专注网格剖分 - TetGen,NETGEN,Steller
提要
记得大三那一年有一门课叫做高等有限元,最后的作业就是网格剖分算法的实现,我和同学一起花了些时间做了一个Qt程序,他写算法,我写界面,最后成绩竟然出奇的拿了90多...
今天要介绍的这款软件TetGen就是一款网格剖分的软件,算是力学计算中的前处理,他能够将输入的三维模型剖分成一个个的单元,如下图:
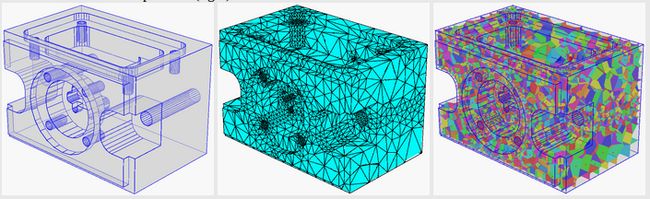
最左边的是原三维模型,中间图为Delaunay算法生成的四面体网格,最右边的图为在tetview中查看剖分的结果。
官网的手册里还有一些关于剖分算法的说明,有兴趣的可以去看看。
官网:http://tetgen.berlios.de/
Netgen也是一款网格剖分软件,为奥地利科学家Joachim Schoeberl负责编写的格网(曲面和实体)剖分程序。是格网划分技术中极为先进与完善的,在3D格网划分领域更是具有极大的优势。
官网:http://www.hpfem.jku.at/netgen/
Stellar的中文意思是恒星,这是一个博士写的用于优化网格的软件,可以将生成的单元模型进行一些smooth、删除重复边的操作。
环境: ubuntu 12.04 32bit
Delaunay算法简介及实现
【定义】三角剖分[1]:假设V是二维实数域上的有限点集,边e是由点集中的点作为端点构成的封闭线段, E为e的集合。那么该点集V的一个三角剖分T=(V,E)是一个平面图G,该平面图满足条件:
1.除了端点,平面图中的边不包含点集中的任何点。
2.没有相交边。
3.平面图中所有的面都是三角面,且所有三角面的合集是散点集V的凸包。
在实际中运用的最多的三角剖分是Delaunay三角剖分,它是一种特殊的三角剖分。
先从Delaunay边说起:
【定义】Delaunay边:假设E中的一条边e(两个端点为a,b),e若满足下列条件,则称之为Delaunay边:存在一个圆经过a,b两点,圆内(注意是圆内,圆上最多三点共圆)不含点集V中任何其他的点,这一特性又称空圆特性。
【定义】Delaunay三角剖分:如果点集V的一个三角剖分T只包含Delaunay边,那么该三角剖分称为Delaunay三角剖分。
算法描述
Bowyer-Watson算法
的基本步骤是:
1、构造一个超级三角形,包含所有散点,放入三角形链表。
2、将点集中的散点依次插入,在三角形链表中找出外接圆包含插入点的三角形(称为该点的影响三角形),删除影响三角形的公共边,将插入点同影响三角形的全部顶点连接起来,完成一个点在Delaunay三角形链表中的插入。
3、根据优化准则对局部新形成的三角形优化。将形成的三角形放入Delaunay三角形链表。
4、循环执行上述第2步,直到所有散点插入完毕。
算法实现
代码是当时的队友小六子的,注释比较详尽。
delaunay.h
- #ifndefDELAUNAY_H_INCLUDED
- #defineDELAUNAY_H_INCLUDED
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- usingnamespacestd;
- typedefstruct
- {
- doublex;
- doubley;
- doublez;
- }Point;//定义点类
- typedefvector
PointArray; //定义点类的vector容器 - typedefstruct
- {
- intleft;
- intright;
- intcount;//边的计数,如果计数为0,则删除此边
- }Edge;//定义边类
- typedefvector
EdgeArray; //定义边类的vector容器 - typedefstruct
- {
- intv[3];//三角形的三个顶点
- Edges[3];//三角形的三条边
- doublexc;//三角形外接圆圆心的x坐标
- doubleyc;//三角形外接圆圆心的y坐标
- doubler;//三角形外接圆的半径
- }Triangle;//定义三角形类
- typedefvector
TriangleArray; //定义三角形类的vector容器 - typedefvector<int>intArray;//定义int类的vector容器
- classDelaunay//定义Delaunay类
- {
- public:
- Delaunay(Pointp1,Pointp2,Pointp3,Pointp4);//Delaunay类的构造函数,创建外边框
- ~Delaunay();//Delaunay类的析构函数
- boolAddPoint(doublexx,doubleyy,doublezz);//向已有剖分图形中加点的函数
- voidDelete_Frame();//删除外边框
- voidBoundary_Recover(intfromPoint,inttoPoint);//边界恢复
- voidoutput();//输出ANSYS命令流文件
- private:
- voidCal_Centre(double&x_centre,double&y_centre,double&radius,intn1,intn2,intn3);//计算三角形的外接圆圆心坐标和半径
- voidMakeTriangle(intn1,intn2,intn3);//生成指定顶点的三角形
- boolinCircle(doublexx,doubleyy,TrianglecurrentTris);//判断点是否在圆内
- voidDelTriangle(intn,EdgeArray&BoundEdges);//删除指定的三角形
- PointArraym_Pts;//m_Pts用于存储所有点
- EdgeArraym_Edges;//m_Edges用于存储所有边
- TriangleArraym_Tris;//m_Tris用于存储所有三角形
- };
- voidGetPoint(double&xx,double&yy,double&zz,stringline);//解析从input文件中读取的每一行数据
- #endif//DELAUNAY_H_INCLUDED
#ifndef DELAUNAY_H_INCLUDED
#define DELAUNAY_H_INCLUDED
#include
#include
#include
#include
#include
#include
#include
using namespace std;
typedef struct
{
double x;
double y;
double z;
}Point;//定义点类
typedef vector PointArray;//定义点类的vector容器
typedef struct
{
int left;
int right;
int count;//边的计数,如果计数为0,则删除此边
}Edge;//定义边类
typedef vector EdgeArray;//定义边类的vector容器
typedef struct
{
int v[3];//三角形的三个顶点
Edge s[3];//三角形的三条边
double xc;//三角形外接圆圆心的x坐标
double yc;//三角形外接圆圆心的y坐标
double r;//三角形外接圆的半径
}Triangle;//定义三角形类
typedef vector TriangleArray;//定义三角形类的vector容器
typedef vector intArray;//定义int类的vector容器
class Delaunay//定义Delaunay类
{
public:
Delaunay(Point p1,Point p2,Point p3,Point p4);//Delaunay类的构造函数,创建外边框
~Delaunay();//Delaunay类的析构函数
bool AddPoint(double xx,double yy,double zz);//向已有剖分图形中加点的函数
void Delete_Frame();//删除外边框
void Boundary_Recover(int fromPoint,int toPoint);//边界恢复
void output();//输出ANSYS命令流文件
private:
void Cal_Centre(double &x_centre,double &y_centre,double &radius,int n1,int n2,int n3);//计算三角形的外接圆圆心坐标和半径
void MakeTriangle(int n1,int n2,int n3);//生成指定顶点的三角形
bool inCircle(double xx,double yy,Triangle currentTris);//判断点是否在圆内
void DelTriangle(int n,EdgeArray &BoundEdges);//删除指定的三角形
PointArray m_Pts;//m_Pts用于存储所有点
EdgeArray m_Edges;//m_Edges用于存储所有边
TriangleArray m_Tris;//m_Tris用于存储所有三角形
};
void GetPoint(double &xx,double &yy,double &zz,string line);//解析从input文件中读取的每一行数据
#endif // DELAUNAY_H_INCLUDED delaunary .cpp
- #include"delaunay.h"
- Delaunay::Delaunay(Pointp1,Pointp2,Pointp3,Pointp4)
- {
- m_Pts.resize(4);
- m_Pts[0]=p1;
- m_Pts[1]=p2;
- m_Pts[2]=p3;
- m_Pts[3]=p4;//添加四个外边框点
- m_Edges.resize(4);
- Edgel1={0,1,-1};
- Edgel2={1,2,-1};
- Edgel3={0,3,-1};
- Edgel4={2,3,-1};
- m_Edges[0]=l1;
- m_Edges[1]=l2;
- m_Edges[2]=l3;
- m_Edges[3]=l4;//添加四个外边框的边
- MakeTriangle(0,1,2);
- MakeTriangle(0,2,3);//添加初始的两个三角形
- }
- Delaunay::~Delaunay()//清空Delaunay类的数据成员
- {
- m_Pts.resize(0);
- m_Edges.resize(0);
- m_Tris.resize(0);
- }
- voidDelaunay::MakeTriangle(intn1,intn2,intn3)
- {
- doublex_centre,y_centre,radius;
- Cal_Centre(x_centre,y_centre,radius,n1,n2,n3);//获得顶点为n1,n2,n3的三角形的外接圆圆心坐标和半径
- TrianglenewTriangle={{n1,n2,n3},{{n1,n2,1},{n2,n3,1},{n1,n3,1}},x_centre,y_centre,radius};//生成指定的三角形
- m_Tris.push_back(newTriangle);//向m_Tris中添加新构造的三角形
- intEdgeSzie=(int)m_Edges.size();//获得目前的边数
- intflag;
- for(inti=0;i<3;i++)
- {
- flag=1;
- for(intj=0;j
- {
- if(newTriangle.s[i].left==m_Edges[j].left&&newTriangle.s[i].right==m_Edges[j].right&&m_Edges[j].count!=-1){flag=0;m_Edges[j].count+=1;break;}
- elseif(newTriangle.s[i].left==m_Edges[j].left&&newTriangle.s[i].right==m_Edges[j].right&&m_Edges[j].count==-1){flag=0;break;}
- }
- if(flag==1)m_Edges.push_back(newTriangle.s[i]);
- }
- }
- voidDelaunay::Cal_Centre(double&x_centre,double&y_centre,double&radius,intn1,intn2,intn3)
- {
- doublex1,x2,x3,y1,y2,y3;
- x1=m_Pts[n1].x;
- y1=m_Pts[n1].y;
- x2=m_Pts[n2].x;
- y2=m_Pts[n2].y;
- x3=m_Pts[n3].x;
- y3=m_Pts[n3].y;
- x_centre=((y2-y1)*(y3*y3-y1*y1+x3*x3-x1*x1)-(y3-y1)*(y2*y2-y1*y1+x2*x2-x1*x1))/(2*(x3-x1)*(y2-y1)-2*((x2-x1)*(y3-y1)));//计算外接圆圆心的x坐标
- y_centre=((x2-x1)*(x3*x3-x1*x1+y3*y3-y1*y1)-(x3-x1)*(x2*x2-x1*x1+y2*y2-y1*y1))/(2*(y3-y1)*(x2-x1)-2*((y2-y1)*(x3-x1)));//计算外接圆圆心的y坐标
- radius=sqrt((x1-x_centre)*(x1-x_centre)+(y1-y_centre)*(y1-y_centre));//计算外接圆的半径
- }
- boolDelaunay::AddPoint(doublexx,doubleyy,doublezz)
- {
- EdgeArrayBoundEdges;//BoundEdges用于存储在删除三角形后留下的边框,用于构造新的三角形
- PointnewPoint={xx,yy,zz};
- m_Pts.push_back(newPoint);//向m_Pts中添加新点
- intArraybadTriangle;//badTriangle用于存储不符合空圆规则的三角形的索引号
- intTriSize=(int)m_Tris.size();//获得目前的三角形数
- for(inti=0;i
- {
- if(inCircle(xx,yy,m_Tris[i])==true)badTriangle.push_back(i);
- }
- for(inti=0;i<(int)badTriangle.size();i++)//通过循环删除所有不符合空圆规则的三角形,同时保留边框
- {
- DelTriangle(badTriangle[i],BoundEdges);
- for(intj=i+1;j<(int)badTriangle.size();j++)badTriangle[j]-=1;
- }
- intPtSize=(int)m_Pts.size();//获得目前的点数
- for(inti=0;i<(int)BoundEdges.size();i++)//生成新的三角形
- {
- if(PtSize-1
- elseif(PtSize-1>BoundEdges[i].left&&PtSize-1
- elseMakeTriangle(BoundEdges[i].left,BoundEdges[i].right,PtSize-1);
- }
- returntrue;
- }
- boolDelaunay::inCircle(doublexx,doubleyy,TrianglecurrentTris)//判断点是否在三角形的外接圆内
- {
- doubledis=sqrt((currentTris.xc-xx)*(currentTris.xc-xx)+(currentTris.yc-yy)*(currentTris.yc-yy));
- if(dis>currentTris.r)returnfalse;
- elsereturntrue;
- }
- voidDelaunay::DelTriangle(intn,EdgeArray&BoundEdges)
- {
- for(inti=0;i<3;i++)
- {
- for(intj=0;j<(int)m_Edges.size();j++)
- {
- if(m_Edges[j].left==m_Tris[n].s[i].left&&m_Edges[j].right==m_Tris[n].s[i].right)
- {
- if(m_Edges[j].count==2)//若要删除三角形的一边的计数为2,则将其计数减1,并将其压入BoundEdges容器中
- {
- m_Edges[j].count=1;
- BoundEdges.push_back(m_Edges[j]);
- }
- elseif(m_Edges[j].count==-1)BoundEdges.push_back(m_Edges[j]);//如果是外边框,则直接压入BoundEdges容器中
- elseif(m_Edges[j].count==1)//如果删除三角形的一边的计数为1,则删除该边,同时查看BoundEdges中是否有此边,若有,则删除
- {
- for(intk=0;k<(int)BoundEdges.size();k++)
- {
- if(BoundEdges[k].left==m_Edges[j].left&&BoundEdges[k].right==m_Edges[j].right)
- {
- BoundEdges.erase(BoundEdges.begin()+k);
- break;
- }
- }
- m_Edges.erase(m_Edges.begin()+j);
- j--;
- }
- break;
- }
- }
- }
- m_Tris.erase(m_Tris.begin()+n);//删除该三角形
- }
- voidDelaunay::output()//向“output.log"文件中写入ANSYS命令流
- {
- ofstreamoutfile("output.log");
- if(!outfile)
- {
- cout<<"Unabletooutputnodes!";
- exit(1);
- }
- outfile<<"/PREP7"<
- for(inti=0;i<(int)m_Pts.size();i++)
- {
- outfile<<"K,"<
- }
- for(inti=0;i<(int)m_Edges.size();i++)
- {
- outfile<<"L,"<
- }
- outfile.close();
- }
- voidGetPoint(double&xx,double&yy,double&zz,stringline)//从字符串line中解析出点的x,y,z坐标
- {
- intflag=0;
- stringtmp="";
- char*cstr;
- for(inti=(int)line.find(',')+1;i<(int)line.size();i++)
- {
- if(line[i]==',')
- {
- cstr=newchar[tmp.size()+1];
- strcpy(cstr,tmp.c_str());
- if(flag==0){xx=atof(cstr);tmp.resize(0);flag++;}
- elseif(flag==1){yy=atof(cstr);tmp.resize(0);flag++;}
- continue;
- }
- tmp=tmp+line[i];
- }
- if(fabs(xx)<1.0e-6)xx=0.0;
- if(fabs(yy)<1.0e-6)yy=0.0;
- if(fabs(zz)<1.0e-6)zz=0.0;
- }
- voidDelaunay::Delete_Frame()//删除外边框
- {
- EdgeArrayBoundEdges;
- for(inti=0;i<4;i++)m_Pts.erase(m_Pts.begin());
- for(inti=0;i<(int)m_Tris.size();i++)
- {
- if(m_Tris[i].v[0]==0||m_Tris[i].v[0]==1||m_Tris[i].v[0]==2||m_Tris[i].v[0]==3)
- {
- DelTriangle(i,BoundEdges);
- BoundEdges.resize(0);
- i--;
- }
- else
- {
- for(intj=0;j<3;j++)
- {
- m_Tris[i].v[j]-=4;
- m_Tris[i].s[j].left-=4;
- m_Tris[i].s[j].right-=4;
- }
- }
- }
- for(inti=0;i<4;i++)m_Edges.erase(m_Edges.begin());
- for(inti=0;i<(int)m_Edges.size();i++)
- {
- m_Edges[i].left-=4;
- m_Edges[i].right-=4;
- }
- }
- voidDelaunay::Boundary_Recover(intfromPoint,inttoPoint)//恢复由指定点组成的边界
- {
- EdgeArrayBoundEdges;
- for(inti=0;i<(int)m_Tris.size();i++)
- {
- if(m_Tris[i].v[0]>=(fromPoint-1)&&m_Tris[i].v[2]<=(toPoint-1))
- {
- DelTriangle(i,BoundEdges);
- BoundEdges.resize(0);
- i--;
- }
- }
- }
#include "delaunay.h"
Delaunay::Delaunay(Point p1,Point p2,Point p3,Point p4)
{
m_Pts.resize(4);
m_Pts[0]=p1;
m_Pts[1]=p2;
m_Pts[2]=p3;
m_Pts[3]=p4;//添加四个外边框点
m_Edges.resize(4);
Edge l1={0,1,-1};
Edge l2={1,2,-1};
Edge l3={0,3,-1};
Edge l4={2,3,-1};
m_Edges[0]=l1;
m_Edges[1]=l2;
m_Edges[2]=l3;
m_Edges[3]=l4;//添加四个外边框的边
MakeTriangle(0,1,2);
MakeTriangle(0,2,3);//添加初始的两个三角形
}
Delaunay::~Delaunay()//清空Delaunay类的数据成员
{
m_Pts.resize(0);
m_Edges.resize(0);
m_Tris.resize(0);
}
void Delaunay::MakeTriangle(int n1,int n2,int n3)
{
double x_centre,y_centre,radius;
Cal_Centre(x_centre,y_centre,radius,n1,n2,n3);//获得顶点为n1,n2,n3的三角形的外接圆圆心坐标和半径
Triangle newTriangle={{n1,n2,n3},{{n1,n2,1},{n2,n3,1},{n1,n3,1}},x_centre,y_centre,radius};//生成指定的三角形
m_Tris.push_back(newTriangle);//向m_Tris中添加新构造的三角形
int EdgeSzie=(int)m_Edges.size();//获得目前的边数
int flag;
for (int i=0;i<3;i++)
{
flag=1;
for(int j=0;jBoundEdges[i].left && PtSize-1currentTris.r) return false;
else return true;
}
void Delaunay::DelTriangle(int n,EdgeArray &BoundEdges)
{
for (int i=0;i<3;i++)
{
for (int j=0;j<(int)m_Edges.size();j++)
{
if (m_Edges[j].left==m_Tris[n].s[i].left&&m_Edges[j].right==m_Tris[n].s[i].right)
{
if (m_Edges[j].count==2)//若要删除三角形的一边的计数为2,则将其计数减1,并将其压入BoundEdges容器中
{
m_Edges[j].count=1;
BoundEdges.push_back(m_Edges[j]);
}
else if (m_Edges[j].count==-1) BoundEdges.push_back(m_Edges[j]);//如果是外边框,则直接压入BoundEdges容器中
else if (m_Edges[j].count==1)//如果删除三角形的一边的计数为1,则删除该边,同时查看BoundEdges中是否有此边,若有,则删除
{
for (int k=0;k<(int)BoundEdges.size();k++)
{
if (BoundEdges[k].left==m_Edges[j].left&&BoundEdges[k].right==m_Edges[j].right)
{
BoundEdges.erase(BoundEdges.begin()+k);
break;
}
}
m_Edges.erase(m_Edges.begin()+j);
j--;
}
break;
}
}
}
m_Tris.erase(m_Tris.begin()+n);//删除该三角形
}
void Delaunay::output()//向“output.log"文件中写入ANSYS命令流
{
ofstream outfile("output.log");
if (!outfile)
{
cout<<"Unable to output nodes!";
exit(1);
}
outfile<<"/PREP7"<=(fromPoint-1)&&m_Tris[i].v[2]<=(toPoint-1))
{
DelTriangle(i,BoundEdges);
BoundEdges.resize(0);
i--;
}
}
} main.cpp
- #include"delaunay.h"
- intmain()
- {
- ifstreaminfile("input.txt");//打开"input.txt"文件
- if(!infile)//判断文件是否正常打开
- {
- cout<<"Unabletoinputnodes!";
- exit(1);
- }
- stringline;
- PointArrayp;
- doublexx,yy,zz;
- intnodeSize;
- for(inti=0;i<4;i++)//读入4外边框点
- {
- getline(infile,line);
- GetPoint(xx,yy,zz,line);
- Pointtmp={xx,yy,zz};
- p.push_back(tmp);
- }
- DelaunayMyMesh(p[0],p[1],p[2],p[3]);//实例化Delaunay类
- getline(infile,line);//读入节点数,用于后面循环
- char*cstr;
- cstr=newchar[line.size()+1];
- strcpy(cstr,line.c_str());
- nodeSize=atoi(cstr);
- for(inti=0;i
- {
- getline(infile,line);
- GetPoint(xx,yy,zz,line);
- MyMesh.AddPoint(xx,yy,zz);
- }
- infile.close();
- MyMesh.Delete_Frame();//删除外边框
- MyMesh.Boundary_Recover(203,466);
- MyMesh.Boundary_Recover(467,487);
- MyMesh.Boundary_Recover(488,511);
- MyMesh.Boundary_Recover(512,537);//以上都是恢复指定边界
- MyMesh.output();//将相应ANSYS命令流输出
- return0;
- }
#include "delaunay.h"
int main()
{
ifstream infile("input.txt");//打开"input.txt"文件
if (!infile)//判断文件是否正常打开
{
cout<<"Unable to input nodes!";
exit(1);
}
string line;
PointArray p;
double xx,yy,zz;
int nodeSize;
for (int i=0;i<4;i++)//读入4外边框点
{
getline(infile,line);
GetPoint(xx,yy,zz,line);
Point tmp={xx,yy,zz};
p.push_back(tmp);
}
Delaunay MyMesh(p[0],p[1],p[2],p[3]);//实例化Delaunay类
getline(infile,line);//读入节点数,用于后面循环
char *cstr;
cstr=new char[line.size()+1];
strcpy(cstr,line.c_str());
nodeSize=atoi(cstr);
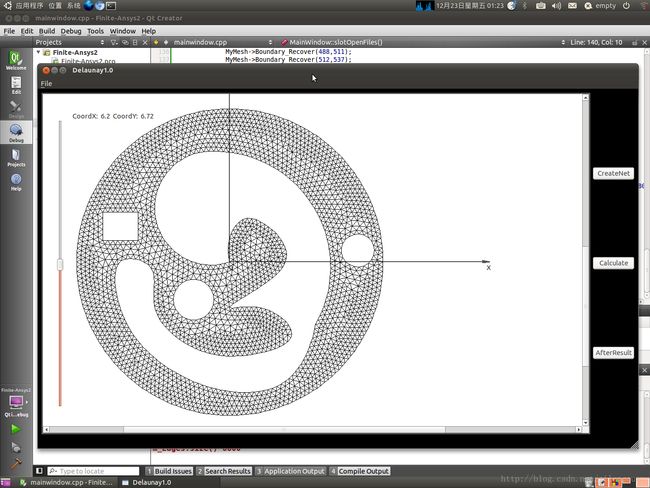
for (int i=0;i测试一组数据后,得到结果:
编译tetgen
下载源码之后cd进目录,然后执行
make
编译完成之后,目录下就会生成一个名为 tetgen 的可执行文件。
运行tetview
这个是用于查看网格模型的工具。 因为这个东西比较老,所以首先要安装一些比较老的库。
g77
下载好之后解压,cd进目录运行:
sudo ./install.sh
stdc++5
sudo apt-get install libstdc++5
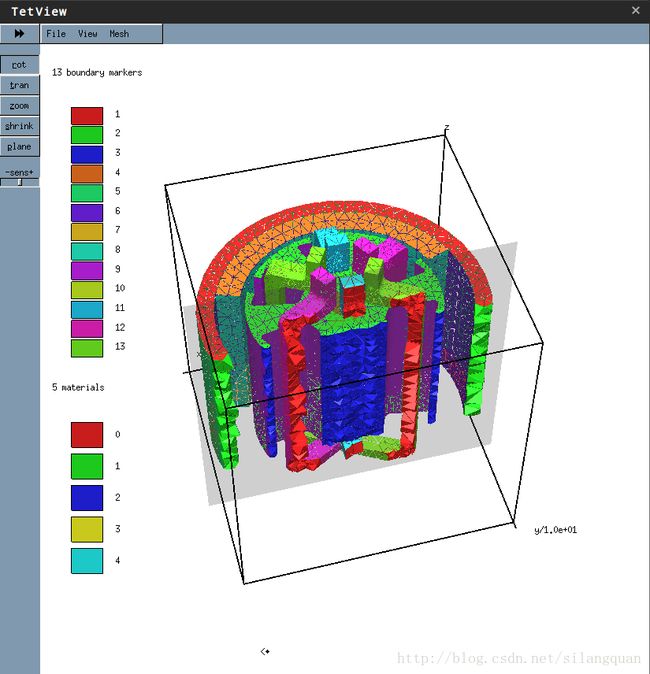
将下载好linux版本的tetivew解压,再将example解压到相同的目录,终端cd进目录,执行:
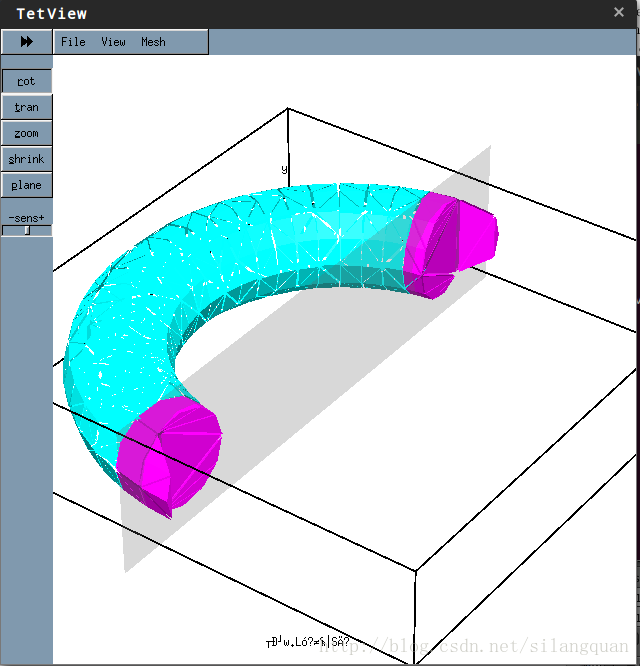
./tetview pmdc.1
一切配置正确的话,tetview就运行了。很简单的一个操作界面,按F1沿着plane剖分,效果就像这样:
网格剖分实战
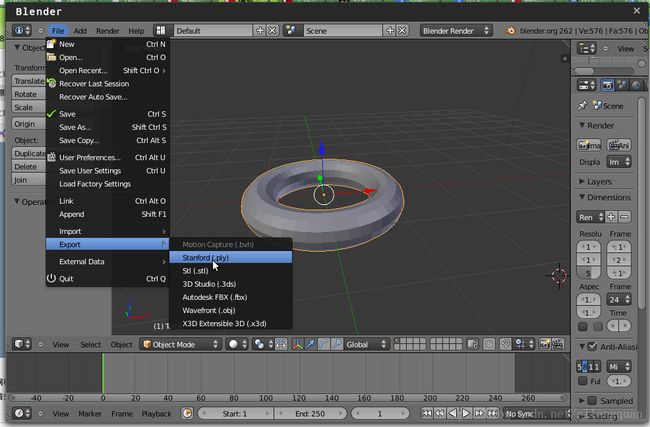
首先打开blender,Add->Mesh->Torus,添加一个圆环,然后File->Export->Stanford(.ply),导出ply文件,待会用于剖分。
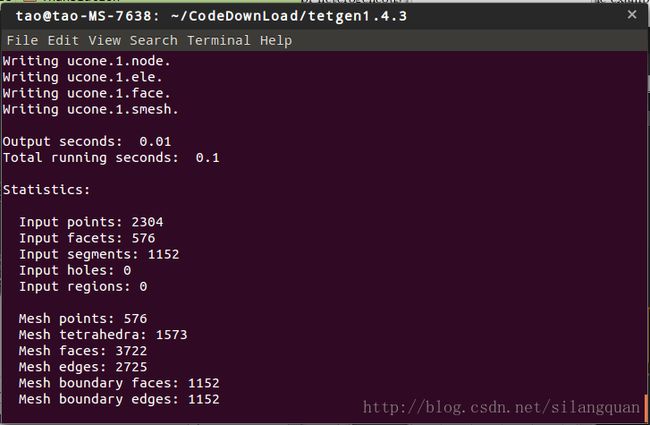
将导出的ply模型放到tetgen的目录,终端执行:
./tetgen -p torus.ply
再将生成的文件拷贝到tetiew的目录下,执行
./tetview torus.1.ele
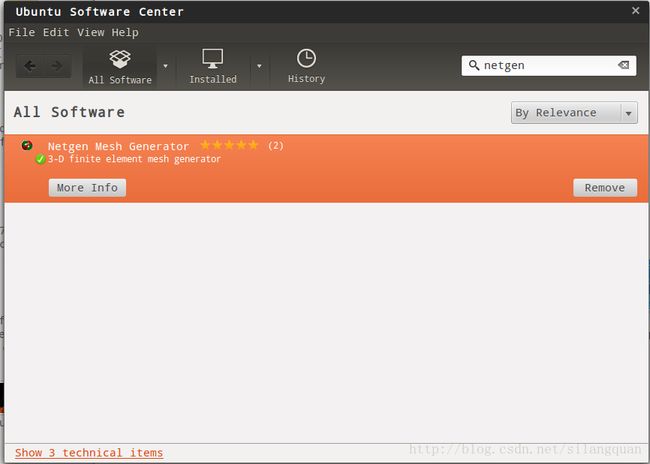
Netgen
这个东西编译起来还是有点头疼,还在ubuntu的软件中心有带,所以直接在软件中心搜索下载就可以了。
还是选择用blender导出模型。这里一定要记住,所有用于网格剖分的模型都要是封闭的体模型,不然就会出现闪退的情况。
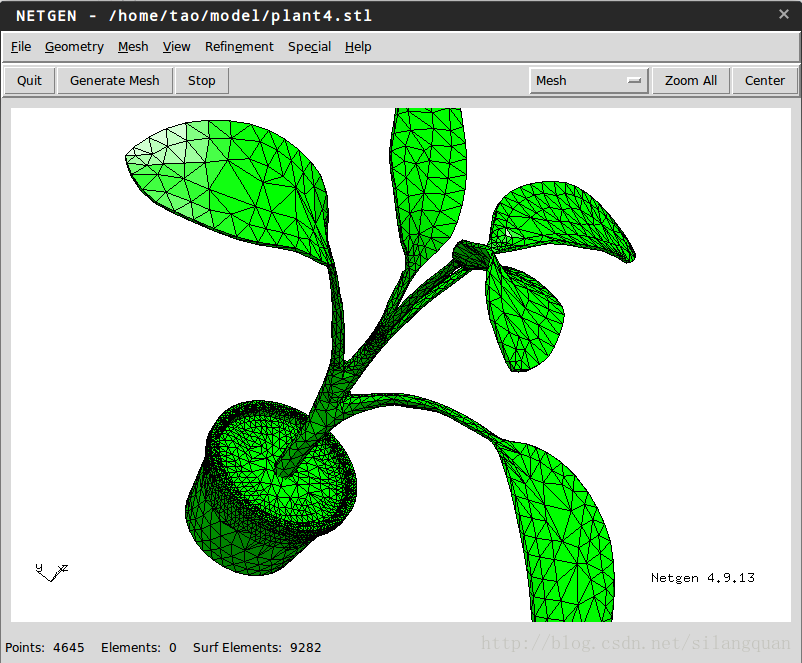
这里选择一个植物模型,File ->Export->stl。记住勾选左边的ascii。
打开netgen,File ->Load Geometry,选择刚才导出的模型。然后点击工具栏中的GnerateMesh,稍等片刻,得到结果。
导出单元
首先选择导出类型:
File -> Export File type ->Elmer Format
然后导出:
File-> Export Mesh
Stellar
从官网下载好源码之后解压,终端进入目录,运行
make
Stellar就编译好了。
将之前的用tetgen生成的 model.1.node 和 model.1.ele 文件拷贝至Stellar的文件夹,终端执行
Stellar model.1
发现报错:
Improving mesh.
***** ALERT Input mesh has non-positive worst quality of -0.85263, dying *****
Starting up smoothing, input tet has quality -0.85263
Stellar: ./src/smoothing.c:1640: nonsmooth: Assertion `worstqual > 0.0' failed.
Aborted (core dumped)
发邮件为问作者,说是单元模型三角面没有遵循右手法则,用meshconvert.py官网给的脚本转化一下就好。
终端执行./meshconvert.py model.1.node model.2.node
执行完成之后会生成新的ele,node文件,这时再在终端运行Stellar,
Stellar model.2
原来的模型有6000多个顶点,经过大概10分钟的优化,生成了一个20000点的模型...T T
原因可能是在平滑处理的过程中插入了很多点,在优化结果中,还会生成一个stats文件,里面描述了整个优化过程。
如果要控制优化的过程的话,需要自己写配置文件,修改一下官网给的模板就可以了,比如我不想增加单元格的数量,则关闭顶点的插入就可以了。
创建一个 conf 文件
- ####################################
- #Stellarmeshimprovementoptions#
- ####################################
- #Thisfilecontainsallthepossibleoptionsthatcancurrentlybesetfor
- #meshimprovement.Linesthatbeginwith'#'arecommentsandareignored.
- #Otherlinestaketheform'optionintvalfloatvalstringval',whereoption
- #isthenameoftheoption,andintvalfloatvalandstringvalarethepossible
- #fieldsthatcanbeusedtosetthatoption.Ifanoptiontakesanint,only
- #avalueforintneedstobegiven.Ifit'safloat,adummyintshouldbe
- #insertedbeforethefloat.Ifit'sastring,adummyintandadummyfloat
- #shouldbeinsertedbeforethestring.ThisclumsinessisbecauseIdon'tlike
- #codingstringprocessinginC,andthisistheeasiestway.Anyunsetoptions
- #willassumetheirdefaultvalues.
- #verbosity:biggernumbermeansmoreverboseoutputofimprovement.
- #default=1
- verbosity0
- #usecolorinverboseimprovementoutput.default=0
- usecolor1
- #justoutputthemeshunchangedandquit.default=0
- outputandquit0
- ##qualitymeasureoptions
- #qualmeasure:selectswhichqualitymeasuretouseasanobjectivefunction
- #foroptimizingthetetrahedra.Thequalitymeasuresaredescribedin
- #Chapter2ofBryan'sdissertation.default=0
- #0=minimumsineofthedihedralangles(default)
- #1=squarerootofradiusratio(circumradiusdividedbyinradius)
- #2=V/l_rms^3(volumedividedbycubeofroot-mean-squarededgelength)
- #5=minimumsinewithbiasedobtuseangles
- qualmeasure5
- #sinewarpfactor:float.forqualmeasure5only;setsthefactorbywhich
- #obtuseanglesarescaledrelativetoacuteangles.Defaultis0.75
- sinewarpfactor00.75
- ##terminationoptions
- #BOTHgoalanglesmustbereachedtoterminateimprovement
- #goalanglemin:float.terminatesimprovementearlyifminimumanglereaches
- #thisvalue.default=90.0(whichprecludesearlytermination)
- goalanglemin090.0
- #goalanglemax:float.terminatesimprovementearlyifmaximumanglereaches
- #thisvalue.default=90.0
- goalanglemax090.0
- ##smoothingoptions
- #nonsmooth:enableoptimization-basedsmoothing.default=1
- nonsmooth1
- #facetsmooth:enablesmoothingoffacetvertices.default=1
- facetsmooth1
- #segmentsmooth:enablesmoothingofsegmentvertices.default=1
- segmentsmooth1
- #usequadrics:enableuseofsurfacequadricerrorforsmoothingfixedboundary
- #vertices.WARNING:thiswillallowthedomainshapetochangeslightly.But
- #evenalittleplaysometimesyieldsmuchbettermeshes.default=0
- usequadrics0
- #quadricoffset:amounttostartquadricerroratbeforesubtracting.
- #SeealphainSection3.2.5ofBryan'sdissertation.default=0.8
- quadricoffset00.8
- #quadricscale:amounttoscalequadricerrorbeforesubtractingfromoffset.
- #SeebetainSection3.2.5ofBryan'sdissertation.default=300.0
- quadricscale0300.0
- ##topologicaltransformationoptions
- #flip22:enable2-2flips(forboundarytets).default=1
- flip221
- #multifaceremoval:enablemulti-faceremoval.singlefaceremovalmightstill
- #beon.default=1
- multifaceremoval1
- #singlefaceremoval:enablesinglefaceremoval(2-3and2-2flips).Has
- #noeffectwhenmultifaceremovalisenabled.default=1
- singlefaceremoval1
- #edgeremoval:enableedgeremoval.default=1
- edgeremoval1
- ##edgecontractionoptions
- #edgecontraction:enableedgecontraction.default=1
- edgecontraction1
- ##vertexinsertionoptions
- #enableinsert:enableALLvertexinsertion(overridesothers).default=1
- enableinsert0
- #insertbody:enablejustvertexinsertioninbody(interior).default=1
- insertbody0
- #insertfacet:enablejustinsertiononfacets.default=1
- insertfacet0
- #insertsegment:enablejustinsertiononsegments.default=1
- insertsegment0
- #insertthreshold:oneachinsertionpass,tryvertexinsertioninthis
- fractionofthetetrahedra.default=0.031(theworst3.1%)
- insertthreshold00.031
- ##sizecontroloptions
- #(SeeChapter6ofBryan'sdissertation.)
- #sizing:enablecontrolofelementsizes.default=0
- sizing0
- #sizingpass:enableedgelengthcorrectionbeforequalityimprovement.
- #default=0
- sizingpass0
- #targetedgelength:thetargetedgelengthforthismesh.Ifsetto0.0,the
- #targetedgelengthisinitializedautomaticallytotheinitialmeanedge
- #length.default=0.0
- targetedgelength00.0
- #longerfactor:factorbywhichanedgecanbelongerthanthetargetedge
- #lengthbeforebeingconsidered"toolong".default=3.0
- longerfactor02.0
- #shorterfactor:factorbywhichanedgecanbeshorterthanthetargetedge
- #lengthbeforebeingconsidered"tooshort"default=0.33
- shorterfactor00.50
- ##anisotropyoptions
- #(SeeChapter7ofBryan'sdissertation.)
- #anisotropic:enableanisotropicmeshing.default=0
- anisotropic0
- #tensor:whichsize/anisotropytensortouse.default=0
- #0=identity
- #1=stretchx
- #2=stretchy
- #3=sink
- #4=swirl
- #5=center
- #6=perimeter
- #7=right
- #8=sine
- tensor6
- ##qualityfileoutputoptions
- #Thesefileslist,foreachtetrahedron,thevaluesofthequalitymeasures
- #minsineout:enableoutputof.minsinequalityfile.default=1
- minsineout1
- #minangout:enableoutputof.minangqualityfile.default=0
- minangout0
- #maxangout:enableoutputof.maxangqualityfile.default=0
- maxangout0
- #vlrmsout:enableoutputof.vlrmsqualityfile.default=0
- vlrmsout0
- #nrrout:enableoutputofthe.nrrqualityfile.default=0
- nrrout0
- ##animationoptions
- #animate:activateanimationfileoutput(asetofoutputfilesaftereach
- #pass).default=0
- animate0
- #timeseries:whenanimate=1,onlyoutput.stats.default=0
- timeseries0
- ##outputfilenameoption
- #fileprefix:filenameprefixthatdistinguishestheoutputfilesfromthe
- #inputfiles.Ifnonespecified,aniterationnumberisappendedtotheinput
- #filenames.
- #fileprefix05../output/testprefix
####################################
# Stellar mesh improvement options #
####################################
# This file contains all the possible options that can currently be set for
# mesh improvement. Lines that begin with '#' are comments and are ignored.
# Other lines take the form 'option intval floatval stringval', where option
# is the name of the option, and intval floatval and stringval are the possible
# fields that can be used to set that option. If an option takes an int, only
# a value for int needs to be given. If it's a float, a dummy int should be
# inserted before the float. If it's a string, a dummy int and a dummy float
# should be inserted before the string. This clumsiness is because I don't like
# coding string processing in C, and this is the easiest way. Any unset options
# will assume their default values.
# verbosity: bigger number means more verbose output of improvement.
# default = 1
verbosity 0
# use color in verbose improvement output. default = 0
usecolor 1
# just output the mesh unchanged and quit. default = 0
outputandquit 0
## quality measure options
# qualmeasure: selects which quality measure to use as an objective function
# for optimizing the tetrahedra. The quality measures are described in
# Chapter 2 of Bryan's dissertation. default = 0
# 0 = minimum sine of the dihedral angles (default)
# 1 = square root of radius ratio (circumradius divided by inradius)
# 2 = V / l_rms^3 (volume divided by cube of root-mean-squared edge length)
# 5 = minimum sine with biased obtuse angles
qualmeasure 5
# sinewarpfactor: float. for qualmeasure 5 only; sets the factor by which
# obtuse angles are scaled relative to acute angles. Default is 0.75
sinewarpfactor 0 0.75
## termination options
# BOTH goal angles must be reached to terminate improvement
# goalanglemin: float. terminates improvement early if minimum angle reaches
# this value. default = 90.0 (which precludes early termination)
goalanglemin 0 90.0
# goalanglemax: float. terminates improvement early if maximum angle reaches
# this value. default = 90.0
goalanglemax 0 90.0
## smoothing options
# nonsmooth: enable optimization-based smoothing. default = 1
nonsmooth 1
# facetsmooth: enable smoothing of facet vertices. default = 1
facetsmooth 1
# segmentsmooth: enable smoothing of segment vertices. default = 1
segmentsmooth 1
# usequadrics: enable use of surface quadric error for smoothing fixed boundary
# vertices. WARNING: this will allow the domain shape to change slightly. But
# even a little play sometimes yields much better meshes. default = 0
usequadrics 0
# quadricoffset: amount to start quadric error at before subtracting.
# See alpha in Section 3.2.5 of Bryan's dissertation. default = 0.8
quadricoffset 0 0.8
# quadricscale: amount to scale quadric error before subtracting from offset.
# See beta in Section 3.2.5 of Bryan's dissertation. default = 300.0
quadricscale 0 300.0
## topological transformation options
# flip22: enable 2-2 flips (for boundary tets). default = 1
flip22 1
# multifaceremoval: enable multi-face removal. singlefaceremoval might still
# be on. default = 1
multifaceremoval 1
# singlefaceremoval: enable single face removal (2-3 and 2-2 flips). Has
# no effect when multifaceremoval is enabled. default = 1
singlefaceremoval 1
# edgeremoval: enable edge removal. default = 1
edgeremoval 1
## edge contraction options
# edgecontraction: enable edge contraction. default = 1
edgecontraction 1
## vertex insertion options
# enableinsert: enable ALL vertex insertion (overrides others). default = 1
enableinsert 0
# insertbody: enable just vertex insertion in body (interior). default = 1
insertbody 0
# insertfacet: enable just insertion on facets. default = 1
insertfacet 0
# insertsegment: enable just insertion on segments. default = 1
insertsegment 0
# insertthreshold: on each insertion pass, try vertex insertion in this
fraction of the tetrahedra. default = 0.031 (the worst 3.1%)
insertthreshold 0 0.031
## size control options
# (See Chapter 6 of Bryan's dissertation.)
# sizing: enable control of element sizes. default = 0
sizing 0
# sizingpass: enable edge length correction before quality improvement.
# default = 0
sizingpass 0
# targetedgelength: the target edge length for this mesh. If set to 0.0, the
# target edge length is initialized automatically to the initial mean edge
# length. default = 0.0
targetedgelength 0 0.0
# longerfactor: factor by which an edge can be longer than the target edge
# length before being considered "too long". default = 3.0
longerfactor 0 2.0
# shorterfactor: factor by which an edge can be shorter than the target edge
# length before being considered "too short" default = 0.33
shorterfactor 0 0.50
## anisotropy options
# (See Chapter 7 of Bryan's dissertation.)
# anisotropic: enable anisotropic meshing. default = 0
anisotropic 0
# tensor: which size/anisotropy tensor to use. default = 0
# 0 = identity
# 1 = stretch x
# 2 = stretch y
# 3 = sink
# 4 = swirl
# 5 = center
# 6 = perimeter
# 7 = right
# 8 = sine
tensor 6
## quality file output options
# These files list, for each tetrahedron, the values of the quality measures
# minsineout: enable output of .minsine quality file. default = 1
minsineout 1
# minangout: enable output of .minang quality file. default = 0
minangout 0
# maxangout: enable output of .maxang quality file. default = 0
maxangout 0
# vlrmsout: enable output of .vlrms quality file. default = 0
vlrmsout 0
# nrrout: enable output of the .nrr quality file. default = 0
nrrout 0
## animation options
# animate: activate animation file output (a set of output files after each
# pass). default = 0
animate 0
# timeseries: when animate = 1, only output .stats. default = 0
timeseries 0
## output filename option
# fileprefix: filename prefix that distinguishes the output files from the
# input files. If none specified, an iteration number is appended to the input
# filenames.
#fileprefix 0 5 ../output/testprefix再次运行,
./Stellar -s conf model.2
运行结果:

顶点从6000多降到了5000多,用tetiew来查看:
