ROS 下利用 usb_cam 读取图像、opencv 图像、摄像头的标定
最近导师让我做一个小项目:检测汽车的充电孔与充电桩的的距离(x,y,z)和角度。为了控制成本,扔给我一个淘宝上十几块钱的摄像头。检测和计算部分再此不细说,本文只总结一下,一个普通的摄像头,如何在 ubuntu 下写一个 ROS 包,将图像读取和发布出来。
1、判断摄像头的类型
在 ROS 中,有两类,一类是 uvc,一类是 usb 。不同类别对应不同的软件包。以我这个摄像头为例。先
lsusb结果如下:(两幅图分别对应插入摄像头前后的结果)
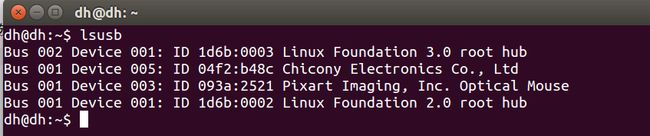

由上可知,我的摄像头的 ID 是 05a3:9230 。接着,去网址 http://www.ideasonboard.org/uvc/ 查找 ID(05a3:9230 ),看是否支持。如果支持,就是 uvc 类型。如果不支持,就是 usb 类型,一般来说都是 usb 类型。我的是 usb 类型。
2、 安装usb_cam包,读取图像
依次输入以下命令即可。
cd catkin_ws/src // 你可以根据自己的需求,创建文件夹,我的直接安装在 catkin_make 里面了
git clone https://github.com/bosch-ros-pkg/usb_cam.git
cd ..
catkin_make插入摄像头,确定自己的摄像头是viedo0还是viedo1还是其他
cd /dev &&find . -name "video*"显示如下:

现在有两个设备,一个是 video0(我的设备),一个是 video1(笔记本电脑的摄像头)。打开catkin_ws/src/usb_cam/launch 里面的 usb_cam-test.launch。显示如下:
rosrun image_view image_view image:=/usb_cam/image_raw
其中,第三行 根据实际情况,改成自己的设备名。然后运行:
roslaunch usb_cam usb_cam-test.launch即可显示图像。
当然了,你也可以以运行节点的方式,来打开摄像头。先运行 usb_cam 节点。
rosrun usb_cam usb_cam_node此时,你会发现,并没有图像,只是摄像头被打开了而已。我们需要运行打开图像才可以:
rosrun image_view image_view image:=/usb_cam/image_raw后面那个 /usb_cam/image_raw 是怎么确定的呢?你需要利用 rostopic list ,来确定图像节点的名称。在此不赘述。
3、将 ros 图像转成 Opencv 能够处理的图像
接下来,我们看usb_cam采集的图像怎么让opencv处理。ros提供了一个cv_bridge用以转换Ros采集到图像到opencv能处理的图像。这里主要参考官网对于cv_bridge的解释及其使用:
http://wiki.ros.org/cv_bridge/Tutorials/UsingCvBridgeToConvertBetweenROSImagesAndOpenCVImages
包创建:http://wiki.ros.org/ROS/Tutorials/CreatingPackage
这里需要新建opecv的测试工作空间,opencv测试依赖于:
sensor_msgs
cv_bridge
roscpp
std_msgs
image_transport进入~/catkin_ws/src,创建测试包:
catkin_create_pkg opencvtest sensor_msgs cv_bridge roscpp std_msgs image_transport 创建好包之后,进入~/catkin_ws/src/opencvtest/src,将官网的代码保存到此处,命名为opencv_testcam.cpp
#include
#include
#include
#include
#include
#include
static const std::string OPENCV_WINDOW = "Image window";
class ImageConverter
{
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Publisher image_pub_;
public:
ImageConverter()
: it_(nh_)
{
// Subscrive to input video feed and publish output video feed
image_sub_ = it_.subscribe("/usb_cam/image_raw", 1,
&ImageConverter::imageCb, this);
image_pub_ = it_.advertise("/image_converter/output_video", 1);
cv::namedWindow(OPENCV_WINDOW);
}
~ImageConverter()
{
cv::destroyWindow(OPENCV_WINDOW);
}
void imageCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
// Draw an example circle on the video stream
if (cv_ptr->image.rows > 60 && cv_ptr->image.cols > 60)
cv::circle(cv_ptr->image, cv::Point(50, 50), 10, CV_RGB(255,0,0));
// Update GUI Window
cv::imshow(OPENCV_WINDOW, cv_ptr->image);
cv::waitKey(3);
// Output modified video stream
image_pub_.publish(cv_ptr->toImageMsg());
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_converter");
ImageConverter ic;
ros::spin();
return 0;
} 以上代码不解释了,可以查看官网的解释。这里需要注意的是代码:
image_sub_ = it_.subscribe("/usb_cam/image_raw", 1,
&ImageConverter::imageCb, this);这里是usb摄像头的topic,官网默认是/camera/image_raw,这里修改为usb摄像头。
保存退出后,进入上个目录,修改CmakeList.txt,在文件最后添加:
find_package(OpenCV)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(opencv_testcam src/opencv_testcam.cpp)
target_link_libraries(opencv_testcam ${catkin_LIBRARIES} ${OpenCV_LIBRARIES})然后,返回工作空间~/catkin_ws执行catkin_make编译工程。
编译完成后,执行
source devel/setup.bash
当然,你可以利用 gedit .bashrc 直接source ,一劳永逸。
最终测试:先按照步骤 2 的方法,打开摄像头,然后,再打开一个终端运行:
rosrun opencvtest opencv_testcam之后,即可看到opencv处理后摄像头的图像。
4、标定
使用摄像头之前,一定要标定!!标定参考链接:http://blog.csdn.net/heyijia0327/article/details/43538695