分析Camera预览的过程,我是通过从底层向上层分析的,从jni->Native->HAL->v4l2->java。
3.1 JNI
在java framework层中调用native方法:
frameworks/base/core/java/androidhardware/Camera.java
public native final void startPreview();
进入JNI层调用相关方法:
frameworks/base/core/jni/android_hardware_Camera.cpp.
static void android_hardware_Camera_startPreview(JNIEnv *env, jobject thiz)
{
ALOGV("startPreview");
//获取native层中的Camera.cpp的实例
sp camera = get_native_camera(env, thiz, NULL);
if (camera == 0) return;
//调用native的startPreview()方法,并判断其返回值
if (camera->startPreview() != NO_ERROR) {
jniThrowRuntimeException(env, "startPreview failed");
return;
}
}
3.2 Native层
进入native层,首先调用的是在JNI应用的startPreview()方法:
// start preview mode
status_t Camera::startPreview()
{
ALOGV("startPreview");
sp c = mCamera;
if (c == 0) return NO_INIT;
return c->startPreview();
}
根据前面所分析的结果,其实就会调用到CameraService中CameraClient.cpp中
status_t CameraClient::startPreview() {
LOG1("startPreview (pid %d)", getCallingPid());
return startCameraMode(CAMERA_PREVIEW_MODE);
}
CAMERA_PREVIEW_MODE,枚举类型是在CameraClient.h中定义的 。之后调用startCameraMode方法:
// start preview or recording
status_t CameraClient::startCameraMode(camera_mode mode) {
LOG1("startCameraMode(%d)", mode);
Mutex::Autolock lock(mLock);
status_t result = checkPidAndHardware();
if (result != NO_ERROR) return result;
switch(mode) {
//照相时的预览
case CAMERA_PREVIEW_MODE:
if (mSurface == 0 && mPreviewWindow == 0) {
LOG1("mSurface is not set yet.");
// still able to start preview in this case.
}
return startPreviewMode();
//录像时的预览
case CAMERA_RECORDING_MODE:
if (mSurface == 0 && mPreviewWindow == 0) {
ALOGE("mSurface or mPreviewWindow must be set before startRecordingMode.");
return INVALID_OPERATION;
}
return startRecordingMode();
default:
return UNKNOWN_ERROR;
}
}
在照相预览模式中,调用startPreviewMode方法:
status_t CameraClient::startPreviewMode() {
LOG1("startPreviewMode");
status_t result = NO_ERROR;
// if preview has been enabled, nothing needs to be done
if (mHardware->previewEnabled()) {
return NO_ERROR;
}
if (mPreviewWindow != 0) {
//适配显示窗口的大小
native_window_set_scaling_mode(mPreviewWindow.get(),
NATIVE_WINDOW_SCALING_MODE_SCALE_TO_WINDOW);
//调整帧数据的方向
native_window_set_buffers_transform(mPreviewWindow.get(),
mOrientation);
}
//设置mPreviewWindow为显示窗口
mHardware->setPreviewWindow(mPreviewWindow);
//HAL层启动预览
result = mHardware->startPreview();
if (result == NO_ERROR) {
mCameraService->updateProxyDeviceState(
ICameraServiceProxy::CAMERA_STATE_ACTIVE,
String8::format("%d", mCameraId));
}
return result;
}
其中mPreviewWindow是数据将要投射的预览窗口,是从应用层中的启动预览时设置的
。native_window_set_scaling_mode方法是设置窗口的缩放比例,native_window_set_buffers_transform设置数据的放向。之后启动了HAL层的启动预览的方法。
3.3 HAL层
下面进入到HAL层的处理frameworks\av\services\camera\libcameraservice\device1\ CameraHardwareInterface.h
/** Set the ANativeWindow to which preview frames are sent */
status_t setPreviewWindow(const sp& buf)
{
ALOGV("%s(%s) buf %p", __FUNCTION__, mName.string(), buf.get());
if (mDevice->ops->set_preview_window) {
mPreviewWindow = buf;
mHalPreviewWindow.user = this;
ALOGV("%s &mHalPreviewWindow %p mHalPreviewWindow.user %p", __FUNCTION__,
&mHalPreviewWindow, mHalPreviewWindow.user);
return mDevice->ops->set_preview_window(mDevice,
buf.get() ? &mHalPreviewWindow.nw : 0);
}
return INVALID_OPERATION;
}
status_t startPreview()
{
ALOGV("%s(%s)", __FUNCTION__, mName.string());
if (mDevice->ops->start_preview)
return mDevice->ops->start_preview(mDevice);
return INVALID_OPERATION;
}
在HAL的接口定义中没有具体实现方法,交给了不同厂商的HAL层进行处理。对于LN50B63的hal层具体实现的代码路径:hardware\qcom\camera\QCamera2\HAL\,并且接下来分析的都是Non-ZSL模式,也就是标准的模式。ZSL模式是快速拍照模式,其处理模式与标准模式不同。
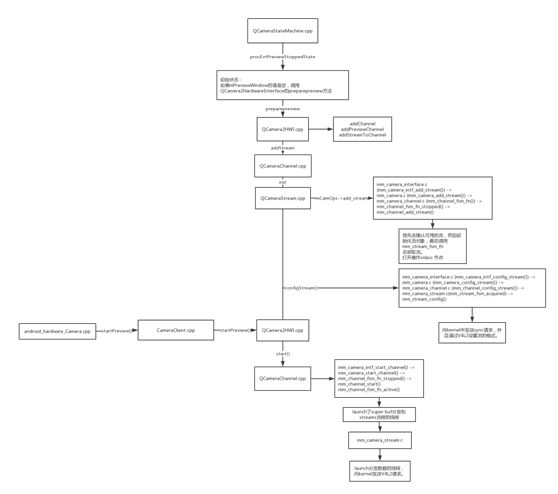
首先从hardware\qcom\camera\QCamera2\HAL\QCameraStateMachine.cpp状态机的初始状态procEvtPreviewStoppedState开始。
int32_t QCameraStateMachine::procEvtPreviewStoppedState(qcamera_sm_evt_enum_t evt,
void *payload)
{
int32_t rc = NO_ERROR;
qcamera_api_result_t result;
memset(&result, 0, sizeof(qcamera_api_result_t));
switch (evt) {
... ...
case QCAMERA_SM_EVT_START_PREVIEW:
{
ALOGE("bluedai procEvtPreviewStoppedState");
if (m_parent->mPreviewWindow == NULL) {
rc = m_parent->preparePreview();
if(rc == NO_ERROR) {
// preview window is not set yet, move to previewReady state
m_state = QCAMERA_SM_STATE_PREVIEW_READY;
} else {
ALOGE("%s: preparePreview failed",__func__);
}
} else {
rc = m_parent->preparePreview();
if (rc == NO_ERROR) {
rc = m_parent->startPreview();
if (rc != NO_ERROR) {
m_parent->unpreparePreview();
} else {
// start preview success, move to previewing state
m_state = QCAMERA_SM_STATE_PREVIEWING;
}
}
}
result.status = rc;
result.request_api = evt;
result.result_type = QCAMERA_API_RESULT_TYPE_DEF;
m_parent->signalAPIResult(&result);
}
break;
如果mPreviewWindow的值是空,调用QCamera2HardwareInterface的preparepreview方法;如果mPreviewWindow不为空,则直接开启QCamera2HardwareInterface的startPreview方法。
QCamera2HardwareInterface是HAL层方法的接口,真正的实现是在hardware\qcom\camera\QCamera2\HAL\ QCamera2HWI.cpp中。
int32_t QCamera2HardwareInterface::preparePreview()
{
ALOGE("bluedai qcamera2hwi preparePreview");
ATRACE_CALL();
int32_t rc = NO_ERROR;
if (mParameters.isZSLMode() && mParameters.getRecordingHintValue() !=true) {
rc = addChannel(QCAMERA_CH_TYPE_ZSL);
if (rc != NO_ERROR) {
return rc;
}
} else {
bool recordingHint = mParameters.getRecordingHintValue();
if(recordingHint) {
//stop face detection,longshot,etc if turned ON in Camera mode
int32_t arg; //dummy arg
#ifndef VANILLA_HAL
if (isLongshotEnabled()) {
sendCommand(CAMERA_CMD_LONGSHOT_OFF, arg, arg);
}
#endif
if (mParameters.isFaceDetectionEnabled()) {
sendCommand(CAMERA_CMD_STOP_FACE_DETECTION, arg, arg);
}
#ifndef VANILLA_HAL
if (mParameters.isHistogramEnabled()) {
sendCommand(CAMERA_CMD_HISTOGRAM_OFF, arg, arg);
}
#endif
cam_dimension_t videoSize;
mParameters.getVideoSize(&videoSize.width, &videoSize.height);
if (!is4k2kResolution(&videoSize) && !mParameters.isLowPowerEnabled()) {
rc = addChannel(QCAMERA_CH_TYPE_SNAPSHOT);
if (rc != NO_ERROR) {
return rc;
}
}
rc = addChannel(QCAMERA_CH_TYPE_VIDEO);
if (rc != NO_ERROR) {
delChannel(QCAMERA_CH_TYPE_SNAPSHOT);
return rc;
}
}
rc = addChannel(QCAMERA_CH_TYPE_PREVIEW);
if (rc != NO_ERROR) {
if (recordingHint) {
delChannel(QCAMERA_CH_TYPE_SNAPSHOT);
delChannel(QCAMERA_CH_TYPE_VIDEO);
}
return rc;
}
if (!recordingHint) {
waitDefferedWork(mMetadataJob);
}
}
return rc;
}
首先判断拍照的模式是否是ZSL模式,然后调用的其实是addChannel方法,在addChannel方法中,调用了addPreviewChannel方法。
int32_t QCamera2HardwareInterface::addPreviewChannel()
{
int32_t rc = NO_ERROR;
QCameraChannel *pChannel = NULL;
if (m_channels[QCAMERA_CH_TYPE_PREVIEW] != NULL) {
CDBG_HIGH("%s : Preview Channel already added and so delete it", __func__);
delete m_channels[QCAMERA_CH_TYPE_PREVIEW];
m_channels[QCAMERA_CH_TYPE_PREVIEW] = NULL;
}
pChannel = new QCameraChannel(mCameraHandle->camera_handle,
mCameraHandle->ops);
if (NULL == pChannel) {
ALOGE("%s: no mem for preview channel", __func__);
return NO_MEMORY;
}
// preview only channel, don't need bundle attr and cb
rc = pChannel->init(NULL, NULL, NULL);
if (rc != NO_ERROR) {
ALOGE("%s: init preview channel failed, ret = %d", __func__, rc);
delete pChannel;
return rc;
}
// meta data stream always coexists with preview if applicable
rc = addStreamToChannel(pChannel, CAM_STREAM_TYPE_METADATA,
metadata_stream_cb_routine, this);
if (rc != NO_ERROR) {
ALOGE("%s: add metadata stream failed, ret = %d", __func__, rc);
delete pChannel;
return rc;
}
if (isNoDisplayMode()) {
rc = addStreamToChannel(pChannel, CAM_STREAM_TYPE_PREVIEW,
nodisplay_preview_stream_cb_routine, this);
} else {
rc = addStreamToChannel(pChannel, CAM_STREAM_TYPE_PREVIEW,
preview_stream_cb_routine, this);
}
if (rc != NO_ERROR) {
ALOGE("%s: add preview stream failed, ret = %d", __func__, rc);
delete pChannel;
return rc;
}
m_channels[QCAMERA_CH_TYPE_PREVIEW] = pChannel;
return rc;
}
在addPreviewChannel方法中,对QCameraChannel进行了实例化,并且调用了初始化方法init方法,然后调用addStreamToChannel方法,把数据加载到对应的管道中。维护了m_channels数组,最后的时候将QCAMERA_CH_TYPE_PREVIEW的元素设置成了当前的QCameraChannel对象。
int32_t QCamera2HardwareInterface::addStreamToChannel(QCameraChannel *pChannel,
cam_stream_type_t streamType,
stream_cb_routine streamCB,
void *userData)
{
ALOGE("bluedai qcamera2hwi addStreamToChannel");
int32_t rc = NO_ERROR;
if (streamType == CAM_STREAM_TYPE_RAW) {
prepareRawStream(pChannel);
}
QCameraHeapMemory *pStreamInfo = allocateStreamInfoBuf(streamType);
if (pStreamInfo == NULL) {
ALOGE("%s: no mem for stream info buf", __func__);
return NO_MEMORY;
}
uint8_t minStreamBufNum = getBufNumRequired(streamType);
bool bDynAllocBuf = false;
if (isZSLMode() && streamType == CAM_STREAM_TYPE_SNAPSHOT) {
bDynAllocBuf = true;
}
if ( ( streamType == CAM_STREAM_TYPE_SNAPSHOT ||
streamType == CAM_STREAM_TYPE_POSTVIEW ||
streamType == CAM_STREAM_TYPE_METADATA ||
streamType == CAM_STREAM_TYPE_RAW) &&
!isZSLMode() &&
!isLongshotEnabled() &&
!mParameters.getRecordingHintValue()) {
rc = pChannel->addStream(*this,
pStreamInfo,
minStreamBufNum,
&gCamCapability[mCameraId]->padding_info,
streamCB, userData,
bDynAllocBuf,
true);
// Queue buffer allocation for Snapshot and Metadata streams
if ( !rc ) {
DefferWorkArgs args;
DefferAllocBuffArgs allocArgs;
memset(&args, 0, sizeof(DefferWorkArgs));
memset(&allocArgs, 0, sizeof(DefferAllocBuffArgs));
allocArgs.type = streamType;
allocArgs.ch = pChannel;
args.allocArgs = allocArgs;
if (streamType == CAM_STREAM_TYPE_SNAPSHOT) {
mSnapshotJob = queueDefferedWork(CMD_DEFF_ALLOCATE_BUFF,
args);
if ( mSnapshotJob == -1) {
rc = UNKNOWN_ERROR;
}
} else if (streamType == CAM_STREAM_TYPE_METADATA) {
mMetadataJob = queueDefferedWork(CMD_DEFF_ALLOCATE_BUFF,
args);
if ( mMetadataJob == -1) {
rc = UNKNOWN_ERROR;
}
} else if (streamType == CAM_STREAM_TYPE_RAW) {
mRawdataJob = queueDefferedWork(CMD_DEFF_ALLOCATE_BUFF,
args);
if ( mRawdataJob == -1) {
rc = UNKNOWN_ERROR;
}
}
}
} else {
rc = pChannel->addStream(*this,
pStreamInfo,
minStreamBufNum,
&gCamCapability[mCameraId]->padding_info,
streamCB, userData,
bDynAllocBuf,
false);
}
if (rc != NO_ERROR) {
ALOGE("%s: add stream type (%d) failed, ret = %d",
__func__, streamType, rc);
pStreamInfo->deallocate();
delete pStreamInfo;
// Returning error will delete corresponding channel but at the same time some of
// deffered streams in same channel might be still in process of allocating buffers
// by CAM_defrdWrk thread.
waitDefferedWork(mMetadataJob);
waitDefferedWork(mPostviewJob);
waitDefferedWork(mSnapshotJob);
waitDefferedWork(mRawdataJob);
return rc;
}
return rc;
}
可以看出,在此方法中设置的Snapshot和Metadata流,并且分配buffer。然后调用
hardware\qcom\camera\QCamera2\HAL\ QCameraChannel.cpp的addStream方法。
int32_t QCameraChannel::addStream(QCameraAllocator &allocator,
QCameraHeapMemory *streamInfoBuf,
uint8_t minStreamBufNum,
cam_padding_info_t *paddingInfo,
stream_cb_routine stream_cb,
void *userdata,
bool bDynAllocBuf,
bool bDeffAlloc)
{
int32_t rc = NO_ERROR;
if (mStreams.size() >= MAX_STREAM_NUM_IN_BUNDLE) {
ALOGE("%s: stream number (%d) exceeds max limit (%d)",
__func__, mStreams.size(), MAX_STREAM_NUM_IN_BUNDLE);
return BAD_VALUE;
}
QCameraStream *pStream = new QCameraStream(allocator,
m_camHandle,
m_handle,
m_camOps,
paddingInfo,
bDeffAlloc);
if (pStream == NULL) {
ALOGE("%s: No mem for Stream", __func__);
return NO_MEMORY;
}
rc = pStream->init(streamInfoBuf, minStreamBufNum,
stream_cb, userdata, bDynAllocBuf);
if (rc == 0) {
mStreams.add(pStream);
} else {
delete pStream;
}
return rc;
}
实例化QCameraStream,并且调用初始化init方法,其中mStreams 是装有QCameraStream 的容器,在vector中添加此pStream 实例。
hardware\qcom\camera\QCamera2\HAL\ QCameraStream.cpp
int32_t QCameraStream::init(QCameraHeapMemory *streamInfoBuf,
uint8_t minNumBuffers,
stream_cb_routine stream_cb,
void *userdata,
bool bDynallocBuf)
{
int32_t rc = OK;
ssize_t bufSize = BAD_INDEX;
mHandle = mCamOps->add_stream(mCamHandle, mChannelHandle);
if (!mHandle) {
ALOGE("add_stream failed");
rc = UNKNOWN_ERROR;
goto done;
}
// assign and map stream info memory
mStreamInfoBuf = streamInfoBuf;
mStreamInfo = reinterpret_cast(mStreamInfoBuf->getPtr(0));
mNumBufs = minNumBuffers;
bufSize = mStreamInfoBuf->getSize(0);
if (BAD_INDEX != bufSize) {
rc = mCamOps->map_stream_buf(mCamHandle,
mChannelHandle, mHandle, CAM_MAPPING_BUF_TYPE_STREAM_INFO,
0, -1, mStreamInfoBuf->getFd(0), (uint32_t)bufSize);
if (rc < 0) {
ALOGE("Failed to map stream info buffer");
goto err1;
}
} else {
ALOGE("Failed to retrieve buffer size (bad index)");
goto err1;
}
// Calculate buffer size for deffered allocation
if (mDefferedAllocation) {
rc = calcOffset(mStreamInfo);
if (rc < 0) {
ALOGE("%s : Failed to calculate stream offset", __func__);
goto err1;
}
} else {
rc = configStream();
if (rc < 0) {
ALOGE("%s : Failed to config stream ", __func__);
goto err1;
}
}
mDataCB = stream_cb;
mUserData = userdata;
mDynBufAlloc = bDynallocBuf;
return 0;
err1:
mCamOps->delete_stream(mCamHandle, mChannelHandle, mHandle);
mHandle = 0;
mStreamInfoBuf = NULL;
mStreamInfo = NULL;
mNumBufs = 0;
done:
return rc;
}
mCamOps->add_stream,其具体的调用顺序是:
mm_camera_interface.c (mm_camera_intf_add_stream()) ->
mm_camera.c (mm_camera_add_stream()) ->
mm_camera_channel.c (mm_channel_fsm_fn()) ->
mm_channel_fsm_fn_stopped() -> mm_channel_add_stream()
接下来分析
hardware\qcom\camera\QCamera2\stack\mm-camera-interface\src\mm_camera_channel.c中的mm_channel_add_stream方法:
uint32_t mm_channel_add_stream(mm_channel_t *my_obj)
{
int32_t rc = 0;
uint8_t idx = 0;
uint32_t s_hdl = 0;
mm_stream_t *stream_obj = NULL;
CDBG("%s : E", __func__);
/* check available stream */
for (idx = 0; idx < MAX_STREAM_NUM_IN_BUNDLE; idx++) {
if (MM_STREAM_STATE_NOTUSED == my_obj->streams[idx].state) {
stream_obj = &my_obj->streams[idx];
break;
}
}
if (NULL == stream_obj) {
CDBG_ERROR("%s: streams reach max, no more stream allowed to add", __func__);
return s_hdl;
}
/* initialize stream object */
memset(stream_obj, 0, sizeof(mm_stream_t));
stream_obj->my_hdl = mm_camera_util_generate_handler(idx);
stream_obj->ch_obj = my_obj;
pthread_mutex_init(&stream_obj->buf_lock, NULL);
pthread_mutex_init(&stream_obj->cb_lock, NULL);
pthread_mutex_init(&stream_obj->cmd_lock, NULL);
stream_obj->state = MM_STREAM_STATE_INITED;
/* acquire stream */
rc = mm_stream_fsm_fn(stream_obj, MM_STREAM_EVT_ACQUIRE, NULL, NULL);
if (0 == rc) {
s_hdl = stream_obj->my_hdl;
} else {
/* error during acquire, de-init */
pthread_mutex_destroy(&stream_obj->buf_lock);
pthread_mutex_destroy(&stream_obj->cb_lock);
pthread_mutex_destroy(&stream_obj->cmd_lock);
memset(stream_obj, 0, sizeof(mm_stream_t));
}
CDBG("%s : stream handle = %d", __func__, s_hdl);
return s_hdl;
}
可以看出,此方法首先去确认可用的流,然后初始化流对象,最后调用mm_stream_fsm_fn
去获取流。
在mm_camera_stream.c首先初始化调用的是mm_stream_fsm_inited方法,然后操作video node,然后设置状态为MM_STREAM_STATE_ACQUIRED并调用mm_stream_fsm_acquired方法。
hardware\qcom\camera\QCamera2\stack\mm-camera-interface\src\mm_camera_stream.c
int32_t mm_stream_fsm_inited(mm_stream_t *my_obj,
mm_stream_evt_type_t evt,
void * in_val,
void * out_val)
{
int32_t rc = 0;
char dev_name[MM_CAMERA_DEV_NAME_LEN];
char t_devname[MM_CAMERA_DEV_NAME_LEN];
const char *temp_dev_name = NULL;
CDBG("%s: E, my_handle = 0x%x, fd = %d, state = %d",
__func__, my_obj->my_hdl, my_obj->fd, my_obj->state);
switch(evt) {
case MM_STREAM_EVT_ACQUIRE:
if ((NULL == my_obj->ch_obj) ||
((NULL != my_obj->ch_obj) && (NULL == my_obj->ch_obj->cam_obj))) {
CDBG_ERROR("%s: NULL channel or camera obj\n", __func__);
rc = -1;
break;
}
temp_dev_name = mm_camera_util_get_dev_name(my_obj->ch_obj->cam_obj->my_hdl);
if (temp_dev_name == NULL) {
CDBG_ERROR("%s: dev name is NULL",__func__);
rc = -1;
break;
}
strlcpy(t_devname, temp_dev_name, sizeof(t_devname));
snprintf(dev_name, sizeof(dev_name), "/dev/%s",t_devname );
my_obj->fd = open(dev_name, O_RDWR | O_NONBLOCK);
if (my_obj->fd <= 0) {
CDBG_ERROR("%s: open dev returned %d\n", __func__, my_obj->fd);
rc = -1;
break;
}
CDBG("%s: open dev fd = %d\n", __func__, my_obj->fd);
rc = mm_stream_set_ext_mode(my_obj);
if (0 == rc) {
my_obj->state = MM_STREAM_STATE_ACQUIRED;
} else {
/* failed setting ext_mode
* close fd */
close(my_obj->fd);
my_obj->fd = 0;
break;
}
break;
default:
CDBG_ERROR("%s: invalid state (%d) for evt (%d), in(%p), out(%p)",
__func__, my_obj->state, evt, in_val, out_val);
break;
}
return rc;
}
返回到QCameraStream::init方法中,继续调用了configStream()方法,去配置流的相关属性。
int32_t QCameraStream::configStream()
{
int rc = NO_ERROR;
// Configure the stream
mm_camera_stream_config_t stream_config;
stream_config.stream_info = mStreamInfo;
stream_config.mem_vtbl = mMemVtbl;
stream_config.stream_cb = dataNotifyCB;
stream_config.padding_info = mPaddingInfo;
stream_config.userdata = this;
rc = mCamOps->config_stream(mCamHandle,
mChannelHandle, mHandle, &stream_config);
return rc;
}
mm_camera_interface.c (mm_camera_intf_config_stream()) ->
mm_camera.c (mm_camera_config_stream()) ->
mm_camera_channel.c (mm_channel_config_stream()) ->
mm_camera_stream.c(mm_stream_fsm_acquired) ->
mm_stream_config()
在mm_stream_config()方法中,
int32_t mm_stream_config(mm_stream_t *my_obj,
mm_camera_stream_config_t *config)
{
int32_t rc = 0;
CDBG("%s: E, my_handle = 0x%x, fd = %d, state = %d",
__func__, my_obj->my_hdl, my_obj->fd, my_obj->state);
my_obj->stream_info = config->stream_info;
my_obj->buf_num = (uint8_t) config->stream_info->num_bufs;
my_obj->mem_vtbl = config->mem_vtbl;
my_obj->padding_info = config->padding_info;
/* cd through intf always palced at idx 0 of buf_cb */
my_obj->buf_cb[0].cb = config->stream_cb;
my_obj->buf_cb[0].user_data = config->userdata;
my_obj->buf_cb[0].cb_count = -1; /* infinite by default */
rc = mm_stream_sync_info(my_obj);
if (rc == 0) {
rc = mm_stream_set_fmt(my_obj);
}
return rc;
}
在此方法中,向kernel中发送sync请求,并且通过V4L2设置流的格式。
接下来分析start_preview的HAL流程。
在所有的preview的准备工作结束之后,到QCamera2HWI.cpp类的startPreview()方法中,
int QCamera2HardwareInterface::startPreview()
{
CDBG_HIGH("bluedai qcamera2hwi startPreview");
ATRACE_CALL();
int32_t rc = NO_ERROR;
CDBG_HIGH("%s: E", __func__);
updateThermalLevel(mThermalLevel);
// start preview stream
if (mParameters.isZSLMode() && mParameters.getRecordingHintValue() !=true) {
rc = startChannel(QCAMERA_CH_TYPE_ZSL);
} else {
rc = startChannel(QCAMERA_CH_TYPE_PREVIEW);
/*
CAF needs cancel auto focus to resume after snapshot.
Focus should be locked till take picture is done.
In Non-zsl case if focus mode is CAF then calling cancel auto focus
to resume CAF.
*/
cam_focus_mode_type focusMode = mParameters.getFocusMode();
if (focusMode == CAM_FOCUS_MODE_CONTINOUS_PICTURE)
mCameraHandle->ops->cancel_auto_focus(mCameraHandle->camera_handle);
}
#ifdef TARGET_TS_MAKEUP
if (mMakeUpBuf == NULL) {
int pre_width, pre_height;
mParameters.getPreviewSize(&pre_width, &pre_height);
mMakeUpBuf = new unsigned char[pre_width*pre_height*3/2];
CDBG_HIGH("prewidht=%d,preheight=%d",pre_width, pre_height);
}
#endif
CDBG_HIGH("%s: X", __func__);
return rc;
}
接着就调用了startChannel方法,在m_channels数组中取出对应的QCameraChannel对象,并且调用config()和start()方法。
int32_t QCamera2HardwareInterface::startChannel(qcamera_ch_type_enum_t ch_type)
{
int32_t rc = UNKNOWN_ERROR;
if (m_channels[ch_type] != NULL) {
rc = m_channels[ch_type]->config();
if (NO_ERROR == rc) {
rc = m_channels[ch_type]->start();
}
}
return rc;
}
在QCameraChannel的start方法中,
int32_t QCameraChannel::start()
{
int32_t rc = NO_ERROR;
if (mStreams.size() > 1) {
// there is more than one stream in the channel
// we need to notify mctl that all streams in this channel need to be bundled
cam_bundle_config_t bundleInfo;
memset(&bundleInfo, 0, sizeof(bundleInfo));
rc = m_camOps->get_bundle_info(m_camHandle, m_handle, &bundleInfo);
if (rc != NO_ERROR) {
ALOGE("%s: get_bundle_info failed", __func__);
return rc;
}
if (bundleInfo.num_of_streams > 1) {
for (int i = 0; i < bundleInfo.num_of_streams; i++) {
QCameraStream *pStream = getStreamByServerID(bundleInfo.stream_ids[i]);
if (pStream != NULL) {
if (pStream->isTypeOf(CAM_STREAM_TYPE_METADATA)) {
// Skip metadata for reprocess now because PP module cannot handle meta data
// May need furthur discussion if Imaginglib need meta data
continue;
}
cam_stream_parm_buffer_t param;
memset(¶m, 0, sizeof(cam_stream_parm_buffer_t));
param.type = CAM_STREAM_PARAM_TYPE_SET_BUNDLE_INFO;
param.bundleInfo = bundleInfo;
rc = pStream->setParameter(param);
if (rc != NO_ERROR) {
ALOGE("%s: stream setParameter for set bundle failed", __func__);
return rc;
}
}
}
}
}
for (size_t i = 0; i < mStreams.size(); i++) {
if ((mStreams[i] != NULL) &&
(m_handle == mStreams[i]->getChannelHandle())) {
mStreams[i]->start();
}
}
rc = m_camOps->start_channel(m_camHandle, m_handle);
if (rc != NO_ERROR) {
for (size_t i = 0; i < mStreams.size(); i++) {
if ((mStreams[i] != NULL) &&
(m_handle == mStreams[i]->getChannelHandle())) {
mStreams[i]->stop();
}
}
} else {
m_bIsActive = true;
for (size_t i = 0; i < mStreams.size(); i++) {
if (mStreams[i] != NULL) {
mStreams[i]->cond_signal();
}
}
}
return rc;
}
在start方法中,最主要的是两个,一个是调用了QCameraStream的start()方法,一个是调用了start_channel()方法。
首先看QCameraStream::start(),启动了主线程,处理流相关的操作。
int32_t QCameraStream::start()
{
int32_t rc = 0;
rc = mProcTh.launch(dataProcRoutine, this);
if (rc == NO_ERROR) {
m_bActive = true;
}
pthread_mutex_init(&m_lock, NULL);
pthread_cond_init(&m_cond, NULL);
return rc;
}
mm_camera_intf_start_channel() ->
mm_camera_start_channel() ->
mm_channel_fsm_fn_stopped() ->
mm_channel_start()
mm_channel_fsm_fn_active()
在start_channel()方法中,会继续调用到mm_camera_channel.c中的mm_channel_start方法。
int32_t mm_channel_start(mm_channel_t *my_obj)
{
int32_t rc = 0;
int i, j;
mm_stream_t *s_objs[MAX_STREAM_NUM_IN_BUNDLE] = {NULL};
uint8_t num_streams_to_start = 0;
mm_stream_t *s_obj = NULL;
int meta_stream_idx = 0;
cam_stream_type_t stream_type = CAM_STREAM_TYPE_DEFAULT;
for (i = 0; i < MAX_STREAM_NUM_IN_BUNDLE; i++) {
if (my_obj->streams[i].my_hdl > 0) {
s_obj = mm_channel_util_get_stream_by_handler(my_obj,
my_obj->streams[i].my_hdl);
if (NULL != s_obj) {
stream_type = s_obj->stream_info->stream_type;
/* remember meta data stream index */
if ((stream_type == CAM_STREAM_TYPE_METADATA) &&
(s_obj->ch_obj == my_obj)) {
meta_stream_idx = num_streams_to_start;
}
s_objs[num_streams_to_start++] = s_obj;
}
}
}
if (meta_stream_idx > 0 ) {
/* always start meta data stream first, so switch the stream object with the first one */
s_obj = s_objs[0];
s_objs[0] = s_objs[meta_stream_idx];
s_objs[meta_stream_idx] = s_obj;
}
if (NULL != my_obj->bundle.super_buf_notify_cb) {
/* need to send up cb, therefore launch thread */
/* init superbuf queue */
mm_channel_superbuf_queue_init(&my_obj->bundle.superbuf_queue);
my_obj->bundle.superbuf_queue.num_streams = num_streams_to_start;
my_obj->bundle.superbuf_queue.expected_frame_id = 0;
my_obj->bundle.superbuf_queue.expected_frame_id_without_led = 0;
for (i = 0; i < num_streams_to_start; i++) {
/* Only bundle streams that belong to the channel */
if(s_objs[i]->ch_obj == my_obj) {
/* set bundled flag to streams */
s_objs[i]->is_bundled = 1;
}
/* init bundled streams to invalid value -1 */
my_obj->bundle.superbuf_queue.bundled_streams[i] = s_objs[i]->my_hdl;
}
/* launch cb thread for dispatching super buf through cb */
snprintf(my_obj->cb_thread.threadName, THREAD_NAME_SIZE, "CAM_SuperBuf");
mm_camera_cmd_thread_launch(&my_obj->cb_thread,
mm_channel_dispatch_super_buf,
(void*)my_obj);
/* launch cmd thread for super buf dataCB */
snprintf(my_obj->cmd_thread.threadName, THREAD_NAME_SIZE, "CAM_SuperBufCB");
mm_camera_cmd_thread_launch(&my_obj->cmd_thread,
mm_channel_process_stream_buf,
(void*)my_obj);
/* set flag to TRUE */
my_obj->bundle.is_active = TRUE;
}
for (i = 0; i < num_streams_to_start; i++) {
/* stream that are linked to this channel should not be started */
if (s_objs[i]->ch_obj != my_obj) {
pthread_mutex_lock(&s_objs[i]->linked_stream->buf_lock);
s_objs[i]->linked_stream->linked_obj = my_obj;
s_objs[i]->linked_stream->is_linked = 1;
pthread_mutex_unlock(&s_objs[i]->linked_stream->buf_lock);
continue;
}
/* all streams within a channel should be started at the same time */
if (s_objs[i]->state == MM_STREAM_STATE_ACTIVE) {
CDBG_ERROR("%s: stream already started idx(%d)", __func__, i);
rc = -1;
break;
}
/* allocate buf */
rc = mm_stream_fsm_fn(s_objs[i],
MM_STREAM_EVT_GET_BUF,
NULL,
NULL);
if (0 != rc) {
CDBG_ERROR("%s: get buf failed at idx(%d)", __func__, i);
break;
}
/* reg buf */
rc = mm_stream_fsm_fn(s_objs[i],
MM_STREAM_EVT_REG_BUF,
NULL,
NULL);
if (0 != rc) {
CDBG_ERROR("%s: reg buf failed at idx(%d)", __func__, i);
break;
}
/* start stream */
rc = mm_stream_fsm_fn(s_objs[i],
MM_STREAM_EVT_START,
NULL,
NULL);
if (0 != rc) {
CDBG_ERROR("%s: start stream failed at idx(%d)", __func__, i);
break;
}
}
return rc;
}
可以看出,在此方法中,launch了super buf分发和streams流程的线程,之后调用mm_camera_stream.c里面处理stream的相关方法。
case MM_STREAM_EVT_START:
{
uint8_t has_cb = 0;
uint8_t i;
/* launch cmd thread if CB is not null */
pthread_mutex_lock(&my_obj->cb_lock);
for (i = 0; i < MM_CAMERA_STREAM_BUF_CB_MAX; i++) {
if(NULL != my_obj->buf_cb[i].cb) {
has_cb = 1;
break;
}
}
pthread_mutex_unlock(&my_obj->cb_lock);
pthread_mutex_lock(&my_obj->cmd_lock);
if (has_cb) {
snprintf(my_obj->cmd_thread.threadName, THREAD_NAME_SIZE, "CAM_StrmAppData");
mm_camera_cmd_thread_launch(&my_obj->cmd_thread,
mm_stream_dispatch_app_data,
(void *)my_obj);
}
pthread_mutex_unlock(&my_obj->cmd_lock);
my_obj->state = MM_STREAM_STATE_ACTIVE;
rc = mm_stream_streamon(my_obj);
if (0 != rc) {
/* failed stream on, need to release cmd thread if it's launched */
pthread_mutex_lock(&my_obj->cmd_lock);
if (has_cb) {
mm_camera_cmd_thread_release(&my_obj->cmd_thread);
}
pthread_mutex_unlock(&my_obj->cmd_lock);
my_obj->state = MM_STREAM_STATE_REG;
break;
}
}
break;
在此方法中,launch分发数据的线程,向kernel发送V4L2请求。
3.4 preview数据流
在上面分析的QCamera2HardwareInterface::addPreviewChannel()方法中,其中注册了preview_stream_cb_routine回调,此回调就是处理预览数据的。
rc = addStreamToChannel(pChannel, CAM_STREAM_TYPE_PREVIEW,
preview_stream_cb_routine, this);
preview_stream_cb_routine方法在
hardware\qcom\camera\QCamera2\HAL\QCamera2HWICallbacks.cpp中实现。
void QCamera2HardwareInterface::preview_stream_cb_routine(mm_camera_super_buf_t *super_frame,
QCameraStream * stream,
void *userdata)
{
ATRACE_CALL();
CDBG("[KPI Perf] %s : BEGIN", __func__);
int err = NO_ERROR;
QCamera2HardwareInterface *pme = (QCamera2HardwareInterface *)userdata;
QCameraGrallocMemory *memory = (QCameraGrallocMemory *)super_frame->bufs[0]->mem_info;
... ...
// Display the buffer.
CDBG("%p displayBuffer %d E", pme, idx);
int dequeuedIdx = memory->displayBuffer(idx);
if (dequeuedIdx < 0 || dequeuedIdx >= memory->getCnt()) {
CDBG_HIGH("%s: Invalid dequeued buffer index %d from display",
__func__, dequeuedIdx);
} else {
// Return dequeued buffer back to driver
err = stream->bufDone((uint32_t)dequeuedIdx);
if ( err < 0) {
ALOGE("stream bufDone failed %d", err);
}
}
// Handle preview data callback
if (pme->mDataCb != NULL &&
(pme->msgTypeEnabledWithLock(CAMERA_MSG_PREVIEW_FRAME) > 0)) {
int32_t rc = pme->sendPreviewCallback(stream, memory, idx);
if (NO_ERROR != rc) {
ALOGE("%s: Preview callback was not sent succesfully", __func__);
}
}
free(super_frame);
CDBG("[KPI Perf] %s : END", __func__);
return;
}
通过注释即可看出,对用在屏幕上投射的buffer和对上层应用去实现的data callback也做了相应处理。
callback主要有三种类型
notifyCallback
dataCallback
dataTimestampCallback
在之前分析client与server端相互连接时,在连接成功之后会返回一个new client,然后在client的构造函数中就对camera设置了notifyCallback ,dataCallback ,dataTimestampCallback三个回调,返回底层数据用于处理。
frameworks\av\services\camera\libcameraservice\api1\CameraClient.cpp
status_t CameraClient::initialize(CameraModule *module) {
int callingPid = getCallingPid();
status_t res;
LOG1("CameraClient::initialize E (pid %d, id %d)", callingPid, mCameraId);
// Verify ops permissions
res = startCameraOps();
if (res != OK) {
return res;
}
char camera_device_name[10];
snprintf(camera_device_name, sizeof(camera_device_name), "%d", mCameraId);
mHardware = new CameraHardwareInterface(camera_device_name);
res = mHardware->initialize(module);
if (res != OK) {
ALOGE("%s: Camera %d: unable to initialize device: %s (%d)",
__FUNCTION__, mCameraId, strerror(-res), res);
mHardware.clear();
return res;
}
mHardware->setCallbacks(notifyCallback,
dataCallback,
dataCallbackTimestamp,
(void *)(uintptr_t)mCameraId);
// Enable zoom, error, focus, and metadata messages by default
enableMsgType(CAMERA_MSG_ERROR | CAMERA_MSG_ZOOM | CAMERA_MSG_FOCUS |
CAMERA_MSG_PREVIEW_METADATA | CAMERA_MSG_FOCUS_MOVE);
LOG1("CameraClient::initialize X (pid %d, id %d)", callingPid, mCameraId);
return OK;
}
注册回调之后,需要到CameraClient中去找具体的实现。
void CameraClient::dataCallback(int32_t msgType,
const sp& dataPtr, camera_frame_metadata_t *metadata, void* user) {
LOG2("dataCallback(%d)", msgType);
sp client = static_cast(getClientFromCookie(user).get());
if (client.get() == nullptr) return;
if (!client->lockIfMessageWanted(msgType)) return;
if (dataPtr == 0 && metadata == NULL) {
ALOGE("Null data returned in data callback");
client->handleGenericNotify(CAMERA_MSG_ERROR, UNKNOWN_ERROR, 0);
return;
}
switch (msgType & ~CAMERA_MSG_PREVIEW_METADATA) {
case CAMERA_MSG_PREVIEW_FRAME:
client->handlePreviewData(msgType, dataPtr, metadata);
break;
case CAMERA_MSG_POSTVIEW_FRAME:
client->handlePostview(dataPtr);
break;
case CAMERA_MSG_RAW_IMAGE:
client->handleRawPicture(dataPtr);
break;
case CAMERA_MSG_COMPRESSED_IMAGE:
client->handleCompressedPicture(dataPtr);
break;
default:
client->handleGenericData(msgType, dataPtr, metadata);
break;
}
}
继续分析handlePreviewData方法。
void CameraClient::handlePreviewData(int32_t msgType,
const sp& mem,
camera_frame_metadata_t *metadata) {
ssize_t offset;
size_t size;
sp heap = mem->getMemory(&offset, &size);
// local copy of the callback flags
int flags = mPreviewCallbackFlag;
// is callback enabled?
if (!(flags & CAMERA_FRAME_CALLBACK_FLAG_ENABLE_MASK)) {
// If the enable bit is off, the copy-out and one-shot bits are ignored
LOG2("frame callback is disabled");
mLock.unlock();
return;
}
// hold a strong pointer to the client
sp c = mRemoteCallback;
// clear callback flags if no client or one-shot mode
if (c == 0 || (mPreviewCallbackFlag & CAMERA_FRAME_CALLBACK_FLAG_ONE_SHOT_MASK)) {
LOG2("Disable preview callback");
mPreviewCallbackFlag &= ~(CAMERA_FRAME_CALLBACK_FLAG_ONE_SHOT_MASK |
CAMERA_FRAME_CALLBACK_FLAG_COPY_OUT_MASK |
CAMERA_FRAME_CALLBACK_FLAG_ENABLE_MASK);
disableMsgType(CAMERA_MSG_PREVIEW_FRAME);
}
if (c != 0) {
// Is the received frame copied out or not?
if (flags & CAMERA_FRAME_CALLBACK_FLAG_COPY_OUT_MASK) {
LOG2("frame is copied");
copyFrameAndPostCopiedFrame(msgType, c, heap, offset, size, metadata);
} else {
LOG2("frame is forwarded");
mLock.unlock();
c->dataCallback(msgType, mem, metadata);
}
} else {
mLock.unlock();
}
}
copyFrameAndPostCopiedFrame方法就是两个buff区preview数据的投递。
void CameraClient::copyFrameAndPostCopiedFrame(
int32_t msgType, const sp& client,
const sp& heap, size_t offset, size_t size,
camera_frame_metadata_t *metadata) {
LOG2("copyFrameAndPostCopiedFrame");
// It is necessary to copy out of pmem before sending this to
// the callback. For efficiency, reuse the same MemoryHeapBase
// provided it's big enough. Don't allocate the memory or
// perform the copy if there's no callback.
// hold the preview lock while we grab a reference to the preview buffer
sp previewBuffer;
if (mPreviewBuffer == 0) {
mPreviewBuffer = new MemoryHeapBase(size, 0, NULL);
} else if (size > mPreviewBuffer->virtualSize()) {
mPreviewBuffer.clear();
mPreviewBuffer = new MemoryHeapBase(size, 0, NULL);
}
if (mPreviewBuffer == 0) {
ALOGE("failed to allocate space for preview buffer");
mLock.unlock();
return;
}
previewBuffer = mPreviewBuffer;
... ...
memcpy(previewBufferBase, (uint8_t *) heapBase + offset, size);
sp frame = new MemoryBase(previewBuffer, 0, size);
if (frame == 0) {
ALOGE("failed to allocate space for frame callback");
mLock.unlock();
return;
}
mLock.unlock();
client->dataCallback(msgType, frame, metadata);
}
将数据处理成frame,继续调用客户端client->dataCallback
frameworks\av\camera\Camera.cpp
void Camera::dataCallback(int32_t msgType, const sp& dataPtr,
camera_frame_metadata_t *metadata)
{
sp listener;
{
Mutex::Autolock _l(mLock);
listener = mListener;
}
if (listener != NULL) {
listener->postData(msgType, dataPtr, metadata);
}
}
通过listener的方式来往上层甩数据,此处的listener是在JNI中
static jint android_hardware_Camera_native_setup(JNIEnv *env, jobject thiz,
jobject weak_this, jint cameraId, jint halVersion, jstring clientPackageName)
{
... ...
// We use a weak reference so the Camera object can be garbage collected.
// The reference is only used as a proxy for callbacks.
sp context = new JNICameraContext(env, weak_this, clazz, camera);
context->incStrong((void*)android_hardware_Camera_native_setup);
camera->setListener(context);
... ...
}
继续之前的postData方法。
void JNICameraContext::postData(int32_t msgType, const sp& dataPtr,
camera_frame_metadata_t *metadata)
{
... ...
// return data based on callback type
switch (dataMsgType) {
case CAMERA_MSG_VIDEO_FRAME:
// should never happen
break;
// For backward-compatibility purpose, if there is no callback
// buffer for raw image, the callback returns null.
case CAMERA_MSG_RAW_IMAGE:
ALOGV("rawCallback");
if (mRawImageCallbackBuffers.isEmpty()) {
env->CallStaticVoidMethod(mCameraJClass, fields.post_event,
mCameraJObjectWeak, dataMsgType, 0, 0, NULL);
} else {
copyAndPost(env, dataPtr, dataMsgType);
}
break;
// There is no data.
case 0:
break;
default:
ALOGV("dataCallback(%d, %p)", dataMsgType, dataPtr.get());
copyAndPost(env, dataPtr, dataMsgType);
break;
}
... ...
}
继续走到copyAndPost方法。
void JNICameraContext::copyAndPost(JNIEnv* env, const sp& dataPtr, int msgType)
{
jbyteArray obj = NULL;
// allocate Java byte array and copy data
if (dataPtr != NULL) {
ssize_t offset;
size_t size;
sp heap = dataPtr->getMemory(&offset, &size);
ALOGV("copyAndPost: off=%zd, size=%zu", offset, size);
uint8_t *heapBase = (uint8_t*)heap->base();
if (heapBase != NULL) {
const jbyte* data = reinterpret_cast(heapBase + offset);
if (msgType == CAMERA_MSG_RAW_IMAGE) {
obj = getCallbackBuffer(env, &mRawImageCallbackBuffers, size);
} else if (msgType == CAMERA_MSG_PREVIEW_FRAME && mManualBufferMode) {
obj = getCallbackBuffer(env, &mCallbackBuffers, size);
if (mCallbackBuffers.isEmpty()) {
ALOGV("Out of buffers, clearing callback!");
mCamera->setPreviewCallbackFlags(CAMERA_FRAME_CALLBACK_FLAG_NOOP);
mManualCameraCallbackSet = false;
if (obj == NULL) {
return;
}
}
} else {
ALOGV("Allocating callback buffer");
obj = env->NewByteArray(size);
}
if (obj == NULL) {
ALOGE("Couldn't allocate byte array for JPEG data");
env->ExceptionClear();
} else {
env->SetByteArrayRegion(obj, 0, size, data);
}
} else {
ALOGE("image heap is NULL");
}
}
// post image data to Java
env->CallStaticVoidMethod(mCameraJClass, fields.post_event,
mCameraJObjectWeak, msgType, 0, 0, obj);
if (obj) {
env->DeleteLocalRef(obj);
}
}
先建立一个byte数组obj,将data缓存数据存储进obj数组,CallStaticVoidMethod是c调用java函数,最后执行是在Camera.java框架中的postEventFromNative方法中。
frameworks\base\core\java\android\hardware\Camera.java
private static void postEventFromNative(Object camera_ref,
int what, int arg1, int arg2, Object obj)
{
Camera c = (Camera)((WeakReference)camera_ref).get();
if (c == null)
return;
if (c.mEventHandler != null) {
Message m = c.mEventHandler.obtainMessage(what, arg1, arg2, obj);
c.mEventHandler.sendMessage(m);
}
}
然后通过handleMessage去处理接收到的消息。
public void handleMessage(Message msg) {
switch(msg.what) {
... ...
case CAMERA_MSG_PREVIEW_FRAME:
PreviewCallback pCb = mPreviewCallback;
if (pCb != null) {
if (mOneShot) {
// Clear the callback variable before the callback
// in case the app calls setPreviewCallback from
// the callback function
mPreviewCallback = null;
} else if (!mWithBuffer) {
// We're faking the camera preview mode to prevent
// the app from being flooded with preview frames.
// Set to oneshot mode again.
setHasPreviewCallback(true, false);
}
pCb.onPreviewFrame((byte[])msg.obj, mCamera);
}
return;
.... ....
至此,在camera.java中处理了数据的回调,并且在此handleMessage方法中也有对其他方法的回调,例如快门按键,拍照数据回调等。默认是没有previewcallback这个回调的,除非app层设置了setPreviewCallback,则可以将数据回调到上层。数据采集区与显示区两个缓存区的buff投递,是在HAL层进行处理的。
之后,在app层中,使用surfaceview去显示其preview数据即可,具体的实现在
frameworks\base\core\java\android\hardware\Camera.java中的setPreviewDisplay方法。此处的操作在之前所分析的初始化流程中也有体现,即在底层传入的surfaceview直接显示在显示区中的数据,而不用向上层去投递数据。