使用kinect2进行目标跟踪-ROS平台
之前闲得无聊,在ROS平台上调用Kinect摄像头进行目标跟踪检测。
首先,要在ubuntu下安装好Kinect2和ROS的接口,参考http://www.mamicode.com/info-detail-1572423.html
我贴一个.cpp的代码,详细的工程文件放github了https://github.com/haicheng12/kinect2_track
#include //ros标准库头文件
#include //C++标准输入输出库
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
namespace enc = sensor_msgs::image_encodings;
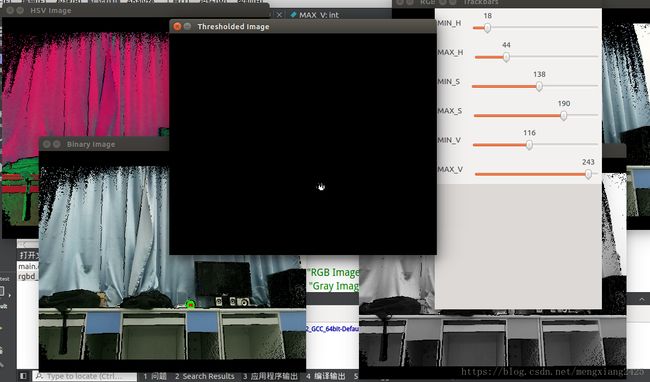
int MIN_H = 18;
int MIN_S = 138;
int MIN_V = 116;
int MAX_H = 44;
int MAX_S = 190;
int MAX_V = 243;
static const string RGB_Window = "RGB Image";
static const string Gray_Window = "Gray Image";
static const string HSV_Window = "HSV Image";
static const string Thresholded_Window = "Thresholded Image";
static const string Track_Window = "Track Image";
//定义一个转换的类
class KINECT2_ROS
{
private:
ros::NodeHandle nh_; //定义ROS句柄
image_transport::ImageTransport it_; //定义一个image_transport实例
image_transport::Subscriber img_sub_;//hsv
image_transport::Publisher image_pub_; //定义ROS图象发布器
public:
Mat rgbImage;
KINECT2_ROS()
:it_(nh_) //构造函数
{
img_sub_ = it_.subscribe("/kinect2/sd/image_color_rect", 1,&KINECT2_ROS::img_callback, this);
image_pub_ = it_.advertise("/kinect2/sd/image_color/output", 1);
//初始化输入输出窗口
namedWindow("Trackbars");
createTrackbar("MIN_H","Trackbars",&MIN_H,180,NULL);
createTrackbar("MAX_H","Trackbars",&MAX_H,180,NULL);
createTrackbar("MIN_S","Trackbars",&MIN_S,256,NULL);
createTrackbar("MAX_S","Trackbars",&MAX_S,256,NULL);
createTrackbar("MIN_V","Trackbars",&MIN_V,256,NULL);
createTrackbar("MAX_V","Trackbars",&MAX_V,256,NULL);
namedWindow(RGB_Window);
namedWindow(Gray_Window);
namedWindow(HSV_Window);
namedWindow(Thresholded_Window);
namedWindow(Track_Window);
}
~KINECT2_ROS() //析构函数
{
destroyWindow(RGB_Window);
destroyWindow(Gray_Window);
destroyWindow(HSV_Window);
destroyWindow(Thresholded_Window);//Track_Window
destroyWindow(Track_Window);
}
void img_callback(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(msg);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("tutorialROSOpenCV::main.cpp::cv_bridge exception: %s", e.what());
return;
}
cv_ptr->image.copyTo(rgbImage);
Mat image_gray,img_hsv,img_mask;
cvtColor(cv_ptr->image, image_gray, CV_RGB2GRAY);//灰度处理
cvtColor(cv_ptr->image,img_hsv,CV_BGR2HSV);//hsv处理
inRange(img_hsv,cv::Scalar(MIN_H,MIN_S,MIN_V),cv::Scalar(MAX_H,MAX_S,MAX_V),img_mask);//滚动条范围
imshow(RGB_Window, cv_ptr->image);
imshow(Gray_Window, image_gray);
imshow(HSV_Window, img_hsv);
imshow(Thresholded_Window, img_mask);
Mat result = rgbImage.clone();
//查找轮廓并绘制轮廓
vector > contours;
findContours(img_mask, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
drawContours(result, contours, -1, Scalar(0, 0, 255), 2);//在result上绘制轮廓
//查找正外接矩形
vector boundRect(contours.size());
for (int i = 0; i < contours.size(); i++)
{
boundRect[i] = boundingRect(contours[i]);
rectangle(result, boundRect[i], Scalar(0, 255, 0), 2);//在result上绘制正外接矩形
}
//计算外界矩形的面积
for (int i = 0; i < (int)boundRect.size(); i++)
{
double Outline_Area = contourArea(contours[i], true);//轮廓的面积
cout << "【用轮廓面积计算函数计算出来的第" << i << "个轮廓的面积为:】" << Outline_Area << endl;
}
imshow(Track_Window, result);
waitKey(3);
image_pub_.publish(cv_ptr->toImageMsg());
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "Image_test");
KINECT2_ROS obj;
ros::spin();
} 具体效果如图,其实也就是用了些HSV,调用个kinect图像,费这么大周转,服了我自己......