- AWS Lambda与RDS连接优化之旅
t0_54manong
编程问题解决手册aws云计算个人开发
在云计算的时代,AWSLambda与RDS的结合为开发者提供了高效且灵活的解决方案。然而,在实际应用中,我们常常会遇到一些性能瓶颈。本文将通过一个真实案例,探讨如何优化AWSLambda与RDS之间的连接,以提高API的响应速度。背景介绍最近,我们在AWS上部署了一个使用Dotnet6开发的API,它通过APIGateway暴露给外部,并连接到同VPC内的MySQLAuroraRDS数据库。部署前
- VINS-Mono 开源项目安装与使用指南
劳丽娓Fern
VINS-Mono开源项目安装与使用指南VINS-Mono项目地址:https://gitcode.com/gh_mirrors/vi/VINS-MonoVINS-Mono是一个专为单目视觉惯性系统设计的实时SLAM框架,旨在提供高精度的视觉惯性里程计。本指南将带你深入了解其目录结构、启动文件以及配置文件,帮助你快速上手并应用此项目。目录结构及介绍VINS-Mono的项目结构清晰地组织了不同的组件
- AWS 监控和管理服务 CloudWatch
wumingxiaoyao
BigDataaws大数据云计算CloudWatch日志监控
AWS监控和管理服务CloudWatch什么是CloudWatchCloudWatch工作原理CloudWatchlog收集方法通过AWSLambda发送日志到CloudWatchLogs使用CloudWatchLogsAgent发送日志通过AWSSDK或API将日志发送到CloudWatchLogs通过CloudWatchAgent将应用和系统日志发送到CloudWatchLogsCloudWa
- PHP云原生与Serverless架构深度实践
seopthonshentong
云原生phpserverless
在前六篇系列教程的基础上,本文将深入探讨PHP在云原生和Serverless环境下的高级应用,帮助开发者构建可扩展、高可用的现代化PHP应用。1.ServerlessPHP架构Bref与AWSLambda集成bash#安装Brefcomposerrequirebref/brefphpartisanvendor:publish--tag=serverless-configserverless.yml
- ROS的学习链接整理 (基于古月居)
辣椒炒月饼
学习机器人自动驾驶
机器人控制与仿真:http://wiki.ros.org/roscontrol机器人即使定位与地图建模:http://wiki.ros.org/gmappinghttp://wiki.ros.org/hectorslam机械臂相关学习:http://moveit.ros.org/斯坦福大学公开课———机器人学:https://www.bilibili.com/video/av4506104/交通大
- (02)Cartographer源码无死角解析-(72) 2D后端优化→OptimizationProblem2D-约束残差、landmark残差
江南才尽,年少无知!
机器人cartographerslam自动驾驶增强现实
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下:(02)Cartographer源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→
- cartographer官方指导文件说明---第3章 cartographer前端算法流程介绍
从小练武功
前端算法
cartographer官方指导文件说明第3章cartographer前端算法流程介绍3.1ScanMatch扫描匹配扫描匹配(ScanMatching)是Cartographer中实现局部SLAM的核心技术,它通过优化算法将当前激光扫描数据对齐到子图地图中。下面从计算过程、数学模型、参数配置等多个维度进行全面解析:3.1.1扫描匹配工作流程完整处理流程低置信度高置信度原始扫描数据运动畸变校正体素
- 3.3 里程计在SLAM中的应用
小慧1024
ROS1快速入门指南ros机器人linux
启动仿真环境roslaunchwpr_simulationwpb_corridor_hector.launch可视化结果如图所示在Riz建图中存在问题换一种方式建图roslaunchwpr_simulationwpb_corridor_gmapping.launch由于历程计的参与,地图被顺利建成
- SLAM面试笔记(5) — ROS面试
几度春风里
SLAM项目实战面试机器人ros自动驾驶
目录1ROS概述2ROS通信机制问题:服务通信概念问题:服务通信理论模型问题:参数服务器概念问题:参数服务器理论模型问题:参数服务器实现函数3ROS常用命令4常见面试题问题:roslaunch和rosrun区别?问题:什么是ROS?问题:ROS中的节点是什么?问题:ROS的消息通信机制是什么?问题:如何创建ROS的工作空间?问题:ROS中常用的机器人控制库有哪些?问题:ROS中如何进行机器人导航?
- nerf-slam论文复现
搬砖者(视觉算法工程师)
gitpython深度学习
nerf-slam实现三维重建详细的在我文档里面(有图片步骤)TableofContentsInstallDownloadDatasetsRunCitationLicenseAcknowledgmentsContactInstallClonerepowithsubmodules:gitclonehttps://github.com/ToniRV/NeRF-SLAM.git--recurse-sub
- STM32和树莓派的分工
⚙️修正版:典型硬件组合与通信流程(以移动机器人为例)1.硬件分工:大脑vs四肢角色硬件运行软件核心任务是否直接运行ROS决策大脑树莓派4B/JetsonNanoUbuntu+ROS运行SLAM、导航、视觉识别等复杂算法✅是实时四肢STM32F4FreeRTOS/裸机读取电机编码器、控制电机PWM❌否传感器/执行器电机、激光雷达、IMU-执行动作/采集数据-2.为什么需要STM32?树莓派无法直接
- 第5.4章 SLAM实战:使用std::chrono计算传感器消息时间戳
行知SLAM
机器人工程师带你入门SLAMunixc++自动驾驶人工智能
在机器人及自动驾驶定位中,传入的IMU和激光的消息都需要判断其数据的正确性,其中,主要会判断消息的开机时间和观测时间,其中开机时间主要通过调用chrono的函数计算,观测时间主要由GPS的时间来获得(GPS观测时间已由上篇文章总结GPS时间计算)。std::chrono是C++11引入的时间处理库,提供了高精度、类型安全且跨平台的时间计算功能。它主要包含三个核心概念:duration:表示时间间隔
- 《用Java 8新特性重构代码:让项目更简洁高效》
Tech_Jia_Hui
Java8新特性java重构开发语言
1.Lambda表达式:简化匿名内部类1.1传统方式vsLambda表达式1.2集合遍历对比1.3事件监听器简化2.StreamAPI:革命性的集合操作2.1基本Stream操作示例2.2数值流操作2.3分组和分区3.Optional:优雅处理null3.1基本Optional用法3.2Optional实践示例4.方法引用:更简洁的Lambda4.1四种方法引用类型4.2方法引用实践5.新的日期时
- 基于AWS无服务器架构的区块链API集成:零基础设施运维实践
AWS官方合作商
awsserverless架构web3区块链
引言区块链开发常面临节点部署、网络维护和扩展性挑战。本文将介绍如何通过AWS全托管服务构建高可用的区块链API层,无需自建节点、无需管理服务器,实现快速接入主流区块链网络(如以太坊、比特币),并保证企业级安全性与扩展性。graphLRA[前端应用]-->B[AmazonAPIGateway]B-->C[AWSLambda]C-->D[AmazonManagedBlockchain]C-->E[Bl
- 【SLAM】基于拓展卡尔曼滤波实现激光雷达传感器和角点提取的机器人定位附matlab代码
matlab科研社
机器人matlab数据结构
✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。往期回顾关注个人主页:Matlab科研工作室个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。内容介绍自主移动机器人定位是机器人学研究的核心问题之一。本文探讨了基于拓展卡尔曼滤波(EKF)融合激光雷达传感器数据和角点提取技术实现机器人定位的方法。通过深入分析激光雷达传感器的工
- 【ROS2】slam_toolbox建图详解
郭老二
ROSROS2SLAM
【ROS】郭老二博文之:ROS目录1、简介1)安装sudoaptinstallros-$ROS_DISTRO-slam-toolbox2)源码https://github.com/SteveMacenski/slam_toolbox3)官网https://joss.theoj.org/papers/10.21105/joss.027832、启动2.1启动slam_toolboxslam_toolb
- Python中日志输出配置
亚林瓜子
python开发语言logawslambdacloudwatchexception
问题在AWSlambdaPython中怎么样打印日志?Pythonimportlogginglogging.basicConfig()logging.getLogger("sqlalchemy.engine").setLevel(logging.INFO)logger=logging.getLogger()logger.setLevel(logging.INFO)上面是全局配置主要是如下配置:lo
- 视觉slam--框架
猿饵块
人工智能
视觉里程计的框架传感器VO--frontendVO的缺点后端--backend后端对什么数据进行优化利用什么数据进行优化的后端是怎么进行优化的回环检测建图建图是指构建地图的过程。构建的地图是点云地图还是什么信息的地图?建图并没有一个固定的形式和算法,地图的构建形式不是固定的,需要视SLAM的应用需求而定。
- 视觉slam十四讲实践部分记录——ch2、ch3
kikikidult
slam学习slamc++笔记
ch2一、使用g++编译.cpp为可执行文件并运行(P30)g++helloSLAM.cpp./a.out运行二、使用cmake编译mkdirbuildcdbuildcmake..makeCMakeCache.txt文件仍然指向旧的目录。这表明在源代码目录中可能还存在旧的CMakeCache.txt文件,或者在构建过程中仍然引用了旧的路径。我们需要彻底清理并重新开始。详细解决步骤步骤1:彻底清理源
- 【2D与3D SLAM中的扫描匹配算法全面解析】
Unpredictable222
SLAM算法自动驾驶自主导航算法opencvpclSLAMICPNDT
引言扫描匹配(ScanMatching)是同步定位与地图构建(SLAM)系统中的核心组件,它通过对齐连续的传感器观测数据来估计机器人的运动。本文将深入探讨2D和3DSLAM中的各种扫描匹配算法,包括数学原理、实现细节以及实际应用中的性能对比,特别关注激光雷达SLAM中的典型方法。一、扫描匹配数学基础与核心原理1.1刚体变换的数学表示扫描匹配的核心是求解刚体变换,在2D和3D空间中有不同的数学表示:
- cv::FileStorage用法
Feliz Da Vida
c++c++开发语言opencv
cv::FileStorage是OpenCV中的一个类,用于读取和写入结构化数据(如YAML、XML、JSON)。它非常适合保存和加载诸如:相机内参(K、D)位姿(R、T)IMU数据配置参数向量、矩阵、图像、列表等常见用途保存相机标定参数(标定后得到的.yml文件)配置文件读写(如SLAM、AR、CV项目)记录检测结果或轨迹数据使用示例✅1.写入YAML文件#includeusingnamespa
- 《视觉SLAM十四讲》自用笔记 第二讲:SLAM系统概述
BandieraRosa
slam笔记
在rm队伍里作为算法组梯队队员度过了一个赛季,为了促进和负责其他工作的算法组成员的交流,我决定在接下来的半个学期里(可能更快)读完这本书,并将其中的部分理论应用于我自制的雷达导航小车上。以下为第二讲的部分笔记:第二讲SLAM系统概述2.0目标1.理解一个视觉SLAM框架由哪几个模块组成,各模块的任务是什么。2.搭建编程环境,为开发和实验做准备2.1相机单目相机:只使用一个摄像头。无法通过单张照片获
- 【深度学习新浪潮】如何入门三维重建?
小米玄戒Andrew
深度学习新浪潮图像处理基石深度学习人工智能图像处理计算机视觉python视觉几何opencv
入门三维重建算法技术需要结合数学基础、计算机视觉理论、编程实践和项目经验,以下是系统的学习路径和建议:一、基础知识储备1.数学基础线性代数:矩阵运算、向量空间、特征分解(用于相机矩阵、变换矩阵推导)。几何基础:三维几何(点、线、面的表示)、射影几何(单应矩阵、本质矩阵、基础矩阵)、李群与李代数(SLAM中的位姿优化)。概率与统计:贝叶斯估计、概率图模型(SLAM中的状态估计)、随机过程(滤波算法如
- Levenberg-Marquardt算法详解和C++代码示例
点云SLAM
算法算法非线性最小二乘问题高斯-牛顿法和梯度下降法LM算法数值优化计算机视觉SLAM后端优化
Levenberg-Marquardt(LM)算法是非线性最小二乘问题中常用的一种优化算法,它融合了高斯-牛顿法和梯度下降法的优点,在数值计算与SLAM、图像配准、机器学习等领域中应用广泛。一、Levenberg-Marquardt算法基本原理1.1问题定义我们希望最小化一个非线性残差平方和目标函数:minx f(x)=12∑i=1mri(x)2=12∥r(x)∥2\min_{\mathbf{x
- 基于Serverless架构的搜索引擎爬虫实现方案
搜索引擎技术
搜索引擎实战serverless架构搜索引擎ai
基于Serverless架构的搜索引擎爬虫实现方案关键词:Serverless架构、搜索引擎爬虫、无服务器计算、分布式爬虫、AWSLambda、事件驱动架构、网页抓取摘要:本文深入探讨了如何利用Serverless架构实现高效、可扩展的搜索引擎爬虫系统。我们将从传统爬虫的局限性出发,分析Serverless架构的优势,详细讲解基于事件驱动的爬虫设计原理,并提供完整的实现方案和代码示例。文章将覆盖核
- 推荐文章:Lambda Serverless Search - 构建低成本高效全文搜索引擎
赵鹰伟Meadow
推荐文章:LambdaServerlessSearch-构建低成本高效全文搜索引擎Lambda-Serverless-SearchUseAWSLambdatoperformfree-textsearchondocuments-WithSAMTemplate项目地址:https://gitcode.com/gh_mirrors/la/Lambda-Serverless-Search在当今快速发展的云
- 自动驾驶转具身智能的切入点有哪些?
自动驾驶之心
自动驾驶人工智能机器学习
这几天很多同学后台私信我们,自动驾驶如何转具身智能?会不会有比较大的gap。从算法维度上看,具身智能领域基本延续了机器人和自驾的一些算法,比如SLAM、规划控制、模型训练与微调方式、数据生成方式、大模型。当然也有很多具体的任务不太一样,比如数据采集方式、重执行硬件与结构。我们也创办了一个具身智能全栈学习社区:具身智能之心,平时分享了很多具身智能相关的算法、数据采集、软硬件方案等。主要方向涉及VLA
- 相机成像原理_键盘摄影(一)——相机成像基本元件
weixin_39620273
相机成像原理
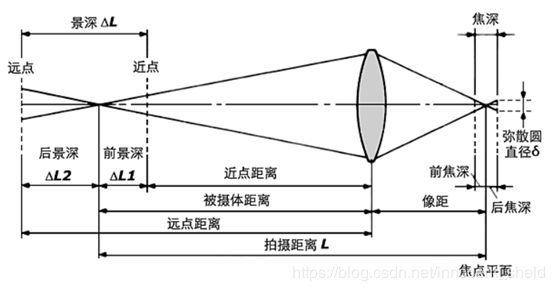
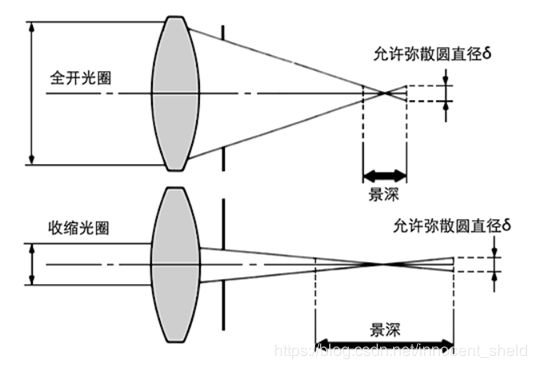
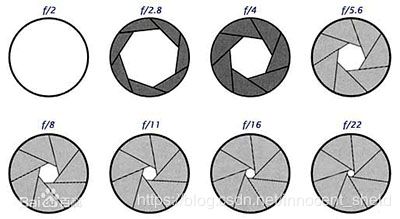
写在前面笔者在就读本科期间,开始接触计算机视觉领域,主要包括传统的图像处理,研究生期间开始了解深度学习,三维重建和SLAM(同时定位和建图)。可是对于其中使用到的最重要的传感器,相机,它的成像原理知之甚少,照片是怎么成像的?有幸在工作之余玩起了胶片相机,学习了一些摄影知识,在此和大家分享相关知识,欢迎友好地指正和勘误,轻喷。随着器件的发展,目前的相机类型丰富,我们可以从基本的元件讲起,主要涉及到胶
- 【视觉SLAM基础(二):特征点提取与匹配】
Unpredictable222
SLAM算法算法自动驾驶ubuntuc++笔记opencv
前言在视觉SLAM中,特征点是连接连续图像帧的桥梁,是视觉里程计的核心。本文将详细介绍特征点的提取与匹配方法,以及如何利用这些特征点估计相机运动。原理部分只是简单介绍,详细的介绍大家可以去看高翔老师的《视觉SLAM十四讲》。1.特征点提取1.1特征点基本概念一个好的图像特征应该具有:可重复性:在不同图像中能被重复检测到可区分性:不同特征有显著区别高效性:计算复杂度低局部性:对遮挡、光照变化等鲁棒1
- 科研论文术语全解析:彻底搞懂什么是Baseline、Pipeline..........等内容【2025最新版!!!】
那就举个栗子!
计算机视觉解决方案人工智能
引言在撰写科研论文的过程中,尤其是在计算机视觉、机器人、SLAM以及三维重建等领域,准确理解并使用核心术语对于展示研究的科学性、系统性具有至关重要的作用。术语不仅是论文结构的骨架,也是向同行传达研究设计与创新思路的重要桥梁。本文旨在从实际科研写作的角度,系统性分析高频科研术语的定义与应用,帮助初学者准确理解其含义,掌握其写作位置与逻辑,最后以SLAM与3D高斯泼溅(3DGaussianSplatt
- 算法 单链的创建与删除
换个号韩国红果果
c算法
先创建结构体
struct student {
int data;
//int tag;//标记这是第几个
struct student *next;
};
// addone 用于将一个数插入已从小到大排好序的链中
struct student *addone(struct student *h,int x){
if(h==NULL) //??????
- 《大型网站系统与Java中间件实践》第2章读后感
白糖_
java中间件
断断续续花了两天时间试读了《大型网站系统与Java中间件实践》的第2章,这章总述了从一个小型单机构建的网站发展到大型网站的演化过程---整个过程会遇到很多困难,但每一个屏障都会有解决方案,最终就是依靠这些个解决方案汇聚到一起组成了一个健壮稳定高效的大型系统。
看完整章内容,
- zeus持久层spring事务单元测试
deng520159
javaDAOspringjdbc
今天把zeus事务单元测试放出来,让大家指出他的毛病,
1.ZeusTransactionTest.java 单元测试
package com.dengliang.zeus.webdemo.test;
import java.util.ArrayList;
import java.util.List;
import org.junit.Test;
import
- Rss 订阅 开发
周凡杨
htmlxml订阅rss规范
RSS是 Really Simple Syndication的缩写(对rss2.0而言,是这三个词的缩写,对rss1.0而言则是RDF Site Summary的缩写,1.0与2.0走的是两个体系)。
RSS
- 分页查询实现
g21121
分页查询
在查询列表时我们常常会用到分页,分页的好处就是减少数据交换,每次查询一定数量减少数据库压力等等。
按实现形式分前台分页和服务器分页:
前台分页就是一次查询出所有记录,在页面中用js进行虚拟分页,这种形式在数据量较小时优势比较明显,一次加载就不必再访问服务器了,但当数据量较大时会对页面造成压力,传输速度也会大幅下降。
服务器分页就是每次请求相同数量记录,按一定规则排序,每次取一定序号直接的数据
- spring jms异步消息处理
510888780
jms
spring JMS对于异步消息处理基本上只需配置下就能进行高效的处理。其核心就是消息侦听器容器,常用的类就是DefaultMessageListenerContainer。该容器可配置侦听器的并发数量,以及配合MessageListenerAdapter使用消息驱动POJO进行消息处理。且消息驱动POJO是放入TaskExecutor中进行处理,进一步提高性能,减少侦听器的阻塞。具体配置如下:
- highCharts柱状图
布衣凌宇
hightCharts柱图
第一步:导入 exporting.js,grid.js,highcharts.js;第二步:写controller
@Controller@RequestMapping(value="${adminPath}/statistick")public class StatistickController { private UserServi
- 我的spring学习笔记2-IoC(反向控制 依赖注入)
aijuans
springmvcSpring 教程spring3 教程Spring 入门
IoC(反向控制 依赖注入)这是Spring提出来了,这也是Spring一大特色。这里我不用多说,我们看Spring教程就可以了解。当然我们不用Spring也可以用IoC,下面我将介绍不用Spring的IoC。
IoC不是框架,她是java的技术,如今大多数轻量级的容器都会用到IoC技术。这里我就用一个例子来说明:
如:程序中有 Mysql.calss 、Oracle.class 、SqlSe
- TLS java简单实现
antlove
javasslkeystoretlssecure
1. SSLServer.java
package ssl;
import java.io.FileInputStream;
import java.io.InputStream;
import java.net.ServerSocket;
import java.net.Socket;
import java.security.KeyStore;
import
- Zip解压压缩文件
百合不是茶
Zip格式解压Zip流的使用文件解压
ZIP文件的解压缩实质上就是从输入流中读取数据。Java.util.zip包提供了类ZipInputStream来读取ZIP文件,下面的代码段创建了一个输入流来读取ZIP格式的文件;
ZipInputStream in = new ZipInputStream(new FileInputStream(zipFileName));
&n
- underscore.js 学习(一)
bijian1013
JavaScriptunderscore
工作中需要用到underscore.js,发现这是一个包括了很多基本功能函数的js库,里面有很多实用的函数。而且它没有扩展 javascript的原生对象。主要涉及对Collection、Object、Array、Function的操作。 学
- java jvm常用命令工具——jstatd命令(Java Statistics Monitoring Daemon)
bijian1013
javajvmjstatd
1.介绍
jstatd是一个基于RMI(Remove Method Invocation)的服务程序,它用于监控基于HotSpot的JVM中资源的创建及销毁,并且提供了一个远程接口允许远程的监控工具连接到本地的JVM执行命令。
jstatd是基于RMI的,所以在运行jstatd的服务
- 【Spring框架三】Spring常用注解之Transactional
bit1129
transactional
Spring可以通过注解@Transactional来为业务逻辑层的方法(调用DAO完成持久化动作)添加事务能力,如下是@Transactional注解的定义:
/*
* Copyright 2002-2010 the original author or authors.
*
* Licensed under the Apache License, Version
- 我(程序员)的前进方向
bitray
程序员
作为一个普通的程序员,我一直游走在java语言中,java也确实让我有了很多的体会.不过随着学习的深入,java语言的新技术产生的越来越多,从最初期的javase,我逐渐开始转变到ssh,ssi,这种主流的码农,.过了几天为了解决新问题,webservice的大旗也被我祭出来了,又过了些日子jms架构的activemq也开始必须学习了.再后来开始了一系列技术学习,osgi,restful.....
- nginx lua开发经验总结
ronin47
使用nginx lua已经两三个月了,项目接开发完毕了,这几天准备上线并且跟高德地图对接。回顾下来lua在项目中占得必中还是比较大的,跟PHP的占比差不多持平了,因此在开发中遇到一些问题备忘一下 1:content_by_lua中代码容量有限制,一般不要写太多代码,正常编写代码一般在100行左右(具体容量没有细心测哈哈,在4kb左右),如果超出了则重启nginx的时候会报 too long pa
- java-66-用递归颠倒一个栈。例如输入栈{1,2,3,4,5},1在栈顶。颠倒之后的栈为{5,4,3,2,1},5处在栈顶
bylijinnan
java
import java.util.Stack;
public class ReverseStackRecursive {
/**
* Q 66.颠倒栈。
* 题目:用递归颠倒一个栈。例如输入栈{1,2,3,4,5},1在栈顶。
* 颠倒之后的栈为{5,4,3,2,1},5处在栈顶。
*1. Pop the top element
*2. Revers
- 正确理解Linux内存占用过高的问题
cfyme
linux
Linux开机后,使用top命令查看,4G物理内存发现已使用的多大3.2G,占用率高达80%以上:
Mem: 3889836k total, 3341868k used, 547968k free, 286044k buffers
Swap: 6127608k total,&nb
- [JWFD开源工作流]当前流程引擎设计的一个急需解决的问题
comsci
工作流
当我们的流程引擎进入IRC阶段的时候,当循环反馈模型出现之后,每次循环都会导致一大堆节点内存数据残留在系统内存中,循环的次数越多,这些残留数据将导致系统内存溢出,并使得引擎崩溃。。。。。。
而解决办法就是利用汇编语言或者其它系统编程语言,在引擎运行时,把这些残留数据清除掉。
- 自定义类的equals函数
dai_lm
equals
仅作笔记使用
public class VectorQueue {
private final Vector<VectorItem> queue;
private class VectorItem {
private final Object item;
private final int quantity;
public VectorI
- Linux下安装R语言
datageek
R语言 linux
命令如下:sudo gedit /etc/apt/sources.list1、deb http://mirrors.ustc.edu.cn/CRAN/bin/linux/ubuntu/ precise/ 2、deb http://dk.archive.ubuntu.com/ubuntu hardy universesudo apt-key adv --keyserver ke
- 如何修改mysql 并发数(连接数)最大值
dcj3sjt126com
mysql
MySQL的连接数最大值跟MySQL没关系,主要看系统和业务逻辑了
方法一:进入MYSQL安装目录 打开MYSQL配置文件 my.ini 或 my.cnf查找 max_connections=100 修改为 max_connections=1000 服务里重起MYSQL即可
方法二:MySQL的最大连接数默认是100客户端登录:mysql -uusername -ppass
- 单一功能原则
dcj3sjt126com
面向对象的程序设计软件设计编程原则
单一功能原则[
编辑]
SOLID 原则
单一功能原则
开闭原则
Liskov代换原则
接口隔离原则
依赖反转原则
查
论
编
在面向对象编程领域中,单一功能原则(Single responsibility principle)规定每个类都应该有
- POJO、VO和JavaBean区别和联系
fanmingxing
VOPOJOjavabean
POJO和JavaBean是我们常见的两个关键字,一般容易混淆,POJO全称是Plain Ordinary Java Object / Plain Old Java Object,中文可以翻译成:普通Java类,具有一部分getter/setter方法的那种类就可以称作POJO,但是JavaBean则比POJO复杂很多,JavaBean是一种组件技术,就好像你做了一个扳子,而这个扳子会在很多地方被
- SpringSecurity3.X--LDAP:AD配置
hanqunfeng
SpringSecurity
前面介绍过基于本地数据库验证的方式,参考http://hanqunfeng.iteye.com/blog/1155226,这里说一下如何修改为使用AD进行身份验证【只对用户名和密码进行验证,权限依旧存储在本地数据库中】。
将配置文件中的如下部分删除:
<!-- 认证管理器,使用自定义的UserDetailsService,并对密码采用md5加密-->
- mac mysql 修改密码
IXHONG
mysql
$ sudo /usr/local/mysql/bin/mysqld_safe –user=root & //启动MySQL(也可以通过偏好设置面板来启动)$ sudo /usr/local/mysql/bin/mysqladmin -uroot password yourpassword //设置MySQL密码(注意,这是第一次MySQL密码为空的时候的设置命令,如果是修改密码,还需在-
- 设计模式--抽象工厂模式
kerryg
设计模式
抽象工厂模式:
工厂模式有一个问题就是,类的创建依赖于工厂类,也就是说,如果想要拓展程序,必须对工厂类进行修改,这违背了闭包原则。我们采用抽象工厂模式,创建多个工厂类,这样一旦需要增加新的功能,直接增加新的工厂类就可以了,不需要修改之前的代码。
总结:这个模式的好处就是,如果想增加一个功能,就需要做一个实现类,
- 评"高中女生军训期跳楼”
nannan408
首先,先抛出我的观点,各位看官少点砖头。那就是,中国的差异化教育必须做起来。
孔圣人有云:有教无类。不同类型的人,都应该有对应的教育方法。目前中国的一体化教育,不知道已经扼杀了多少创造性人才。我们出不了爱迪生,出不了爱因斯坦,很大原因,是我们的培养思路错了,我们是第一要“顺从”。如果不顺从,我们的学校,就会用各种方法,罚站,罚写作业,各种罚。军
- scala如何读取和写入文件内容?
qindongliang1922
javajvmscala
直接看如下代码:
package file
import java.io.RandomAccessFile
import java.nio.charset.Charset
import scala.io.Source
import scala.reflect.io.{File, Path}
/**
* Created by qindongliang on 2015/
- C语言算法之百元买百鸡
qiufeihu
c算法
中国古代数学家张丘建在他的《算经》中提出了一个著名的“百钱买百鸡问题”,鸡翁一,值钱五,鸡母一,值钱三,鸡雏三,值钱一,百钱买百鸡,问翁,母,雏各几何?
代码如下:
#include <stdio.h>
int main()
{
int cock,hen,chick; /*定义变量为基本整型*/
for(coc
- Hadoop集群安全性:Hadoop中Namenode单点故障的解决方案及详细介绍AvatarNode
wyz2009107220
NameNode
正如大家所知,NameNode在Hadoop系统中存在单点故障问题,这个对于标榜高可用性的Hadoop来说一直是个软肋。本文讨论一下为了解决这个问题而存在的几个solution。
1. Secondary NameNode
原理:Secondary NN会定期的从NN中读取editlog,与自己存储的Image进行合并形成新的metadata image
优点:Hadoop较早的版本都自带,