Android7.0 PowerManagerService(1) 启动过程
PowerManagerService负责Android系统中电源管理方面的工作,为了简便我们在下文中将其简称为PMS。
我们先大致了解一下PMS在Android中的整体结构:
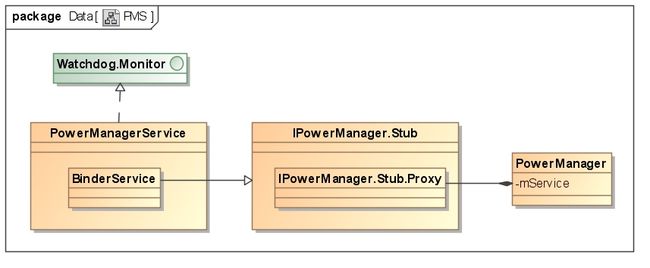
如上图所示,可以看出PMS的对外接口是PowerManager,其通过Binder通信来调用PMS中定义的BinderService的接口。
BinderService与PowerManger之间的通信接口由IPowerManager.aidl来进行约束。
PMS由SystemServer来启动,我们看看SystemServer.java中相关的代码:
private void startBootstrapServices() {
..........
mPowerManagerService = mSystemServiceManager.startService(PowerManagerService.class);
..........
}
private void startOtherServices() {
........
try {
mPowerManagerService.systemReady(mActivityManagerService.getAppOpsService());
.........
} catch (Throwable e) {
.........
}
........
}SystemServer.java中PMS涉及的地方主要有两处:
1、利用startService启动PMS。
之前分析PKMS时我们已经提过,startService主要通过反射调用服务的构造函数,然后再调用服务的onStart函数。
2、调用PMS的systemReady方法。
接下来我们就分三部分,分别看看PMS的构造函数、onStart函数及systemReady函数涉及到的流程。
一、构造函数
PowerManagerService的构造函数如下所示:
public PowerManagerService(Context context) {
............
//ServiceThread继承自HandlerThread,专门针对系统服务定义的,应该是优先级更高吧
mHandlerThread = new ServiceThread(TAG,
Process.THREAD_PRIORITY_DISPLAY, false /*allowIo*/);
mHandlerThread.start();
mHandler = new PowerManagerHandler(mHandlerThread.getLooper());
synchronized (mLock) {
//创建一些锁对象,同构acquire和release修改引用数
mWakeLockSuspendBlocker = createSuspendBlockerLocked("PowerManagerService.WakeLocks");
mDisplaySuspendBlocker = createSuspendBlockerLocked("PowerManagerService.Display");
mDisplaySuspendBlocker.acquire();
mHoldingDisplaySuspendBlocker = true;
mHalAutoSuspendModeEnabled = false;
mHalInteractiveModeEnabled = true;
mWakefulness = WAKEFULNESS_AWAKE;
nativeInit();
nativeSetAutoSuspend(false);
nativeSetInteractive(true);
nativeSetFeature(POWER_FEATURE_DOUBLE_TAP_TO_WAKE, 0);
}
}容易看出PMS的构造函数较为简单,仅需要进一步分析其native函数的作用。
在com_android_server_power_PowerManagerService.cpp中:
static void nativeInit(JNIEnv* env, jobject obj) {
//创建一个全局引用对象,引用PMS
gPowerManagerServiceObj = env->NewGlobalRef(obj);
//利用hw_get_module加载底层动态库,具体实现还是依赖与dlsym函数
status_t err = hw_get_module(POWER_HARDWARE_MODULE_ID,
(hw_module_t const**)&gPowerModule);
if (!err) {
//调用底层动态库的init函数
gPowerModule->init(gPowerModule);
} else {
ALOGE("Couldn't load %s module (%s)", POWER_HARDWARE_MODULE_ID, strerror(-err));
}
}
static void nativeSetAutoSuspend(JNIEnv* /* env */, jclass /* clazz */, jboolean enable) {
if (enable) {
ALOGD_IF_SLOW(100, "Excessive delay in autosuspend_enable() while turning screen off");
autosuspend_enable();
} else {
ALOGD_IF_SLOW(100, "Excessive delay in autosuspend_disable() while turning screen on");
//初始时调用autosuspend_disable函数,定义于system/core/libsuspend/autosuspend.c中
//最终将调用到autosuspend_earlysuspend_disable函数,就是将底层的置为pwr_state_on的状态
autosuspend_disable();
}
}
static void nativeSetInteractive(JNIEnv* /* env */, jclass /* clazz */, jboolean enable) {
if (gPowerModule) {
if (enable) {
ALOGD_IF_SLOW(20, "Excessive delay in setInteractive(true) while turning screen on");
//初始时,调用动态库的setInteractive函数,目前还不确定这个函数调用后的效果
gPowerModule->setInteractive(gPowerModule, true);
} else {
ALOGD_IF_SLOW(20, "Excessive delay in setInteractive(false) while turning screen off");
gPowerModule->setInteractive(gPowerModule, false);
}
}
}
static void nativeSetFeature(JNIEnv *env, jclass clazz, jint featureId, jint data) {
int data_param = data;
if (gPowerModule && gPowerModule->setFeature) {
//初始时,调用动态库的setFeature函数,将POWER_FEATURE_DOUBLE_TAP_TO_WAKE置为0
gPowerModule->setFeature(gPowerModule, (feature_t)featureId, data_param);
}
}从上面的代码可以看出,PMS的构造函数还是比较简单的,就是创建一些基本的成员,然后利用native函数加载底层的动态库,并设置一些状态和标志位。
二、onStart
接下来我们看看PMS的onStart函数:
public void onStart() {
publishBinderService(Context.POWER_SERVICE, new BinderService());
publishLocalService(PowerManagerInternal.class, new LocalService());
Watchdog.getInstance().addMonitor(this);
Watchdog.getInstance().addThread(mHandler);
}从代码来看,onStart内容可以分成3类,即发布BinderService、发布LocalService和完成watchdog相关的工作。
我们分别看看这3类工作具体的流程。
1、publishBinderService
publishBinderService定义在PMS的父类SystemService中:
//PMS中的BinderService继承自IPowerManager.Stub,实现了IBinder接口
//name为PMS的名称,power
protected final void publishBinderService(String name, IBinder service) {
publishBinderService(name, service, false);
}
protected final void publishBinderService(String name, IBinder service,
boolean allowIsolated) {
//调用ServiceManger的接口,实际上利用Binder通信向Service Manger进程注册服务
ServiceManager.addService(name, service, allowIsolated);
}通过上述代码,PMS就将内部定义的BinderService注册到Service Manager进程,对应的名称为”power”。
2、publishLocalService
publishLocalService同样定义在PMS的父类SystemService中:
//参数中的LocalService继承自PowerManagerInternal类
protected final void publishLocalService(Class type, T service) {
LocalServices.addService(type, service);
} 我们来看看LocalServices类的addService函数:
/**
* Adds a service instance of the specified interface to the global registry of local services.
*/
public static void addService(Class type, T service) {
synchronized (sLocalServiceObjects) {
if (sLocalServiceObjects.containsKey(type)) {
throw new IllegalStateException("Overriding service registration");
}
sLocalServiceObjects.put(type, service);
}
} 从代码来看,LocalServices的作用与单例模式有些相似,不过更为严格。
单例模式用于保证某个类只能创建出一个对象; LocalServices管理对象时,确保继承某个类或接口的对象只有一个。
目前,还看不出PMS利用LocalServices管理其内部的LocalService的理由,先在此留个悬念。
3、watchdog相关工作
在之前的博客中,分析过Android 6.0中watchdog流程。
对于watchdog而言,Android 7.0与Android 6.0基本类似,这里仅再简单介绍一下涉及到的流程。
//PMS实现了Watchdog.Monitor接口,下面的代码将PMS加入到watchdog的mMonitorChecker中
Watchdog.getInstance().addMonitor(this);
//将PMS的ServiceThread对对应的handler传入watchdog中,watchdog将利用该handler构造一个HandlerChecker
Watchdog.getInstance().addThread(mHandler);3.1 addThread
当PMS调用addThread时,watchDog利用mHandler构造一个HandlerChecker,然后周期性地调用HandlerChecker的scheduleCheckLocked方法:
public void scheduleCheckLocked() {
//PMS对应的HandlerChecker没有monitor,因此mMonitors.size()恒等于0
//调用MessageQueue的isPolling函数,判断是否处于polling状态;
//当MessageQueue native层的looper处于等待状态,即没有事件需要处理时,isPolling返回true
if (mMonitors.size() == 0 && mHandler.getLooper().getQueue().isPolling()) {
mCompleted = true;
return;
}
if (!mCompleted) {
// we already have a check in flight, so no need
return;
}
mCompleted = false;
mCurrentMonitor = null;
mStartTime = SystemClock.uptimeMillis();
//HandlerChecker继承runnable,这里的意思是向PMS的handler发送一个HandlerChecker类型的runnable事件
mHandler.postAtFrontOfQueue(this);
}
public void run() {
final int size = mMonitors.size();
//PMS对应的HandlerChecker的mMonitors.size为0,跳过
for (int i = 0 ; i < size ; i++) {
synchronized (Watchdog.this) {
mCurrentMonitor = mMonitors.get(i);
}
mCurrentMonitor.monitor();
}
//只要PMS的mHandler在规定事件内,执行了上文传入的runnable事件,就说明没有阻塞,PMS是正常的
synchronized (Watchdog.this) {
mCompleted = true;
mCurrentMonitor = null;
}
}3.2 addMonitor
当PMS调用watchDog的addMonitor函数后,watchDog就会周期性地调用PMS的monitor接口:
public void monitor() {
// Grab and release lock for watchdog monitor to detect deadlocks.
synchronized (mLock) {
}
}PMS只要能在规定时间内获得mLock锁,watchDog就能确认PMS没有死锁,状态正常。
以上只是简略介绍了一下watchDog相关的内容,详情可以参考下面的博客。
Android6.0 watchdog
三、systemReady
接下来我们看一下PMS的systemReady函数:
public void systemReady(IAppOpsService appOps) {
//这里持锁,意味者内部所有函数必须在规定事件内执行完毕
//否则watchDog将会检测到错误
synchronized (mLock) {
mSystemReady = true;
mAppOps = appOps;
//注意下面的对象都是从LocalServices取出的,从之前PMS加入LocalServices的流程来看
//下面取出的实际上应该是继承抽象类的实际子类
//因此大概可以理解LocalServices的作用了,以抽象类名为key,保存实际的子类
//以key取出子类对象时,子类退化为抽象类,于是得到了实际对象,但仅能利用父类的接口
//整个设计演变为面向接口的编程
//从注释来看,与doze有关
mDreamManager = getLocalService(DreamManagerInternal.class);
//显示管理相关
mDisplayManagerInternal = getLocalService(DisplayManagerInternal.class);
//Window管理相关
mPolicy = getLocalService(WindowManagerPolicy.class);
//电源管理相关
mBatteryManagerInternal = getLocalService(BatteryManagerInternal.class);
//这里获取PowerManager就是为了方便获取下面三个系统属性
PowerManager pm = (PowerManager) mContext.getSystemService(Context.POWER_SERVICE);
mScreenBrightnessSettingMinimum = pm.getMinimumScreenBrightnessSetting();
mScreenBrightnessSettingMaximum = pm.getMaximumScreenBrightnessSetting();
mScreenBrightnessSettingDefault = pm.getDefaultScreenBrightnessSetting();
//Sensor相关
SensorManager sensorManager = new SystemSensorManager(mContext, mHandler.getLooper());
//系统电量统计有关
mBatteryStats = BatteryStatsService.getService();
// The notifier runs on the system server's main looper so as not to interfere
// with the animations and other critical functions of the power manager.
mNotifier = new Notifier(Looper.getMainLooper(), mContext, mBatteryStats,
mAppOps, createSuspendBlockerLocked("PowerManagerService.Broadcasts"),
mPolicy);
//无线充电检测相关
mWirelessChargerDetector = new WirelessChargerDetector(sensorManager,
createSuspendBlockerLocked("PowerManagerService.WirelessChargerDetector"),
mHandler);
mSettingsObserver = new SettingsObserver(mHandler);
//lightService相关
mLightsManager = getLocalService(LightsManager.class);
mAttentionLight = mLightsManager.getLight(LightsManager.LIGHT_ID_ATTENTION);
// Initialize display power management.
//调用DisplayManagerService内部的LocalService的函数
//创建出DisplayBlanker和DisplayPowerController
mDisplayManagerInternal.initPowerManagement(
mDisplayPowerCallbacks, mHandler, sensorManager);
//定义一堆BroadcastReceiver
..................
//利用mSettingsObserver监听一堆数据库字段的变化
..................
//VR相关
IVrManager vrManager =
(IVrManager) getBinderService(VrManagerService.VR_MANAGER_BINDER_SERVICE);
try {
vrManager.registerListener(mVrStateCallbacks);
} catch (RemoteException e) {
Slog.e(TAG, "Failed to register VR mode state listener: " + e);
}
//从资源文件中读取大量配置信息
readConfigurationLocked();
//读取数据库字段,保存到本地变量中
//必要时会进行一些实际的操作,例如设置feature到native层的动态库
updateSettingsLocked();
mDirty |= DIRTY_BATTERY_STATE;
//更新全局的电源状态
updatePowerStateLocked();
}
}从代码来看,PMS在systemReady中主要是获得一些成员变量,注册一些广播接收对象、读取一些配置参数等。虽然PMS会与多个服务打交道,使得systemReady内容较为庞杂,但整个过程比较简单。
在systemReady函数的最后,调用了一个比较重要的函数updatePowerStateLocked。当PMS监控到终端发生重大变化时,将利用该函数集中更新所有相关的状态。updatePowerStateLocked涉及的内容较多,等对PMS整体有了初步的了解后,再来分析这个函数。
总结
本篇博客侧重于介绍PMS的启动过程,同时对PMS需要打交道的服务建立一个基本的认识。