CUDA编程—通过shared memory优化矩阵相乘
1、矩阵乘的CPU代码
下面的所有均亲自测试,可直接运行
#include
using namespace std;
void MatrixMulOnHost(int m, int n, int k, float* A, float* B, float* C)
{
for (int Row = 0; Row < m; ++ Row)
for (int Col = 0; Col < k; ++ Col )
{
float sum = 0;
for (int i = 0; i < n; ++i)
{
float a = A[Row * n + i];
float b = B[Col + i * k];
sum += a * b;
}
C[Row* k + Col] = sum;
}
}
int main()
{
//这里将矩阵按照行优先转换成了一维的形式
float A[6] = { 11.4, 24, 33.5, 45, 55 ,32.4 }; //2×3的矩阵
float B[12] = {12,43,22.4, 31.3, 12,324,23,12, 44.4,23.4,65.3,73};//3×4的矩阵
float C[8] = { 0 }; //2×4的结果矩阵
int m=2,n=3,k=4;
MatrixMulOnHost(m, n, k, A, B, C);
//输出结果
for (int i=0;i<8;i++)
{
cout< 2、矩阵乘的GPU代码--体会SIMT的思想
体会:首先考虑其中的一个thread是如何实现指令的,然后考虑如何进行并行化处理的。
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include
using namespace std;
cudaError_t addWithCuda(int *c, const int *a, const int *b, unsigned int size);
__global__ void MatrixMulKernle(int m, int n, int k, float *A,float *B, float *C)
{
int Row=blockIdx.y*blockDim.y+threadIdx.y;
int Col=blockIdx.x*blockDim.x+threadIdx.x;
if((Row>>(m,n,k,d_a,d_b,d_c);
//将结果传回到主机端
cudaMemcpy(C, d_c, size*8, cudaMemcpyDeviceToHost);
//输出结果
for (int i=0;i<8;i++)
{
cout< 性能分析:
(1)低性能源于对globalmemory的访问
a.Dynamic random access memory (DRAM)
b.长的访问延迟(数百个时钟周期)
c.有限的访问带宽(2)对global memory存储交互拥塞导致少量线程可执行,使得SM闲置
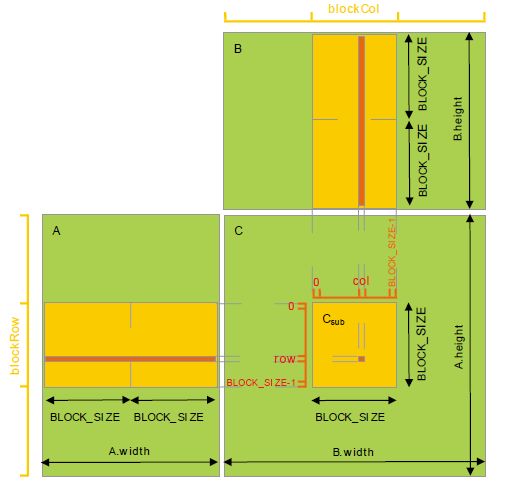
3、通过shared memory提升优化GPU代码
使用shared memory带来两点优化:
(1)使用共享存储器减少了线程块中的线程必须访问的数据总量。
(2)使用共享存储器来实现存储空间的合并。(下篇文章展开介绍)
使用程序如下:
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include
using namespace std;
#define TILE_WIDTH 16
__global__ void MatrixMulKernle(int m, int n, int k, float *A,float *B, float *C)
{
//申请共享内存,存在于每个block中
__shared__ float ds_A[TILE_WIDTH][TILE_WIDTH];
__shared__ float ds_B[TILE_WIDTH][TILE_WIDTH];
//简化坐标记法,出现下面6个表示的地方就是并行的地方。
int bx = blockIdx.x; int by = blockIdx.y;
int tx = threadIdx.x; int ty = threadIdx.y;
//确定结果矩阵中的行和列
int Row = by * TILE_WIDTH + ty;
int Col = bx * TILE_WIDTH + tx;
//临时变量
float Cvalue = 0;
//循环读入A,B瓦片,计算结果矩阵,分阶段进行计算
for (int t=0; t<(n-1)/TILE_WIDTH+1; ++t)
{
//将A,B矩阵瓦片化的结果放入shared memory中,每个线程加载相应于C元素的A/B矩阵元素
if (Row < m && t * TILE_WIDTH + tx < n) //越界处理,满足任意大小的矩阵相乘(可选)
//ds_A[tx][ty] = A[t*TILE_WIDTH + tx][Row];
ds_A[tx][ty] = A[Row*n+t*TILE_WIDTH+tx];//以合并的方式加载瓦片
else
ds_A[tx][ty] = 0.0;
if (t * TILE_WIDTH + ty < n && Col < k)
//ds_B[tx][ty] = B[Col][t*TILE_WIDTH + ty];
ds_B[tx][ty] = B[(t*TILE_WIDTH + ty)*k+Col];
else
ds_B[tx][ty] = 0.0;
//保证tile中所有的元素被加载
__syncthreads();
for (int i = 0; i < TILE_WIDTH; ++i)
Cvalue += ds_A[i][ty] * ds_B[tx][i];//从shared memory中取值
//确保所有线程完成计算后,进行下一个阶段的计算
__syncthreads();
if(Row < m && Col < k)
C[Row*k+Col]=Cvalue;
}
}
int main()
{
//这里将矩阵按照行优先转换成了一维的形式
//实际中数组数量巨大,这里只是为了演示程序的过程
float A[6] = { 11.4, 24, 33.5, 45, 55 ,32.4 }; //2×3的矩阵
float B[12] = {12,43,22.4, 31.3, 12,324,23,12, 44.4,23.4,65.3,73};//3×4的矩阵
float C[8] = { 0 }; //2×4的结果矩阵
int m=2,n=3,k=4;
//分配显存空间
int size = sizeof(float);
float *d_a;
float *d_b;
float *d_c;
cudaMalloc((void**)&d_a,m*n*size);
cudaMalloc((void**)&d_b,n*k*size);
cudaMalloc((void**)&d_c,m*k*size);
//把数据从Host传到Device
cudaMemcpy(d_a, A, size*6, cudaMemcpyHostToDevice);
cudaMemcpy(d_b, B, size*12, cudaMemcpyHostToDevice);
cudaMemcpy(d_c, C, size*8, cudaMemcpyHostToDevice);
//分配网格结构
dim3 dimGrid((k-1)/TILE_WIDTH+1,(m-1)/TILE_WIDTH+1,1); //向上取整
dim3 dimBlock(TILE_WIDTH,TILE_WIDTH,1);
//调用内核函数
MatrixMulKernle<<>>(m,n,k,d_a,d_b,d_c);
//将结果传回到主机端
cudaMemcpy(C, d_c, size*8, cudaMemcpyDeviceToHost);
//输出结果
for (int i=0;i<8;i++)
{
cout<