Unity之Vector3.Slerp球形插值原理介绍
先看API:
public static Vector3 Slerp(Vector3 a, Vector3 b, float t);
介绍:通过t数值在from和to之间插值。返回的向量的长度将被插值到from到to的长度之间。
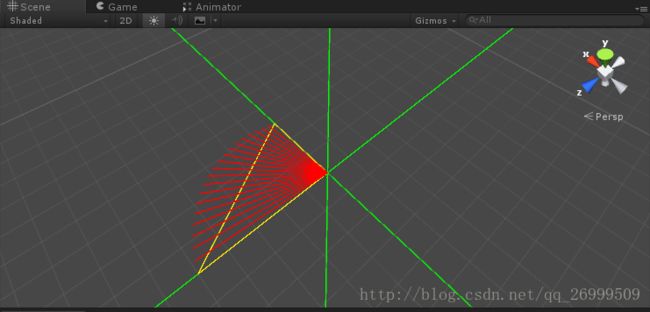
先上一个示意图:

上图的代码如下:
private Vector3 mStart = new Vector3(-1, 1, 0);
private Vector3 mEnd = new Vector3(1, 1, 0);
// Update is called once per frame
private void Update()
{
//绘制坐标轴
Debug.DrawLine(new Vector3(-100, 0, 0), new Vector3(100, 0, 0), Color.green);
Debug.DrawLine(new Vector3(0, -100, 0), new Vector3(0, 100, 0), Color.green);
Debug.DrawLine(new Vector3(0, 0, -100), new Vector3(0, 0, 100), Color.green);
Debug.DrawLine(Vector3.zero, mStart, Color.red);
Debug.DrawLine(Vector3.zero, mEnd, Color.red);
Debug.DrawLine(mStart, mEnd, Color.red);
for (int i = 1; i < 10; ++i)
{
Vector3 drawVec = Vector3.Slerp(mStart, mEnd, 0.1f * i);
Debug.DrawLine(Vector3.zero, drawVec, Color.yellow);
}
}下面先做几次实验来验证下面两个猜想:
1、猜想一:插值的向量的长度是均匀线性变化的
2、猜想二:插值的向量之间的角度是一样大的
上图验证:
实验一:我们在上面代码的基础上加上输出:
//加在for循环里
Debug.Log("插值向量长度:"+ drawVec.magnitude);
Debug.Log("角度:" + Vector3.Angle(drawVec, mStart) / i);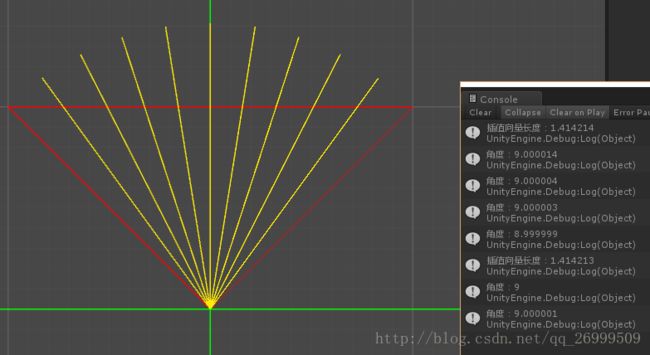
我们发现虽然有误差,但是猜想基本成立,我们修改mStart和mEnd两向量继续实验。
实验二:mStart = (-1,0,0) mEnd = (0,3,4)

从上面可以看出两个猜想成立
这里额外要验证一个问题,就是当两个向量为平行向量时,结果如下,下面直接看图:
(1)mStart = (-1, 0, 0) mEnd = (1, 0, 0)

(2)mStart = (-1, 1, 0) mEnd = (1, -1, 0)

(3)mStart = (-1, 1, 1) mEnd = (1, -1, -1)

那么现在就可以利用这几个结论来自实现Slerp插值了。
下面直接上代码:
代码关键内容如下:
(1)旋转向量函数
(2)旋转矩阵
/// 这里暂时没有对两个向量共线反向的情况进行说明,不过主要实现已经给出来了。但是,我发现一点问题,看图:
(1)v1 = new Vector3(0, 2, 0);v2 = new Vector3(5, 0, 0);

ok,正常
(2)v1 = new Vector3(3, 0, 0);v2 = new Vector3(0, 0, 5);
ok,正常
(3)在RotateTo函数中,数据不精确导致存在误差,也就是我打印v1和v2的叉乘 (图中黄色) 与 (图中红色向量)的叉乘 存在误差,这样其实就是该函数的旋转轴不准确。
以上猜想以及代码实现 没有找到权威认证,如有异议,欢迎探讨。。。
补充:
自己无聊利用Slerp插值画了下面这个图,纯属娱乐。。。

以上知识分享,如有错误,欢迎指出,共同学习,共同进步。