ROS+opencv 人脸,眼睛,手掌识别程序解读
算是第一次在CSDN上写博客,之前在windows下有onenote神器,然而在ubuntu下真的没有找到比较好的记笔记方法,所以来到CSDN这个圣殿来记录一下学习的印记。学习ROS已经有一个月的时间了,曲曲折折,之前的经历和经验会找时间补上。
接下来进入正题,ros与opencv的用法。
首先要配置好launch文件,代码如下:
<launch>
<node pkg="robot_vision" name="eyes_detector" type="eyes_detector.py" output="screen">
<remap from="input_rgb_image" to="/usb_cam/image_raw" />
<rosparam>
haar_scaleFactor: 1.2
haar_minNeighbors: 2
haar_minSize: 40
haar_maxSize: 60
rosparam>
<param name="cascade_1" value="$(find robot_vision)/data/haar_detectors/haarcascade_frontalface_alt.xml" />
<param name="cascade_2" value="$(find robot_vision)/data/haar_detectors/haarcascade_profileface.xml" />
<param name="cascade_3" value="$(find robot_vision)/data/haar_detectors/haarcascade_eye.xml" />
<param name="cascade_4" value="$(find robot_vision)/data/haar_detectors/haarcascade_smile.xml" />
<param name="cascade_5" value="$(find robot_vision)/data/haar_detectors/haarcascade_hand.xml" />
node>
launch>launch文件启动节点就不多讲了,eyes_detecor.py是一会要讲的程序,一会再说 ,rosparam是用来配置ros参数的,其中配置的是haar检测的相关参数,在我上篇转载的文章中有讲述到,下面的五个param是调用事先下载好的haarcascade,这个算法是2001年Viola和Jones提出来的基于Haar特征的级联分类器对象检测算法,想更多了解具体算法的话,自行谷歌。这里面是在github上下载的训练好的cascde,俗话理解就是在这些文件里面已经包含了很多人脸,眼睛的特征,只需要和你的脸进行匹配的算法。
接下来贴上节点代码:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
import cv2
import numpy as np
from sensor_msgs.msg import Image, RegionOfInterest
from cv_bridge import CvBridge, CvBridgeError
class faceDetector:
def __init__(self):
rospy.on_shutdown(self.cleanup);
# 创建cv_bridge
self.bridge = CvBridge()
self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)
# 获取haar特征的级联表的XML文件,文件路径在launch文件中传入
cascade_1 = rospy.get_param("~cascade_1", "") #正脸识别导入
cascade_2 = rospy.get_param("~cascade_2", "") #侧脸识别导入
cascade_3 = rospy.get_param("~cascade_3", "") #眼睛识别导入
cascade_4 = rospy.get_param("~cascade_4", "") #微笑识别导入
cascade_5 = rospy.get_param("~cascade_5", "") #手掌识别导入
# 使用级联表初始化haar特征检测器
self.cascade_1 = cv2.CascadeClassifier(cascade_1)
self.cascade_2 = cv2.CascadeClassifier(cascade_2)
self.cascade_3 = cv2.CascadeClassifier(cascade_3)
self.cascade_4 = cv2.CascadeClassifier(cascade_4)
self.cascade_5 = cv2.CascadeClassifier(cascade_5)
# 设置级联表的参数,优化人脸识别,可以在launch文件中重新配置
self.haar_scaleFactor = rospy.get_param("~haar_scaleFactor", 1.2)
self.haar_minNeighbors = rospy.get_param("~haar_minNeighbors", 2)
self.haar_minSize = rospy.get_param("~haar_minSize", 10)
self.haar_maxSize = rospy.get_param("~haar_maxSize", 30)
self.color_green = (50, 255, 50)
self.color_blue = (0, 0, 255)
# 初始化订阅rgb格式图像数据的订阅者,此处图像topic的话题名可以在launch文件中重映射
self.image_sub = rospy.Subscriber("input_rgb_image", Image, self.image_callback, queue_size=1)
def image_callback(self, data):
# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
frame = np.array(cv_image, dtype=np.uint8)
except CvBridgeError, e:
print e
# 创建灰度图像
grey_image = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 创建平衡直方图,减少光线影响
grey_image = cv2.equalizeHist(grey_image)
# 尝试检测眼睛,手
eye_result = self.detect_eye(grey_image)
hand_result = self.detect_hand(grey_image)
#框出眼睛
if len(eye_result)>0:
for eye in eye_result:
ex,ey,ew,eh =eye
cv2.rectangle(cv_image, (ex, ey), (ex+ew, ey+eh), self.color_green, 2)
#框出手掌
if len(hand_result)>0:
for hand in hand_result:
hx,hy,hw,hh =hand
cv2.rectangle(cv_image, (hx, hy), (hx+hw, hy+hh), self.color_blue, 2)
# 将识别后的图像转换成ROS消息并发布
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))
#检测配置
def detect_eye(self, input_image):
eye = self.cascade_3.detectMultiScale(input_image,
self.haar_scaleFactor,
self.haar_minNeighbors,
cv2.CASCADE_SCALE_IMAGE,
(self.haar_minSize, self.haar_maxSize))
return eye
def detect_hand(self, input_image):
hand = self.cascade_5.detectMultiScale(input_image,
self.haar_scaleFactor,
self.haar_minNeighbors,
cv2.CASCADE_SCALE_IMAGE,
(self.haar_minSize, self.haar_maxSize))
return hand
def cleanup(self):
print "Shutting down vision node."
cv2.destroyAllWindows()
if __name__ == '__main__':
try:
# 初始化ros节点
rospy.init_node("face_detector")
faceDetector()
rospy.loginfo("Face detector is started..")
rospy.loginfo("Please subscribe the ROS image.")
rospy.spin()
except KeyboardInterrupt:
print "Shutting down face detector node."
cv2.destroyAllWindows()python相关的知识就不细说了,要是没学过python的小伙伴可以花几个小时看看语法,很快就会入门了。在py程序当中,需要获取haar特征的级联表的XML文件,文件路径在launch 文件中传入,然后使用级联表初始化haar特征检测器;
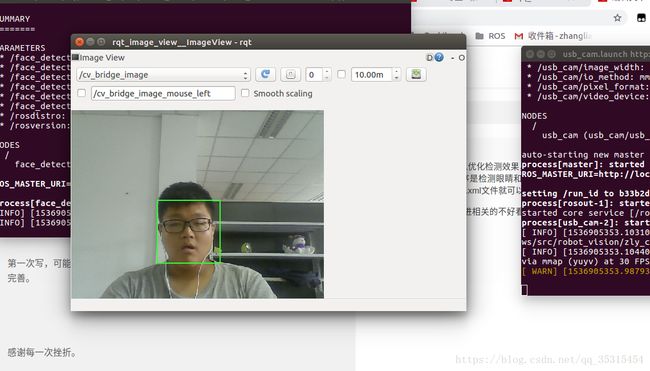
在回调函数中,首先利用cvbridge(ros和opencv的接口)将usb摄像头发布的图像转换成opencv图像,从而在opencv中进行处理;获取opencv图像后先进行灰度化转换,并进行边缘处理和噪声过滤,创建平衡直方图;然后进行眼睛人脸等检测,在检测配置中将事先设置好的参数进行调入;然后利用检测到的边缘,打印方框,框在检测到的眼睛和人脸上;最后再次利用cvbridge,将opencv图像转换成ros图像,最后可以通过rqt来查看效果。
最后划一下重点:
- 下载好haarcascade_xxxx.xml文件,放到工作空间的你知道的位置,下载地址给出:https://github.com/opencv/opencv/tree/master/data/haarcascades,这个里面没有haarcascsde_hand,下载网址:https://github.com/JongJuJu/webcam-hand-detect/blob/master/haarcascade_hand.xml
- launch文件和程序节点中都要导入haarcascade文件
- 通过cvbridge进行ros图像和opencv图像之间的转换
- 配置参数可以优化检测效果,参数讲解在上篇文章
- 我给出的程序是检测眼睛和手掌的,其实其他的都一样,只要加载要检测的haarcascade.xml文件就可以检测了
附上效果图片:



第一次写,可能缩进相关的不好看,也没太组织好语言,之后会继续学习,继续完善。
怕什么真理无穷,进一步有进一步的喜悦。