SO-Net论文阅读笔记(1)SOM
SO-Net论文阅读笔记(1)SOM
这是CVPR2018新出来的论文,大体看了一下,里面用的想法和之前写的PointCNN有神似之处,挺赶兴趣的,于是就精读一下。markdown对图片的支持真的难受,凑合一下吧。
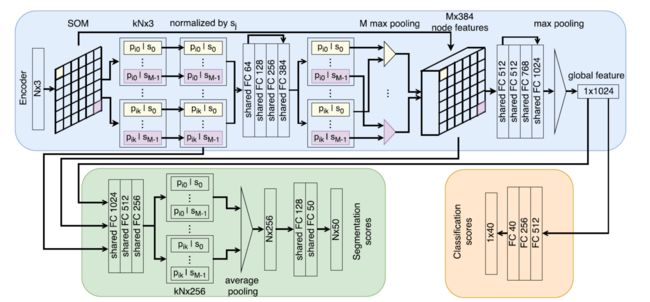
这是整体的网络结构,我们来一点一点分析。
1. SOM 自组织竞争网络
最底层(最前面)的SOM被用于产生点云数据的低维表示(在这篇文章里是2维)。使用的学习方法是无监督竞争学习,而不是反向传播。但是原始的训练方法不是排列不变的,换句话说当输入数据顺序变化时,学习的结果是不同的。作者认为这主要时两个原因导致的:
- 训练结果与SOM节点的初始化高度相关,换句话说不同的初始参数会产生不同结果
- 依赖于单个样本的更新方法与输入样本的顺序相关
根据这两个特点,为了使得SOM对输入数据的排序适应采用的策略是:
- 初始化时不再采用随机初始化,而采用固定的参数配置
- 在计算完所有点之后再进行参数更新
因为点云数据三个轴都被标准化到[-1, +1]的区间内,所以采用某一个初始化方法,将节点初始化到这个区域内即可。作者在这里说可以采用简单的potential field来生成初始猜测,这里不太理解具体是什么方法,等到分析具体算法再说。而采用batch update的原因,作者说这样做的更新对某一给定点云是决确定的,还引用了一个参考文献《自组织映射》,估计里面应该有这个结论的数学证明,先放着当结果用。
因为SOM采用的是无监督学习,所以这部分的计算完全是和后面的计算分开的,完全可以先把这部分研究明白,再去分析后面的网络,一点一点来嘛。先上一个作者做出来的事例图
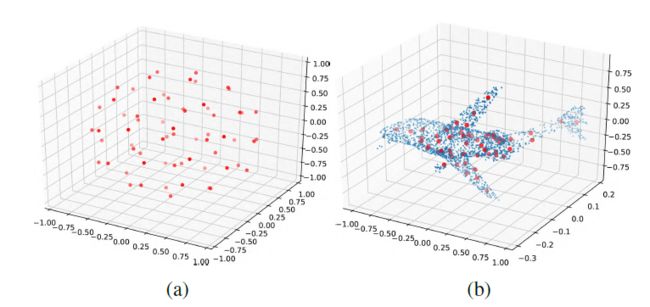
a是初始化的结果,b是节点训练完成之后的节点分布情况
论文的附录D部分更加详细的描述了作者实现SOM的算法。
1.1 SOM节点初始化
除了要对排序拥有不变性之外,初始化还必须要防止学习结果陷入局部最小值。次优结果的SOM可能使得节点被孤立的隔离在点云之外(这里不知道作者是怎么得到这个结论的)。为简单起见,作者采用的是固定节点的初始化方法。用均匀分布生成一组节点的坐标作为节点的初始值(这里的均匀分布只的是概率分布里的均匀分布,不是真的均匀排开)。不幸的是,作者实验发现产生个别分离于点云之外的点是不可避免的,这些节点的权值将被置为0。作者又说实验发现网络的鲁棒性能够适应少量这样的点。
作者用来初始化节点的具体方法是势场法
Alogithm 1: Potential field method for SOM initialization 基于势场法的SOM初始化
S S 是 M M 个SOM节点(坐标)组成的集合 S={sj∈R3,j=0,...,M−1} S = { s j ∈ R 3 , j = 0 , . . . , M − 1 } M=m∗m M = m ∗ m
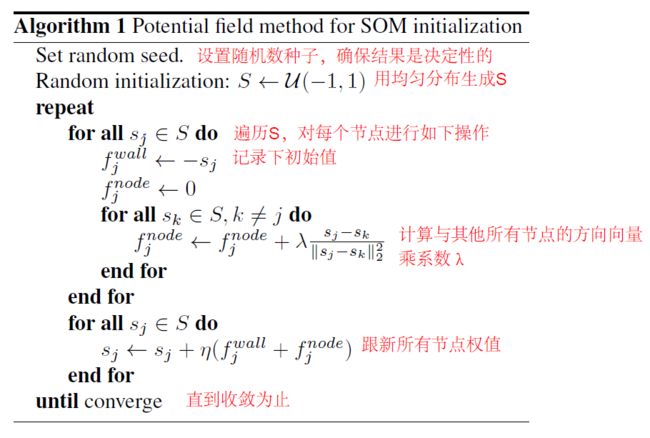
作者解释说,算法的核心是使节点之间相互排斥,同时外加力量使节点趋向初始位置,λ是节点之间斥力及趋向初始位置的权重。注意到算法运行的整个过程只用到了 sj s j ,而 sj s j 是用随机数生成的,这就意味着整个计算和输入无关,这说明这个算法使用来初始化节点位置的。接下来还有学习算法。
分析这个算法,若将λ设置为0,则 fnodej f j n o d e 将恒为0,参数更新退化为 sj←sj+ηfwallj s j ← s j + η f j w a l l , 而 fwallj=−sj f j w a l l = − s j ,于是式子便退化为:
即 sj s j 会以指数衰减,最终收敛到0,所以可以理解为所有点会向圆点收缩。
如果λ不为0,原式子可以化为:
第一项为收缩,第二项为由其他点指向节点j的方向向量之和,将其加到
$s_j$意味着j节点向远离其他节点的方向移动。
由此可知,学习率 η η 越大,向原点收缩的速度越快, ηλ η λ 越大,点与点之间排斥性越强,最后收敛的结果也就越发散。所以 λ λ 最终决定收敛的形状。
实验结果与论文里给出的图还是有一定区别的,论文的图中初始化时比较像球,但是调整几次参数之后发现当刚好把所有点限制在[-1, +1]之内时的参数残生的结果和球差距还是比较大的,可能是论文中还采用了什么trick。不过应该对最终结果影响不是很大。
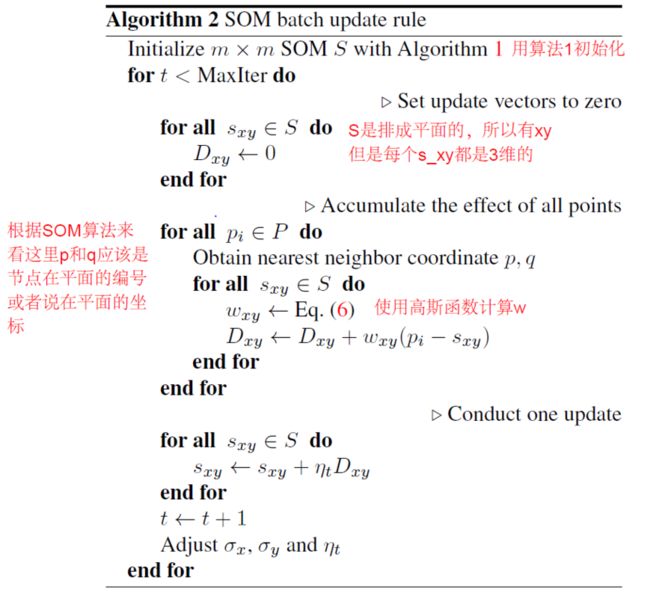
1.2 批量参数更新
与SOM逐点更新不同,批量更新在再计算完点云中所有点的结果后进行更新。就导致每次的更新和输入点的顺序无关。在SOM训练期间,每个训练样本影响获胜的神经元和其拓扑邻域内的神经元。定义邻域的函数是高斯分布函数。
P P 和 S S 分别代表输入点集和SOM节点集,学习率 ηt η t 和邻域半径参数 (σx,σy) ( σ x , σ y ) 随时间逐渐下降,这也符合传统的做法。
实验结果:逐点实现出来时候计算速度挺慢的,毕竟点云数据量还是挺大的。不过这个算法是可以并行的,并行之后速度应该能提升不少