net定义网络, 整个网络中含有很多layers, net.cpp负责计算整个网络在训练中的forward, backward过程, 即计算forward/backward 时各layer的gradient。
看一下官网的英文描述:
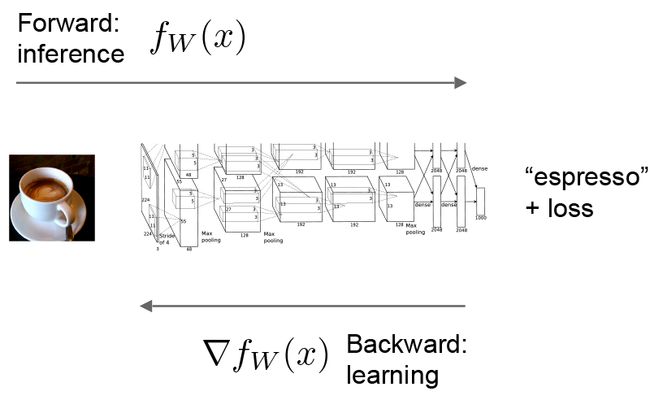
The forward and backward passes are the essential computations of a Net.
Let’s consider a simple logistic regression classifier.
The forward pass computes the output given the input for inference.In forward Caffe composes the computation of each layer to compute the “function” represented by the model.This pass goes from bottom to top.
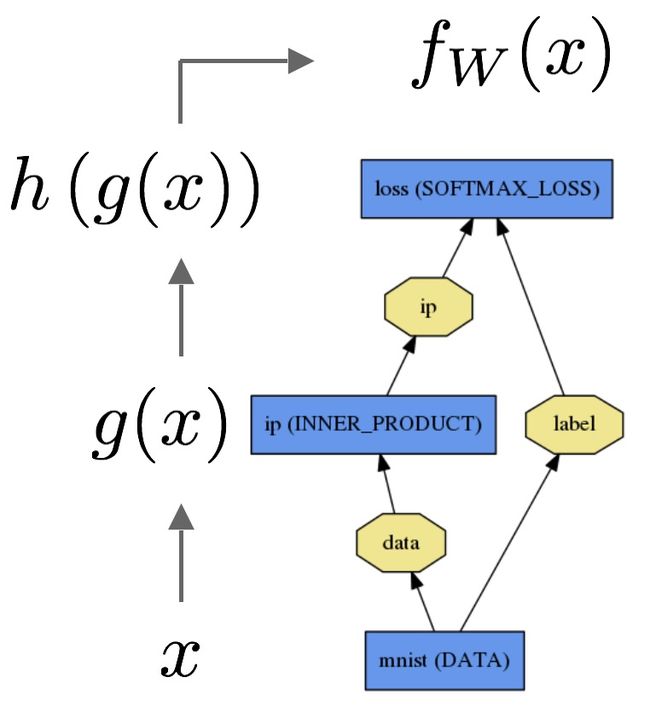
The data x is passed through an inner product layer for g(x) then through a softmax for h(g(x)) and softmax loss to give fW(x).
The backward pass computes the gradient given the loss for learning.In backward Caffe reverse-composes the gradient of each layer to compute the gradient of the whole model by automatic differentiation.This is back-propagation.This pass goes from top to bottom.
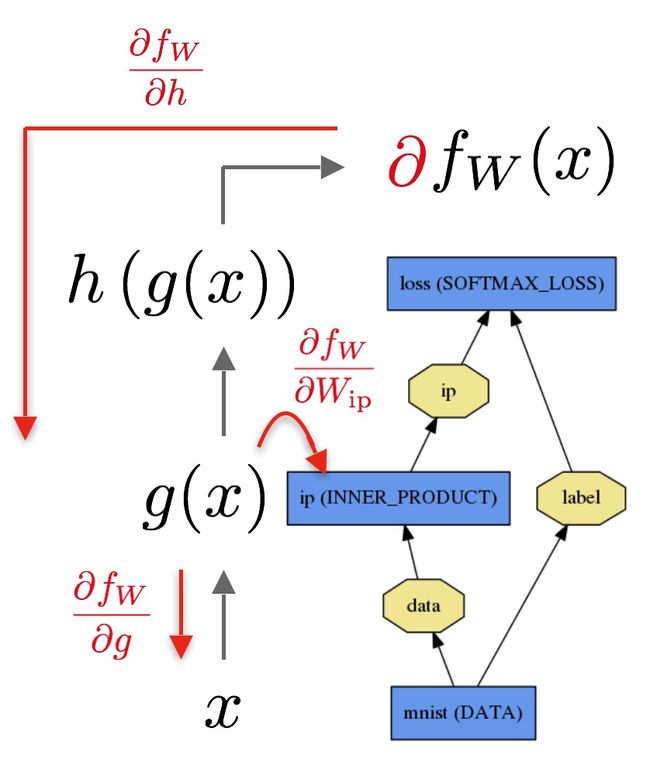
The backward pass begins with the loss and computes the gradient with respect to the output∂fW∂h. The gradient with respect to the rest of the model is computed layer-by-layer through the chain rule. Layers with parameters, like theINNER_PRODUCT layer, compute the gradient with respect to their parameters∂fW∂Wip during the backward step.
These computations follow immediately from defining the model: Caffe plans and carries out the forward and backward passes for you.
- The
Net::Forward() and Net::Backward() methods carry out the respective passes while Layer::Forward() and Layer::Backward() compute each step.
- Every layer type has
forward_{cpu,gpu}() andbackward_{cpu,gpu}() methods to compute its steps according to the mode of computation. A layer may only implement CPU or GPU mode due to constraints or convenience.
The Solver optimizes a model by first calling forward to yield the output and loss, then calling backward to generate the gradient of the model, and then incorporating the gradient into a weight update that attempts to minimize the loss. Division of labor between the Solver, Net, and Layer keep Caffe modular and open to development.
net的实现:
#include
#include