用evo工具评估SLAM轨迹
evo github 地址:https://github.com/MichaelGrupp/evo
不同格式的轨迹文件及相互转换:https://github.com/MichaelGrupp/evo/wiki/Formats
问题汇总:https://github.com/MichaelGrupp/evo/issues?q=is%3Aissue+is%3Aclosed
1、安装 evo
sudo apt install python-pip
pip install evo --upgrade --no-binary evo出现问题:
Could not install packages due to an EnvironmentError: [Errno 13] Permission denied: '/usr/lib/python2.7/dist-packages/dateutil/relativedelta.pyc'
Consider using the `--user` option or check the permissions.解决:
pip install evo --upgrade --no-binary evo --user2、测试
cd ~/alan_dataset/EuRoC/mav0/state_groundtruth_estimate0
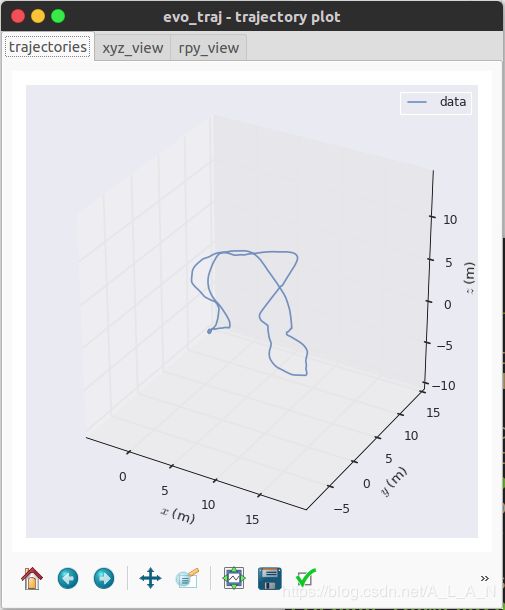
evo_traj euroc data.csv --plot出现问题:
name: data
infos: 19753 poses, 91.747m path length, 98.760s duration
/usr/lib/python2.7/dist-packages/matplotlib/font_manager.py:273: UserWarning: Matplotlib is building the font cache using fc-list. This may take a moment.
warnings.warn('Matplotlib is building the font cache using fc-list. This may take a moment.')
[ERROR] Unhandled error in evo.main_traj
Traceback (most recent call last):
File "/home/jinshan.lan/.local/lib/python2.7/site-packages/evo/entry_points.py", line 90, in launch
main_module.run(args)
File "/home/jinshan.lan/.local/lib/python2.7/site-packages/evo/main_traj.py", line 342, in run
from evo.tools.plot import PlotMode
File "/home/jinshan.lan/.local/lib/python2.7/site-packages/evo/tools/plot.py", line 36, in
import mpl_toolkits.mplot3d.art3d as art3d
File "/usr/lib/python2.7/dist-packages/mpl_toolkits/__init__.py", line 2, in
__import__('pkg_resources').declare_namespace(__name__)
File "/usr/lib/python2.7/dist-packages/pkg_resources/__init__.py", line 2927, in
@_call_aside
File "/usr/lib/python2.7/dist-packages/pkg_resources/__init__.py", line 2913, in _call_aside
f(*args, **kwargs)
File "/usr/lib/python2.7/dist-packages/pkg_resources/__init__.py", line 2940, in _initialize_master_working_set
working_set = WorkingSet._build_master()
File "/usr/lib/python2.7/dist-packages/pkg_resources/__init__.py", line 637, in _build_master
return cls._build_from_requirements(__requires__)
File "/usr/lib/python2.7/dist-packages/pkg_resources/__init__.py", line 650, in _build_from_requirements
dists = ws.resolve(reqs, Environment())
File "/usr/lib/python2.7/dist-packages/pkg_resources/__init__.py", line 834, in resolve
raise VersionConflict(dist, req).with_context(dependent_req)
ContextualVersionConflict: (numpy 1.11.0 (/usr/lib/python2.7/dist-packages), Requirement.parse('numpy>=1.12.0'), set(['pandas']))
[ERROR] evo module evo.main_traj crashed - no logfile written (disabled) 解决:
pip install numpy --upgrade --user运行结果:
3、将 EuRoC 数据集中 .csv 文件形式的 groundtruth 转换为 TUM 形式的轨迹文件
evo_traj euroc data.csv --save_as_tumTUM 形式的轨迹文件格式:
每行8个数,用空格分隔,包含时间戳(单位:秒)、位置和旋转(四元素表示)
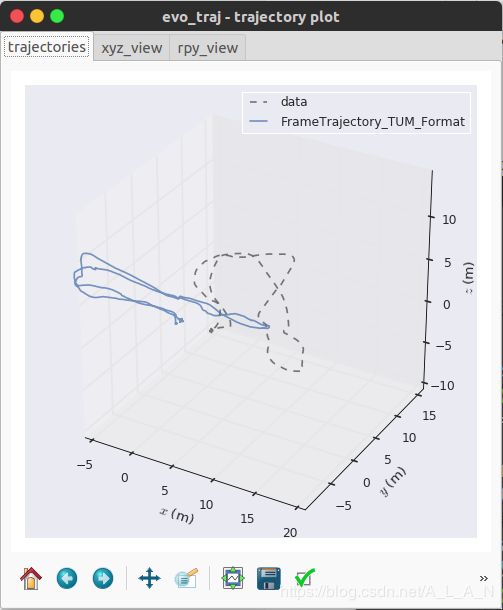
timestamp x y z q_x q_y q_z q_w4、多轨迹显示(轨迹未对齐)
(a)上面将 EuRoC 数据集中 MH_04_difficult 序列的 groundtruth(.csv文件) 转换为 TUM 形式的轨迹文件,文件名为 data.tum
(b)通过双目 ORBSLAM 跑 MH_04_difficult 数据集得到 TUM 形式的轨迹文件,文件名为 FrameTrajectory_TUM_Format.txt
见:ORB_SLAM2 & VI-ORBSLAM 相关(#alan#)
将两个 TUM 形式的轨迹文件放入同一个文件夹 (test_evo) 中
cd ~/Desktop/test_evo
evo_traj tum FrameTrajectory_TUM_Format.txt --ref=data.tum -p运行结果:
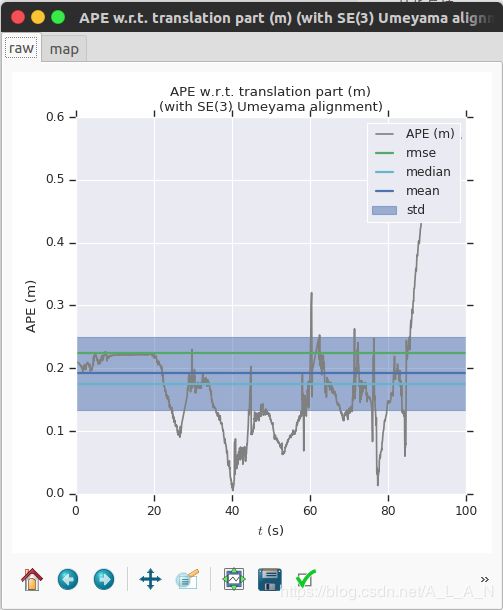
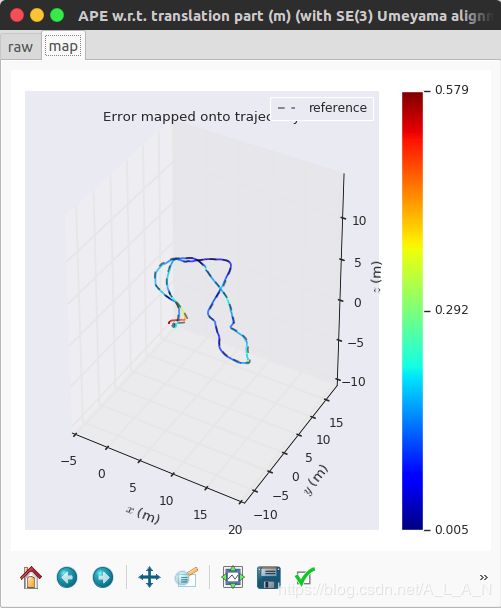
5、计算绝对位姿误差(轨迹对齐)
evo_ape tum data.tum FrameTrajectory_TUM_Format.txt -va --plot运行结果:

参考:
知乎:一种评估SLAM系统参数的实用工具
使用 evo 工具评测 VI ORB SLAM2 在 EuRoC 上的结果