深度剖析YOLO系列的原理
本文系作者原创,转载请注明出处:https://www.cnblogs.com/further-further-further/p/12072225.html
目录
1. YOLO的作用
2. YOLO(v1,v2,v3)的技术演化
1. YOLO的作用
yolo是当前目标检测最顶级的算法之一,v1版本是2016年提出来的,v2是2017年提出来的,v3是2018年提出的。
官网地址:https://pjreddie.com/darknet/yolo/
说它最牛掰,有两点:
一是因为它采用深层卷积神经网络,吸收了当前很多经典卷积神经网络架构的优秀思想,在位置检测和对象的识别方面,
性能达到最优(准确率非常高的情况下还能达到实时检测)。
二是因为作者还将代码开源了。真心为作者这种大公无私的心胸点赞。
美中不足的是:作者虽然将代码开源,但是在论文介绍架构原理的时候比较模糊,特别是对一些重要改进,基本上是一笔带过。
现在在网络上有很多关于YOLO原理的讲解,个人感觉讲得不是很清楚,总感觉有点知其然而不知其所以然。比如:
yolo是在什么背景下出现的?
v1是在哪个经典网络架构上发展起来的?解决了什么问题?又存在什么问题?
v2针对v1的缺点做了哪些改进?改进后效果怎么样?又存在什么问题?
v3针对v2的缺点做了哪些改进?
这些问题不搞清楚,我觉得对yolo就谈不上真正的理解。废话不多说,下面就来介绍yolo的技术演进。
2. YOLO(v1,v2,v3)的技术演化
问题1:yolo v1是在什么背景下出现的?
yolo v1是在 R-CNN 基础上发展起来的。
R-CNN(region proposals + cnn),采用卷积神经网络进行目标检测的开山之作。
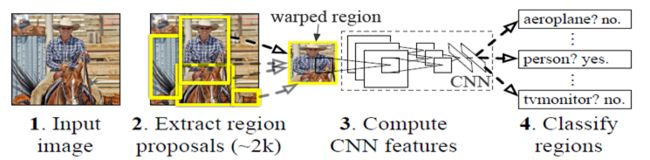
主要思想:对输入图片采用selective search 搜索查询算法,提取出大约 2000 个人眼感兴趣的候选边框,然后每个边框都通过一个独立的
卷积神经网络进行预测输出,后面再加上一个SVM(支持向量机)预测分类。
优点:位置检测与对象分类准确率非常高。
缺点:运算量大,检测速度非常慢,在 GPU 加持下一帧检测时间要 13s 左右,这在工程应用上是不可接受的。
造成速度慢的原因主要有 2 个:
> 用搜索查询算法提取 2000 个候选边框
> 每个候选边框都采用一个独立的CNN通道,这意味着卷积核的参数和全连接的参数都是不一样的,总的参数个数是非常恐怖的。
针对这个缺点,yolo v1做了哪些改进呢。
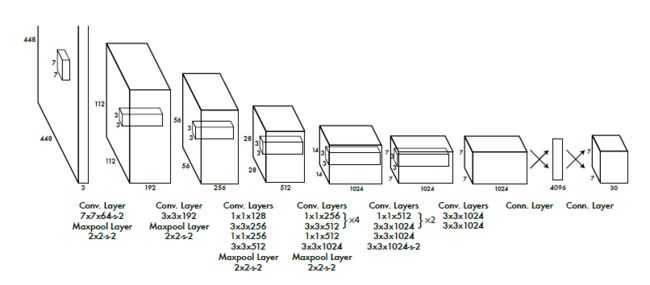
上面的图片是官网论文给出的结构图,但是个人感觉画得不太好,它容易让人误认为对输入图片进行网格化处理,每个网格化的小窗口是 7*7。
真实情况是,由最终输出是 7*7*30 大小代表的物理含义是:你可以把输入图片看成是经过了网格化(grid cell 7*7),每个网格化后的小窗口通过 CNN 预测出 1*30。
这里可能有点不好理解。总之一句话,在真正网络架构流程中,没有对输入图片进行任何网格化处理。
v1 改进点:
> Backbone: googLeNet22 (采用googLeNet22层卷积结构)
> 输入图片只处理一次(yolo名称的由来),通过多个卷积层提取不同的特征,每次卷积的时候共享卷积核参数。
输入图片只处理一次:表示输入图片只在第一次卷积的时候作为输入进行卷积运算,第一次卷积后的输出作为第二次卷积的输入,通过多个卷积层递进的方式来提取不同的特征。
并且这些特征通过的CNN通道都是相同的,从而可以共享卷积核参数。
> 每个 3*3 卷积核前面引入了 1*1 卷积核,作用有两个,一是提取更丰富的特征,二是减少卷积核的参数个数。
大家可能对减少卷积核参数个数的作用比较难以理解,这里举个例子。
比如输入图片大小是 56*56*256 最终转化的目标大小是 28*28*512。
直接卷积:56*56*256 & 3*3*256*512 -> 56*56*512 & pooling -> 28*28*512
卷积核参数:3*3*256*512 = 1179648
引入 1*1 卷积:56*56*256 & 1*1*256*128 -> 56*56*128 & 3*3*128*512 -> 56*56*512 & pooling -> 28*28*512
卷积核参数:1*1*256*128 + 3*3*128*512 = 622592
经过改进后,图片检测速度非常快,基本上可以达到实时。但是缺点是位置检测准确度低,并且不能检测出小对象物体。
针对 v1 的缺点,v2做了哪些改进呢?
v2 改进点:

> Backbone:darknet19 (采用darknet 19层卷积结构)
> 输入图片批归一化处理(BN),作用是降低不是重要特征的重要性。
这句话可能听得有点晕,举个例子,
你的样本里有两个特征列,一个特征列的数值在[1,10]范围内,另一个特征列的数值在[1000,10000]范围内,
但是真实情况是,你的这两个特征列重要性可能是一样的,只不过你拿到的数据就是这样的,我们知道,
卷积神经网络训练,实质就是一系列数值运算的过程,如果你将这两个特征列直接通过卷积神经网络进行训练,
那最终生成的模型准确率肯定是不高的,所以需要进行归一化处理,将数值归一化到[0,1]范围内,
从而是损失能量在收敛的时候更加平稳。
> 采用passthrough算法,解决池化信息丢失的问题,增加细粒度特征的检测(小对象)。

passthrough 算法主要是为了解决 pooling(池化)的缺点,不管是最大值池化,还是平均值池化,都有一个很明显的问题,
就是会造成信息丢失,passthrough 主要思想是在池化之前,将输入信息进行拆分,一拆为四,经过拆分后的大小就和池化后的输出大小相同,
然后叠加,叠加后的结果主要就是维度变化,这样就能解决池化会造成信息丢失的问题。
> 去掉全连接(FC),将输入图片拉伸(resize)到不同尺寸然后通过卷积神经网络,这样就得到了多尺寸的输出,从而能提升对不同大小对象的预测准确度。
全连接其实就是矩阵乘法运算,矩阵乘法有一个前提,矩阵 A 的列必须与矩阵 B 的行个数相同,否则是不能进行矩阵乘法运算的。
全连接的参数大小是固定的,那么你的输入大小自然就固定了,这样就无法实现多尺寸的输出,所以这里去掉了全连接层。
经过改进后,精度提升明显,特别是对小对象的检测,缺点是对小对象检测准确度不高。
针对 v2 的缺点,v3 又做了哪些改进呢?
v3 改进点:

上面是 v3 的结构图,是我跟踪代码,查找资料,绘制这张图真心不容易,正确性绝对有保证,大家如果觉得这张图对你理解 yolo 有帮助,麻烦点个赞。
输入大小这里是416*416,输出13*13,26*26,52*52,这里一般要求输入图片大小是 32 的倍数,因为整个卷积神经网络会将图片缩小32倍,16倍,8倍,
这里取最大公倍数32。 123 = 3*(边框坐标 4 + 置信度 1 + 类对象 36)。
> Backbone: darknet53 (采用darknet 53层卷积结构,实际是52层卷积,去掉了全连接层)
可以看出v3的卷积层数是v2的2.8倍,有个潜在的共识:增加模型准确率的一个直接做法是增加网络的深度和厚度,
(深度是指卷积层数,厚度指卷积核的维度或者是种类数),这里作用自然就是提升精度了。
> 用卷积取代池化
之前我们提到过池化的问题,会造成信息丢失,这里用卷积来实现池化的功能(使图片大小缩小2倍),同时不会造成信息的明显丢失。
> 采用残差网络(resnet)防止梯度消失
梯度消失或者梯度爆炸是在深层的卷积神经网络中才有可能出现的,梯度的计算是通过链式求导得到的,随着网络层的增加,链式求导项就会越来越长,
因为在每一层卷积后的输出都做了归一化处理,所以梯度只会越来越小,有可能为0,而0在后面模块运算中都为0,这样导致的直接后果是:
损失能量在收敛到某一阶段后就停止收敛,最后生成模型的精度自然就不高。而这里采用残差网络就能防止梯度消失,v3结构图里左下角就是残差网络的结构图。
残差网络的思想:每次卷积后的输出当做残差,将卷积前的输入与残差融合,作为整个输出,即使残差为0,整个输出也不会为0。
从残差网络结构图可以看出,每个3*3卷积核前都引入了1*1卷积,这里沿用了v1的思想。
从v3的结构图可以看出,darknet53网络骨架里大量的引入了残差网络的思想。
> 使用空间金字塔池化网络算法(sppnet spatial pyramid pooling)实现多尺寸的输出
空间金字塔池化网络算法主要思想:不同尺寸的输入通过sppnet模块后生成一个固定尺寸的输出。
在v3结构图里,有两个地方用到这个思想:
一个是 13*13*512 经过 1*1 卷积,改变特征维度,变成 13*13*256,经过上采样(upsample,这里采用相邻像素插入算法),
改变特征尺寸,变成 26*26*256,然后与 26*26*512 叠加,生成 26*26*768。
另一个是 26*26*256 与 52*52*256 叠加后生成 52*52*384。
v3的多尺寸输出与v2的多尺寸输出有本质不同,v2多尺寸输出是对输入图片拉伸到不同的尺寸,然后通过卷积神经网络得到不同的输出,
但是这样就存在一个图片失真的问题,因为你是对图片进行的拉伸处理。而v3通过sppnet实现的多尺寸输出,就能有效避免图片失真的问题。
> 13*13*123,26*26*123,52*52*123物理意义
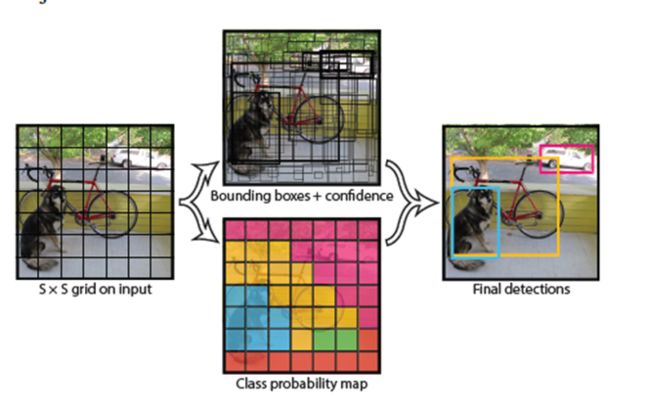
这里用v1版本论文图片来解释,物理意义:
表示将输入图片网格化,有 13*13,26*26,52*52 大小,每个网格化的小窗口(grid cell)预测 3 个边框(bounding box),
每个边框包含 4 个位置坐标,1个置信度,36个对象种类。
123 = 3 *(4 + 1 + 36)
这里就存在一个问题:预测输出如此之多,直接用于损失能量的计算,运算量岂不是很恐怖?
确实是这样,所以这里先经过下面的两个步骤的处理:
(1)每个小窗口只取置信度最大的边框,因为yolo规定,只能有一个真实的对象中心坐标属于每个小窗口。
这样,就得出 13*13*3*41 => 13*13*41,26*26*3*41 => 26*26*41,52*52*3*41 => 52*52*41
13*13*41,26*26*41,52*52*41 表示一个真实对象有很多预测重叠边框,比如说上面图里属于狗的预测边框非常多,
但是我们只需要预测最准确的边框,去掉其他属于狗的重叠边框。
(2)采用NMS(非极大值抑制算法)去除重叠边框。
这样 13*13*41,26*26*41,52*52*41 => N*41 (N表示不同对象预测数目,比如说上面图理想情况下,N = 3)。
> 损失能量(采用交叉熵)
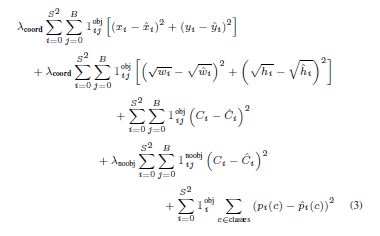
损失能量的计算是v1版本提出来的,这里放到了v3来说,有3个改进点:
(1)将位置检测与对象识别作为一个整体,进行训练预测,这从损失能量的计算可以直接反应出来。
(2)位置的宽度和高度先开根号,与归一化的作用相同,降低不是重要特征的重要性。
(3)增加权重参数  ,当边框预测出含有对象时,增大它的权重值,当边框预测出不含有对象时,减小它的权重值,这样就能使损失能量计算更准确。
,当边框预测出含有对象时,增大它的权重值,当边框预测出不含有对象时,减小它的权重值,这样就能使损失能量计算更准确。
不要让懒惰占据你的大脑,不要让妥协拖垮了你的人生。青春就是一张票,能不能赶上时代的快车,你的步伐就掌握在你的脚下。