ROS机器人---创建编译并运行完整的ros helloword工程(c++版)
ROS机器人---创建编译并运行完整的ros helloword工程(c++版)
- 注意
- 一、创建工作空间
- 二、创建软件包(project)
- 三、使用CLion IDE 软件开发 (本工程可以不需要)
- 3.1 打开工程
- 3.2 编写talker.cpp 创建消息发布器节点 (发布话题)
- 3.3 编写listener.cpp 创建消息接收器节点 (订阅话题)
- 3.4 编写CMakeLists.txt
- 3.5 编译
- 四、运行此工程
- 4.1 运行 ros master
- 4.2 运行 talker
- 4.3 运行 listener
注意
系统:Ubuntu16.04 LST
ros版本:kinetic
一、创建工作空间
在home目录下创建名称为ros_test_ws 的工作空间
mkdir -p ros_test_ws/src #新建ros_test_ws/src 目录
cd ros_test_ws/src
catkin_init_workspace
cd .. #退到 ros_test_ws 路径下
catkin_make #编译
source devel/setup.bash #配置暂时的环境变量
echo $ROS_PACKAGE_PATH # 查看刚刚配置的环境变量是否生效
ros package 路径包含有刚刚创建的工作空间目录
![]()
二、创建软件包(project)
创建名称为 my_ros_helloworld_cpluse 的软件包
cd catkin_ws/src # 进入工作空间下的 src 目录 (注意路径!!!)
catkin_create_pkg my_ros_helloworld_cpluse std_msgs rospy roscpp
cd .. #退到 catkin_ws 工作空间路径下
catkin_make #编译软件包
三、使用CLion IDE 软件开发 (本工程可以不需要)
使用CLion IDE 便于后续的大型开发
3.1 打开工程
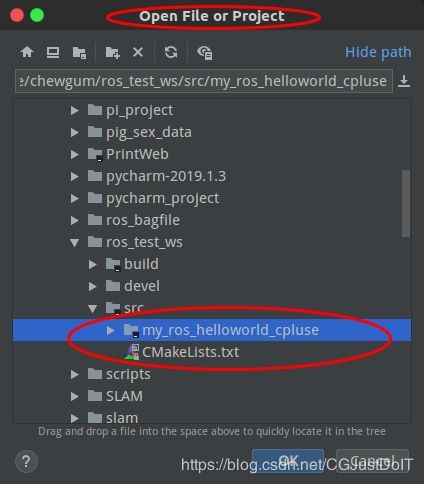
忽略如下错误 (编译是需要进入 ros_test_ws/src目录下进行 catkin_make 编译的)

3.2 编写talker.cpp 创建消息发布器节点 (发布话题)
创建src/talker.cpp 文件
#include 3.3 编写listener.cpp 创建消息接收器节点 (订阅话题)
创建src/listener.cpp 文件
#include 3.4 编写CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(my_ros_helloworld_cpluse)
## Find catkin and any catkin packages
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs genmsg)
## Declare a catkin package
catkin_package()
## 编译 talker and listener
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(listener
src/listener.cpp
)
target_link_libraries(listener ${catkin_LIBRARIES})
add_executable(talker
src/talker.cpp
)
target_link_libraries(talker ${catkin_LIBRARIES})
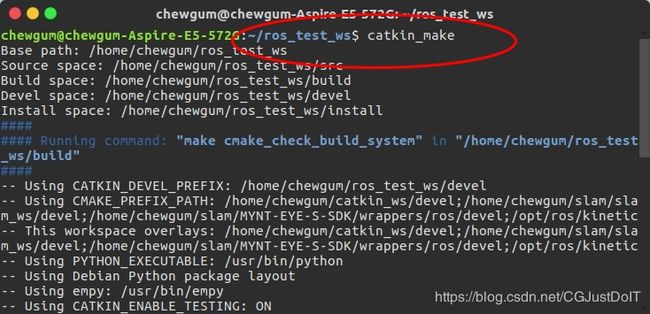
3.5 编译
在ros_test_ws 目录下 运行 catkin_make 命令编译,生成可执行文件 talker 以及 listener
四、运行此工程
注意:用echo $ROS_PACKAGE_PATH 查看此工作空间是否在环境变量中
若没有则运行此命令 source ~/ros_test_ws/devel/setup.bash 也可以通过 直接将此命令写入 home目录下的 .bashrc文件中,这样就不需要每次都source ~/ros_test_ws/devel/setup.bash 。因为每打开一个新的终端,都会先加载 .bashrc文件。
确保环境变量加载正确,否则rosrun 找不到 软件包 !!!
开三个终端,分别运行如下命令:
4.1 运行 ros master
先运行命令 roscore
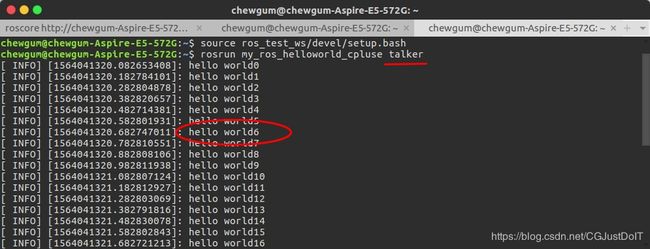
4.2 运行 talker
source ros_test_ws/devel/setup.bash
rosrun my_ros_helloworld_cpluse talker
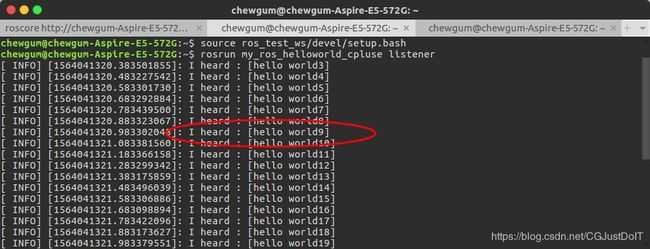
4.3 运行 listener
source ros_test_ws/devel/setup.bash
rosrun my_ros_helloworld_cpluse listener