从入门到深入卷积神经网络学习分享(关于对Pytorch的MNIST手写字母的识别)
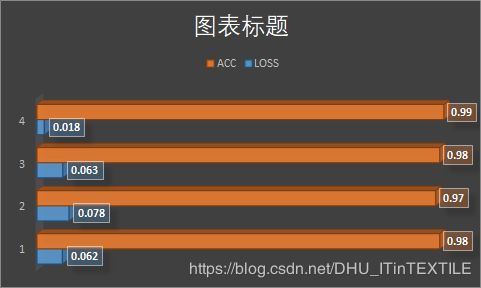
笔者采用4种网络层次结构来实现关于MNIST手写字母识别的神经网络,从表层开始步步深入,便于理解。
四种网络分别是:
一:3层全连接网络模型(包含批处理化以及ReLU优化函数)
(layer1): Sequential(
(0): Linear(in_features=784, out_features=300, bias=True)
(1): BatchNorm1d(300, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(layer2): Sequential(
(0): Linear(in_features=300, out_features=100, bias=True)
(1): BatchNorm1d(100, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(layer3): Sequential(
(0): Linear(in_features=100, out_features=10, bias=True)
)
二:2层卷积神经网络和3层全连接输出(无批处理化有ReLU优化函数)
(此2层卷积转载来自其他作者,如侵必删)
self.conv1 = nn.Sequential( #input_size=(1*28*28)
nn.Conv2d(1, 6, 5, 1, 2), #padding=2保证输入输出尺寸相同
nn.ReLU(), #input_size=(6*28*28)
nn.MaxPool2d(kernel_size=2, stride=2),#output_size=(6*14*14)
)
self.conv2 = nn.Sequential(
nn.Conv2d(6, 16, 5),
nn.ReLU(), #input_size=(16*10*10)
nn.MaxPool2d(2, 2) #output_size=(16*5*5)
)
self.fc1 = nn.Sequential(
nn.Linear(16 * 5 * 5, 120),
nn.ReLU()
)
self.fc2 = nn.Sequential(
nn.Linear(120, 84),
nn.ReLU()
)
self.fc3 = nn.Linear(84, 10)
三:4层卷积神经网络和3层全连接输出(无批处理化有ReLU函数优化)
CNN(
(layer1): Sequential(
(0): Conv2d(1, 16, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU(inplace=True)
)
(layer2): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer3): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU(inplace=True)
)
(layer4): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): Linear(in_features=2048, out_features=1024, bias=True)
(1): ReLU(inplace=True)
(2): Linear(in_features=1024, out_features=128, bias=True)
(3): ReLU(inplace=True)
(4): Linear(in_features=128, out_features=10, bias=True)
)
)测试集正确率明显有很大提升,函数收敛速度加快几倍,笔者会在最后附上正确率对比
四:4层卷积神经网络和3层全连接输出(有批处理化有ReLU函数优化)—最优
(layer1): Sequential(
(0): Conv2d(1, 16, kernel_size=(3, 3), stride=(1, 1))
(1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(layer2): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1))
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer3): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(layer4): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1))
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): Linear(in_features=2048, out_features=1024, bias=True)
(1): ReLU(inplace=True)
(2): Linear(in_features=1024, out_features=128, bias=True)
(3): ReLU(inplace=True)
(4): Linear(in_features=128, out_features=10, bias=True)
)上述第4种模型采用卷积层-批处理化-ReLU优化-池化层 这种顺序搭建
第一种3层全连接模型采用20次训练结果,其他模型采用8次训练,因为第一种模型如果采用8次训练,结果并未收敛无参考价值
最后笔者列出第第四种4层卷积包含批处理化模型全部代码,供参考学习
CNN2_Net.py
import torch
from torch import nn, optim
from torch.autograd import Variable
from torch.utils.data import DataLoader
from torchvision import datasets, transforms
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=3), nn.BatchNorm2d(16), nn.ReLU(True))
self.layer2 = nn.Sequential(
nn.Conv2d(16, 32, kernel_size=3), nn.BatchNorm2d(32), nn.ReLU(True), nn.MaxPool2d(2, 2))
self.layer3 = nn.Sequential(
nn.Conv2d(32, 64, kernel_size=3), nn.BatchNorm2d(64), nn.ReLU(True))
self.layer4 = nn.Sequential(
nn.Conv2d(64, 128, kernel_size=3), nn.BatchNorm2d(128), nn.ReLU(True), nn.MaxPool2d(2, 2))
self.fc = nn.Sequential(
nn.Linear(128 * 4 * 4, 1024), nn.ReLU(inplace=True), nn.Linear(1024, 128), nn.ReLU(inplace=True),
nn.Linear(128, 10))
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
main.py
import torch
import torchvision as tv
import torchvision.transforms as transforms
import torch.nn as nn
import torch.optim as optim
import CNN2_Net
# 超参数设置
EPOCH = 8 # 遍历数据集次数
BATCH_SIZE = 64 # 批处理尺寸(batch_size)
LR = 0.001 # 学习率
# 定义数据预处理方式
transform = transforms.ToTensor()
# 定义训练数据集
trainset = tv.datasets.MNIST(
root='./data/',
train=True,
download=True,
transform=transform)
# 定义训练批处理数据
trainloader = torch.utils.data.DataLoader(
trainset,
batch_size=BATCH_SIZE,
shuffle=True,
)
# 定义测试数据集
testset = tv.datasets.MNIST(
root='./data/',
train=False,
download=True,
transform=transform)
# 定义测试批处理数据
testloader = torch.utils.data.DataLoader(
testset,
batch_size=BATCH_SIZE,
shuffle=False,
)
# 定义损失函数loss function 和优化方式(采用SGD)
net = CNN2_Net.CNN()
criterion = nn.CrossEntropyLoss() # 交叉熵损失函数,通常用于多分类问题上
optimizer = optim.SGD(net.parameters(), lr=LR, momentum=0.9)
# 训练
if __name__ == "__main__":
for epoch in range(EPOCH):
sum_loss = 0.0
Total_sum_loss = 0.0
# 数据读取
for i, data in enumerate(trainloader):
inputs, labels = data
# inputs, labels = inputs.to(device), labels.to(device)
# 梯度清零
optimizer.zero_grad()
# forward + backward
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# 每训练100个batch打印一次平均loss
sum_loss += loss.item()
Total_sum_loss += loss.item()
if i % 100 == 99:
print('[%d, %d] loss: %.03f'
% (epoch + 1, i + 1, sum_loss / 100))
sum_loss = 0.0
print('[%d] Total_loss: %.03f' % (epoch + 1, Total_sum_loss / len(trainloader)))
# 每跑完一次epoch测试一下准确率
with torch.no_grad():
correct = 0
total = 0
i = 0
for data in testloader:
images, labels = data
# images, labels = images.to(device), labels.to(device)
outputs = net(images)
# 取得分最高的那个类
_, predicted = torch.max(outputs.data, 1) # 选择概率最大的那个类别
total += labels.size(0)
i += 1
correct += (predicted == labels).sum()
print(labels.size(0))
print('第%d个epoch的识别准确率为:%d%%' % (epoch + 1, (100 * correct / total)))
大家可以在下方留言