【One Shot】《Siamese Neural Networks for One-shot Image Recognition》
ICML-2015
文章目录
- 1 Motivation
- 2 Innovation
- 3 Advantages
- 4 Model
- 4 Learning
- 4.1 loss function
- 4.2 Optimization
- 4.3 Weight initialization
- 4.4 Learning schedule
- 4.5 Hyperparameter optimization
- 4.6 Affine distortions
- 5 Training and Testing
- 5.1 Database
- 5.2 Training
- 5.3 Testing
- 6 Experiment
1 Motivation
机器学习虽然在很多领域取得不错的结果,但是 It often broken down when forced to make predictions about data for which little supervised information is available.
李飞飞第一次提出One-short learning的概念
One-shot learning may only observe a single example of each possible class before making a prediction about a test instance.
但是One-shot learning excel at similar instances but fail to offer robust solutions that may be applied to other types of problems.
作者基于One-shot learning的方法,结合了siamese neural networks,通过学习discriminative来改善传统机器学习的这种缺陷!
2 Innovation
我觉得是one-shot 和 Siamese Neural Networks的一种结合(用了深度的网络)
3 Advantages
1) are capable of learning generic image features useful for making predictions about unknown class distributions,哪怕未知类样本很少
2)很容易训练
3)用深度学习的方法,而不是 rely domain-specific knowledge
4 Model
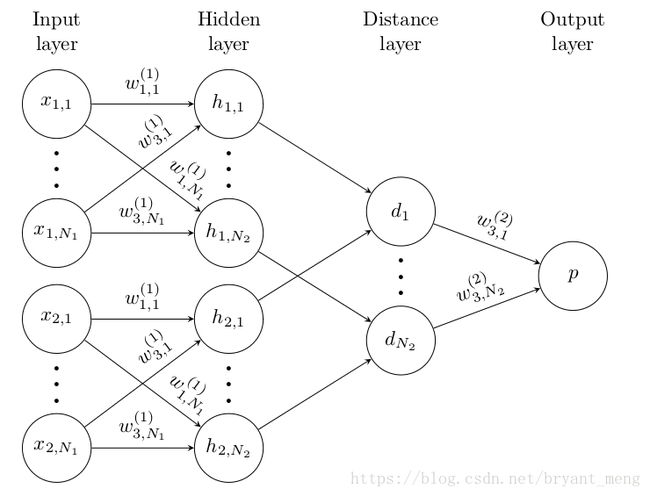
L L L layers each with N l N_{l} Nl units
h 1 , l h_{1,l} h1,l denotes layer l l l for the first twin
h 2 , l h_{2,l} h2,l denotes layer l l l for the second twin
Thus the kth filter map in each layer takes the following form

卷积→ReLU→max pooling
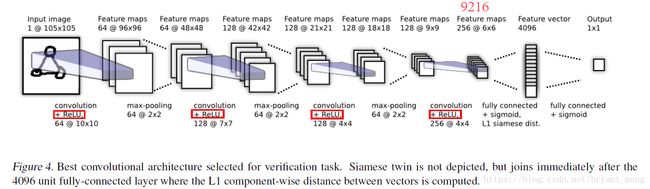
单个网络,没有画出孪生网络,孪生网络实际是这样的
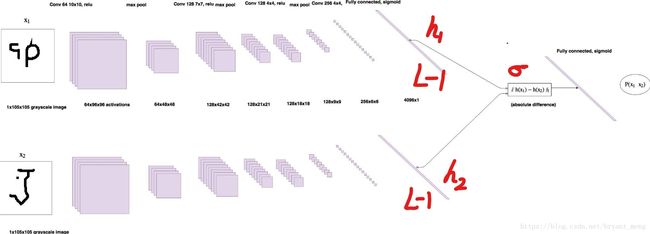
最后的连接方式为
p = σ ( ∑ j α j ∣ h 1 , L − 1 ( j ) − h 2 , L − 1 ( j ) ∣ ) p = \sigma (\sum_{j}\alpha _{j}\left | h_{1,L-1}^{(j)} - h_{2,L-1}^{(j)}\right | ) p=σ(j∑αj∣∣∣h1,L−1(j)−h2,L−1(j)∣∣∣)
The α j \alpha _{j} αj are additional parameters that are learned by the model during training.
$ \sigma$ 是sigmoid函数,图形如下 1 / ( 1 + e − x ) 1/(1+e^{-x}) 1/(1+e−x)
4 Learning
4.1 loss function
采用的是cross entropy 损失

y y y 是 label,如果 x 1 x_{1} x1, x 2 x_{2} x2 是同一类,则 y ( x 1 , x 2 ) y(x_{1},x_{2}) y(x1,x2)为1,否则为 0
λ ∣ W ∣ 2 \lambda \left | W \right |^{2} λ∣W∣2 是正则化
我们可以验证下上面的损失函数
1)当 x 1 x_{1} x1, x 2 x_{2} x2 是同一类
y ( x 1 , x 2 ) y(x_{1},x_{2}) y(x1,x2)为1,$1-y(x_{1},x_{2}) 为 0 , , ,L(x_{1},x_{2}) = log p(x_{1},x_{2}) $,要使得 $L(x_{1},x_{2}) $更小,则 $ p(x_{1},x_{2})$更小,根据 p p p 的定义知, h 1 , L − 1 ( j ) , h 2 , L − 1 ( j ) h_{1,L-1}^{(j)} ,h_{2,L-1}^{(j)} h1,L−1(j),h2,L−1(j)需要差距更小,与假设 x 1 x_{1} x1, x 2 x_{2} x2 是同一类相吻合。
2)当 x 1 x_{1} x1, x 2 x_{2} x2 不是同一类
y ( x 1 , x 2 ) y(x_{1},x_{2}) y(x1,x2)为0,$1-y(x_{1},x_{2}) 为 1 , , ,L(x_{1},x_{2}) = log (1-p(x_{1},x_{2})) $,要使得 $L(x_{1},x_{2}) $更小,则 $ p(x_{1},x_{2})$更大,根据 p p p 的定义知, h 1 , L − 1 ( j ) , h 2 , L − 1 ( j ) h_{1,L-1}^{(j)} ,h_{2,L-1}^{(j)} h1,L−1(j),h2,L−1(j)需要差距更大,与假设 x 1 x_{1} x1, x 2 x_{2} x2 不是同一类相吻合。
4.2 Optimization
采用mini-batch size、momentum、learning rate、regularization 策略优化,公式如下

▽ W k j \bigtriangledown W_{kj} ▽Wkj is the partial derivative with respect to the weight between the j j j th neuron in some layer and the k k k th neuron in the successive layer.
M M M - mini-batch is 128
i i i - i i ith mini-batch
η \eta η - learning rate
μ \mu μ - momentum
$\lambda $ - regularization
T T T - epoch
4.3 Weight initialization
卷积层的 W 初始化满足正态分布,zero-mean、standard deviation 0.01
卷积层的 b 初始化满足正态分布,mean 0.5 、 standard deviation 0.01
全连接层 W 初始化满足正态分布,zero-mean、standard deviation 0.2
全连接层的 b 初始化和卷积层的一样
4.4 Learning schedule
η T = 0.99 η T − 1 \eta^{T} = 0.99 \eta^{T-1} ηT=0.99ηT−1 learning rate 随着 epoch 在衰减
μ \mu μ momentum 初始化0.5,最终到 μ j \mu_{j} μj,随着epoch线性增长
epoch 为 200,作者在validation上随机选出 a set of 320 one shot learning tasks用于监控,20 epochs没有下降的话就停止训练,选最优表现的参数。loss一直下降的话就不停止。
4.5 Hyperparameter optimization
用Bayesian optimization framework,在
η ∈ [ 1 0 − 4 , 1 0 − 1 ] \eta \in [10^{-4},10^{-1}] η∈[10−4,10−1]
μ ∈ [ 0 , 1 ] \mu \in [0,1] μ∈[0,1]
λ ∈ [ 0 , 0.1 ] \lambda \in [0,0.1] λ∈[0,0.1]
卷积核 3×3 到 20×20
卷积核个数 从16 to 256 using multiples of 16
Fully-connected layers ranged from 128 to 4096 units
选最优的
4.6 Affine distortions
仿射变换
T = ( θ , ρ x , ρ y , s x , s y , t x , t x ) T = (\theta, \rho _{x},\rho _{y}, s_{x},s_{y},t_{x},t_{x}) T=(θ,ρx,ρy,sx,sy,tx,tx)
θ ∈ [ − 10.0 , 10.0 ] \theta \in [-10.0,10.0] θ∈[−10.0,10.0]
ρ x , ρ y ∈ [ − 0.3 , 0.3 ] \rho _{x},\rho _{y} \in [-0.3,0.3 ] ρx,ρy∈[−0.3,0.3]
s x , s y ∈ [ 0.8 , 1.2 ] s_{x},s_{y}\in[0.8,1.2] sx,sy∈[0.8,1.2]
t x , t x ∈ [ − 2 , 2 ] t_{x},t_{x}\in[-2,2] tx,tx∈[−2,2]
Each of these components of the transformation is included with probability 0.5.
仿射变换的原理可以看这篇博客 affine transformation matrix 仿射变换矩阵 与 OpenGL
5 Training and Testing
5.1 Database
Omniglot consists of 1623 characters from 50 different alphabets. Each of these was hand drawn by 20 different people.
在Omniglot data set上,此数据集有
50 种 alphabets(语言)
每种 alphabets 有15 to upwards of 40 characters(字符)
每种characters 有 20个drawers(样本)
40 种 alphabet 作为 background set(train)
10 种 alphabet 作为 evaluation set(test)
The background set is used for developing a model by learning hyperparameters and feature mappings.
The evaluation set is used only to measure the one-shot classification performance.
5.2 Training
比如mini-batch是32,就一次输入32组图片,从训练集中的 characters 中随机选32种(比如训练集有1200种characters),记为 categories[0-31]
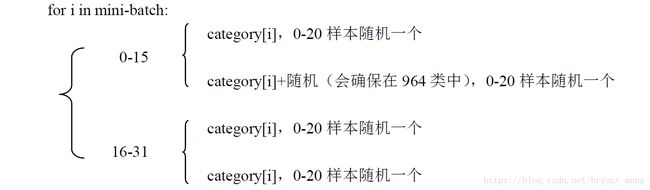
1-16组的label为0,17-32组的label为1
5.3 Testing
N-way,比如20-way,从测试集中选20种 characters,记录为category[0-19]
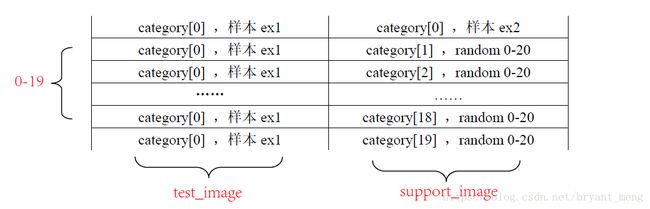
这只是对一个图片做了测试,循环 k 次,相当于测试了 k 张图
6 Experiment
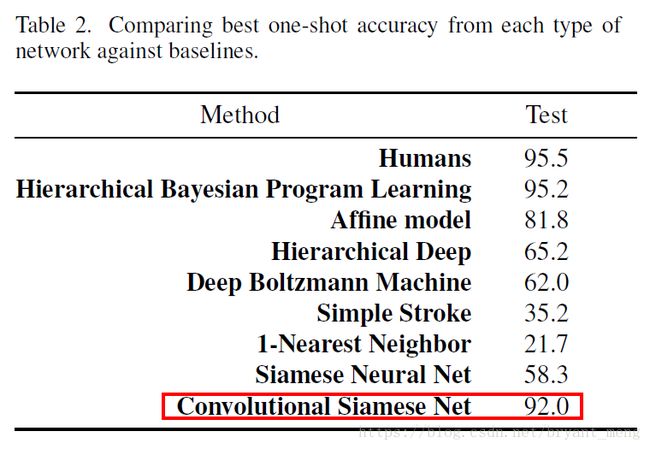
下面是一些方法的对比,横坐标是N-way

代码地址 https://github.com/sorenbouma/keras-oneshot
代码作者对论文的解析 https://sorenbouma.github.io/blog/oneshot/
翻译版本 http://www.sohu.com/a/169212370_473283
参考
【1】One Shot Learning and Siamese Networks in Keras
【2】affine transformation matrix 仿射变换矩阵 与 OpenGL
【3】https://github.com/sorenbouma/keras-oneshot
【4】https://github.com/Goldesel23/Siamese-Networks-for-One-Shot-Learning
【5】【深度神经网络 One-shot Learning】孪生网络少样本精准分类
【6】当小样本遇上机器学习 fewshot learning
【7】深度学习: Zero-shot Learning / One-shot Learning / Few-shot Learning
【8】《Matching Networks for One Shot Learning》