贝叶斯线性回归
贝叶斯方法能够避免最大似然方法导致的过拟合现象,并且在只使用训练数据的情况下自动决定模型的复杂性。
3.3.1 参数分布
第二章中我们介绍了在贝叶斯方法中最重要的是共轭先验,在线性回归中我们知道似然函数为 p(t|w,β)=∏Nn=1N(t|wTϕ(xn),β−1) 是关于 w 二项式的指数函数,那么共轭先验是
上述后验概率的推导可以利用 completing the square方法得出。由于后验概率是高斯分布,因此它的模(mode)即均值(mean),所以 wMAP=mN 。如果 S0=α−1I ,当 α→0 时,先验概率就表示对整个空间上的参数没有偏向,那么 mN 就变成了 wML 。
考虑一个特殊共轭先验 p(w|α)=N(w|0,α−1I) ,那么
从 lnp 可以看到权值衰减的平方差损失函数符合贝叶斯思想。
3.3.2 预测分布
但是需要注意到是到目前为止,还是进行了点估计,上面的方法又叫做model selection,即选择后验概率最大的模型;下面我们介绍model averaging,即将多个模型加权平均从而得到预测分布。给定一个新的输入 x 预测它的值 t ,
上面的公式为了简化概念,省略了 t 相对应的输入值
σ2N(x) 的第二项表示相对于参数 w 的不确定性,当 N→∞ 时,第二项趋向于0。

从上图我们可以看出预测的不确定性依赖于 x ,当 x 在训练数据邻近时,不确定性大大降低,而且当训练数据增多时,整体不确定性降低。
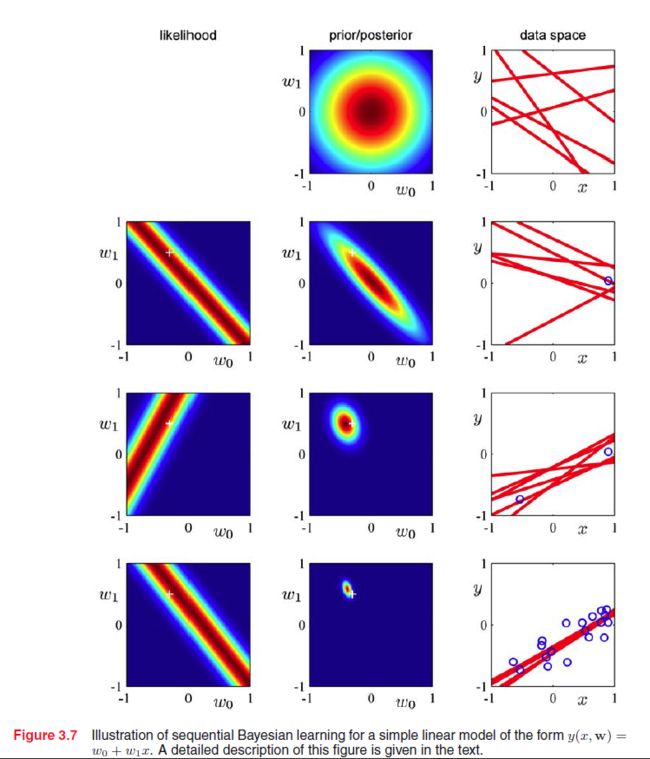
下图是从后验概率抽取参数,并且画出它们的曲线

3.3.3 等价核(Equivalent Kernel)
在model selection方法中,加入我们将均值代入到 y(x,w)=wTϕ(x) ,得到
进一步写成
上式 k 即equivalent kernel。我们可以将 k(x,xn) 看成 tn 相对应的权值。

weight local evidence more strongly than distant evidence。
由此我们知道在预测值附近的点高度相关,而对于两个距离比较远的点相关性比较小。
3.4 贝叶斯模型比较
最大似然方法导致的过拟合现象能够通过边缘化(累加或积分)模型的参数而不是对参数进行点估计来避免。假设我们想比较L个模型 {Mi},i=1,…,L 。模型表示对数据集 D 的概率分布。 p(Mi) 表示刚开始我们对这个分布的不确定性,即先验,那么给定一个数据集 D 后,
p(D|Mi) 是模型的证据(model evidence),即表示模型被当前数据集的偏向性(preference),又叫边缘似然(marginal likelihood)。贝叶斯因子: p(D|Mi)/p(D|Mj)
对于model averaging来说
很明显对于model averaging来说,计算量是一个比较大的限制,因此有时候我们可以用最大后验概率的模型来近似model averaging,这叫做model selection。模型由参数 w 控制,那么
Mi 相当于模型的超参数(hyper-parameter),比如线性回归中基函数与基函数的个数;而 w 则是这个模型学到的参数,很明显在相同的超参数下,参数 w 有多重可能性。
下面我们考虑在模型 Mi 情况下,并且只有一个参数 w ,后验概率 p(w|D)∝p(D|w)p(w) ,假设后验概率分布集中分布在 wMAP ,宽度为 Δwposterior ,假如我们进一步假设先验为 p(w)=1/Δwprior
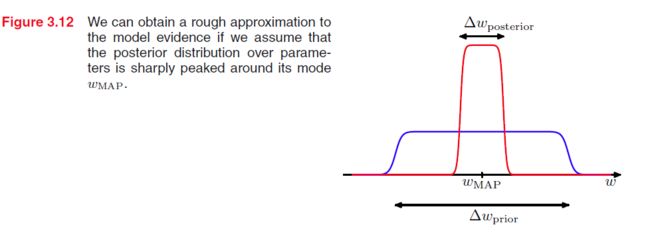
第一项表示模型在最大后验对数据的拟合程度;第二项是惩罚项,因为 Δwposterior<Δwprior ,所以这项是负值,并且当模型越复杂时, Δwposterior 就越小,从而使惩罚越重(对于相同的模型 Mi ,惩罚项相同?)。
假设有M个参数,并且所有的参数有相同的比率 Δwposterior/Δwprior ,那么
此时模型的复杂性由M控制,当M增加时,第一项增加,当模型越复杂,它能更好的拟合数据,从而 p(D|wMAP) 增加,故第一项增加;第二项减小,这是因为 ln(ΔwposteriorΔwprior) 为负,故M增加,第二项减小,从而最优解是这两项的平衡点(trade-off)。

由上图我们知道,采用的模型跟数据量的大小有关。
贝叶斯模型能够只用训练数据选择最佳模型(理论上?),假设我们有两个模型 M1,M2 ,而真实模型为 M1 ,那么
上式为相对熵,表示 M1,M2 的不相似性,明显理论上是可以单单采用训练数据就可以选择正确模型,但是在有多个模型的时候,计算量十分复杂。
3.5 The Evidence Approximation
Fully Bayesian中要求边缘化hyper-parameter,但是这往往是analytically intractable的,因此我们用逼近思想去分析,
如果后验分布 p(α,β|t) 集中分布在 α^,β^ 上,那么上式近似于
所以现在我们的目标最变成了如何确定 α^,β^ ,由于 p(α,β|t)∝p(t|α,β)p(α,β) ,如果我们对 p(α,β) 没有偏向,那么变成了 p(α,β|t)∝p(t|α,β) ,从而目标变成了求 p(t|α,β)
3.5.1 Evalution of Evidence Function
我们想得到高斯函数的指数形式即 E(w)=12(w−mN)TA(w−mN)+E(mN) ,第二项是与 w 无关的项,根据completing the square方法,我们得到
所以
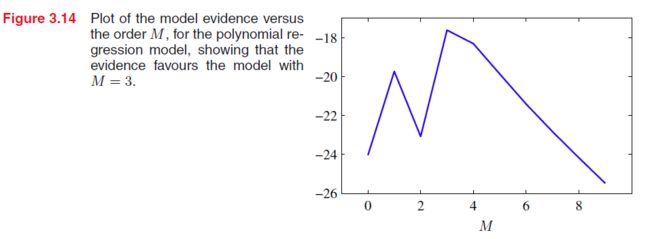
下图是第一章中曲线拟合的model evidence
3.5.2 Maximizing the evidence function
首先我们考虑 p(t|α,β) 相对于 α 的偏导,在这之前我们定义 (βΦTΦ)ui=λiui ,那么 A 的特征值即为 α+λi 。
需要注意的是 α=γmTNmN 并不是 α 的直接解,因为 γ,mN 都依赖于 α 。我们采用迭代过程来对 α 进行求解,首先任意初始化 α ,然后求 mN=βSNΦTt ,再求 γ ,递归求解 α
同理求 β 的偏导
明显也要用迭代过程来对 β 进行求解。而且我们知道 α,β 的值依赖于训练数据。
3.5.3 有效参数的数量

当 α→0 时,此时的模是似然函数的解,而 A=βΦTΦ ,也就是说 λi 是一个参数被数据决定的程度( λi measures how strongly one parameter is determined by the data)。那么 α 就是所有参数被先验决定的程度。 wMAPi=λiλi+αwMLi ,如果 λi≪α ,那么 wi→0 ,即数据对这个参数不敏感,由上面分析可以知道 γi=λiλi+α 能够估量有效参数的数量。
现在我们考虑 β ,在贝叶斯分析中 1βMAP=1N−γ∑Nn=1{tn−mTNϕ(xn)}2 ,而在最大似然估计中 1βML=1N∑Nn=1{tn−wTMLϕ(xn)}2 ,因为在贝叶斯分析中的参数有效数量取决于 γ ,因此要补偿最大似然估计从而使其无偏。
当 N≫M 时, r=M ,此时