「算法」二字听来高深,常常让人望而却步,而《算法图解》是一本对算法初学者友好的书,此书图文并茂,循序渐进的帮我们理清算法中一些基础概念,还介绍了一些有意思的算法及其用途,以提升读者的兴趣,帮助我们步入算法的大门。本书也许不仅仅是一本讲述概念的书,作者还在潜移默化中培养我们的算法思维,从计算机的角度来看待问题。
原书中的示例使用 Python 编写,不过考虑到目前我日常工作中使用最多的还是JavaScript,为了加深自己对相关概念的理解,笔记中我又用 JS 重写了一些示例。
何为算法
算法其实没有那么高深,它只是一组完成任务的指令。任何代码片段都可以视为算法。
算法又没有那么简单,虽然写出来的完成任务的代码都是算法,但是算法也有好坏之分。
算法为何重要
选用合适的算法能大大缩短运算时间。
关于这点,我们来看一个实际的例子。
问题:
从 1 ~ 100 个数中猜出某个我现在想到的数字,我只会告诉你「大了」,「小了」,「对了」,最快需要几次猜到?
解决这个问题有多种方案,如果你运气好,也许1次就猜对了,运气差也许会需要100次。有一种叫做「二分查找」的算法非常适合解决这类问题。
二分查找
定义:
二分查找是一种算法,其输入是一个有序的元素列表,如果元素包含在列表中,二分查找返回其位置,否则返回 null.
分析:
简单查找模式:从1开始往上猜,又称「傻找」,最多会需要99次猜测。
二分查找:每次猜最大,最小数字的中间值,由此每次可排除一般的可能性,最多只需要7次就可猜对。
一般而言,对于包含
n个元素的列表,用二分查找最多需要 ㏒2n步,而简单查找最多需要n步。
代码实现
/* 二分查找 */
function binarySearch(arr = [], item) {
let low = 0,
high = arr.length - 1;
while (low <= high) {
const mid = parseInt((low + high) / 2);
const guess = arr[mid];
if (guess === item) {
return mid;
}
if (guess > item) {
high = mid - 1;
}
if (guess < item) {
low = mid + 1;
}
}
return null;
}
const myList = [1, 3, 5, 7, 9];
console.log(binarySearch(myList, 3));
console.log(binarySearch(myList, 10));
上面提到简单查找模式最多需要 99 次猜测, 而用二分查找最多需要 ㏒ n步,这其实引出了另外一个算法初学者还不算熟悉但很重要的概念 — 运行时间。
算法速度的表征方式 —— 大O表示法
我们都想选用效率最高的算法,以最大限度的减少运行时间或占用空间,换句话说我们想要选用时间复杂度低的算法,大O表示法是一种指明算法的速度有多快的特殊表示法,常常用它来表示时间复杂度。我们继续以上面的例子来说明
比如说我们 1ms 能查看一个元素,下表表现了不同元素个数简单查找和二分查找找到某个元素的时间
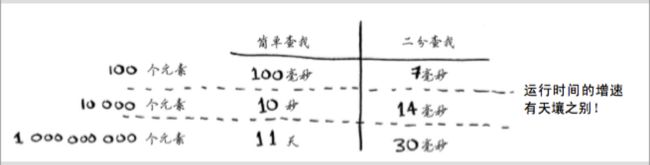
不要误解,大O表示法并非指的是以秒为单位的速度,而是告诉我们运行时间会以何种方式随着运算量的增加而增长,换句话说它指出了算法运行时间的的增速。
例如,假设列表包含 n 个元素。简单查找需要检查每个元素,因此需要执行 n 次操作。使用大O表示法, 这个运行时间为O(n)。O 是 Operation 的简写。
还需要注意的是大O表示法指出的是最糟糕的情况下的运行时间,这种运行时间是一个保证。
一些常见的时间复杂度
算法的时间复杂度往往是以下几种中的一种或者组合,虽然还没有介绍到具体的算法,不过我们可以先就各种时间复杂度留下一个印象。
-
O(log n):也叫对数时间,这样的算法包括二分查找; -
O(n):也叫线性时间,这样的算法包括简单查找; -
O(n * log n): 这种算法包括快速排序 —— 一种速度较快的排序算法; -
O(n²):这样的算法包括选择排序 —— 一种速度较慢的排序算法; -
O(n!): 这样的算法包括难以解决的旅行商问题 —— 一种非常慢的算法。
算法常常和数据结构挂钩。在介绍数据结构之前,我们需要先理解内存的工作原理,这样有助于我们理解数据结构。
常见的数据结构 — 数组和链表
内存的工作原理
我们可以把计算机的内存想象成有很多抽屉的柜子,每个柜子都有其编号。

当需要将数据存储到内存时,我们会请求计算机提供存储空间,计算机会分配一个柜子给我们(存储地址),一个柜子只能存放一样东西,当需要存储多项连续的数据时,我们需要以一种特殊的方法来请求存储空间,这就涉及到两种基本的数据结构—数组和链表。
数组和链表的区别
数组
「数组」这个概念我们很熟悉,在我们的平日的开发过程中会经常用到,不过暂时忘记 JavaScript 中的 Array 吧。我们来看看数组的本质。
使用数组意味着所有的存储事项在内存中都是相连的。
这样做的优点是,如果我们知道某个存储事项的索引,我们只需要一步就能找到其对应的内容。
但是缺点也显而易见,如果计算机开始为我们的数组分配的是一块只能容纳三项的空间,当需要存储第四项的时候,会需要把所有内容整体移动到新的分配区域。如果新的区域再满了,则需要再整体移动到另外一个更大的空区域。因此有时候在数组中添加新元素是很麻烦的一件事情。针对这个问题常见的解决方案时预留空间,不过预留空间也有两个问题:
* 可能浪费空间;
* 预留的空间可能依旧不够用;
链表
链表中的元素可以存储在任何地方,链表的每个元素都存储了下一个元素的地址,从而使得一系列的内存地址串在一起。
我们可以通过一个更形象的比如来理解链表,可以把链表比作一个寻宝游戏,前往某个地点后,会打开一个宝箱,其中有一张纸条上写着下个地点的位置。
考虑到链表的这些性质,链表在「插入元素」方便颇具优势,存储后只需要修改相关元素的指向内存地址即可。当然伴随而来也有劣势,那就是在需要读取链表的最后一个元素时,必须从第一个元素开始查找直至找到最后一个元素。
链表的劣势恰恰是数组的优势,当需要随机读取元素时,数组的效率很高。(数组中的元素存储的内存地址相邻,可容易计算出任意位置的元素的存储位置)。
链表和数组各种操作的时间复杂度对比
| 操作 | 数组 | 链表 |
|---|---|---|
| 读取 | O(1) |
O(n) |
| 插入 | O(n) |
O(1) |
| 删除 | O(n) |
O(1) |
删除只考虑删除,不考虑读取,由于数组支持随机访问,而数组支持随机访问,因此数组用得多。
前面介绍的「二分查找」的前提是查找的内容是有序的,在熟悉了数组和链表后,我们来学习第一种排序算法—选择排序。
选择排序
定义
遍历一个列表,每次找出其中最大的那个值,存入一个新的列表,并从原来的列表中去除该值,直到排完。
时间复杂度
每次遍历的时间复杂度为O(n),需要执行n次,因此总时间为O(n²)。
虽然需要遍历的个数越来越少,平均检查元素数为½*n,但是大O表示法常常忽略常数。
示例代码
function findSmallest(arr) {
let smallest = arr[0];
let smallest_index = 0;
for (let i = 1; i < arr.length; i++) {
if (arr[i] < smallest) {
smallest = arr[i];
smallest_index = i;
}
}
return smallest_index;
}
function selectionSort(arr) {
const newArr = [];
const length = arr.length;
for (let i = 0; i < length; i++) {
const smallestIndex = findSmallest(arr);
debugger
newArr.push(arr.splice(smallestIndex, 1)[0]);
debugger;
}
return newArr;
}
console.log(selectionSort([5, 7, 3, 6, 1, 8])); /* [ 1, 3, 5, 6, 7, 8 ]*/
附:我们可以在VisuAlgo - Sorting (Bubble, Selection, Insertion, Merge, Quick, Counting, Radix)查看选择排序的动态过程。
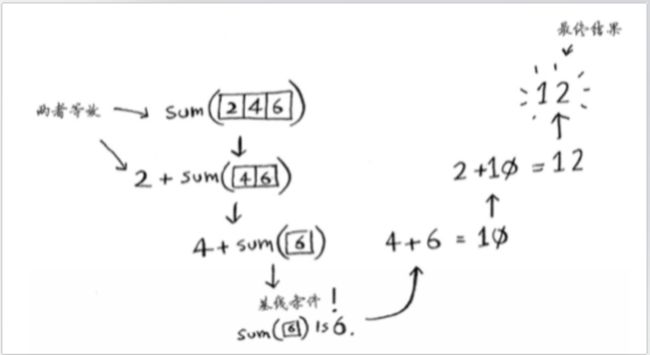
上面的选择排序用到了循环,递归是很多算法都使用的一种编程方法,甚至不夸张的讲,递归是一种计算机思维。
递归
递归是一种优雅的问题解决方法。其优雅体现在它让解决方案更为清晰,虽然在性能上,有些情况下递归不如循环。
如果使用循环,程序的性能可能更高;如果使用递归,程序可能更容易理解。 —- Leigh Caldwell
递归的组成
递归由两部分组成:
- 基线条件(base case):函数不再调用自己的条件
- 递归条件(recursive case): 函数调用自己的条件
上面提到,递归可能存在性能问题,想要理解这一点,需要先理解什么是「调用栈」。
「栈」是一种先入后出(FILO)简单的数据结构。「调用栈」是计算机在内部使用的栈。当调用一个函数时,计算机会把函数调用所涉及到的所有变量都存在内存中。如果函数中继续调用函数,计算机会为第二个函数页分配内存并存在第一个函数上方。当第二个函数执行完时,会再回到第一个函数的内存处。
我们再看看「递归调用栈」:
使用递归很方便,但是也要̶出代价:存储详尽的信息需要占用大量的内存。递归中函数会嵌套执行多层函数,每个函数调用都要占用一定的内存,如果栈很高,计算机就需要存储大量函数调用的信息,这就是为什么有的语言会限制递归最多的层数。
如果所有函数都是尾调用,那么完全可以做到每次执行时,调用记录只有一项,这将大大节省内存。这就是"尾调用优化"的意义。
附:栈和堆的区别
尾调用优化
上面提到的 「选择排序」还是太慢,接下来我们基于递归介绍一种业界通用的排序方法 —— 快速排序。
在正式讲解「快速排序」之前,我们先介绍一下「分而治之」这种方法。
「分而治之 」(divide and conquer D&C )是一种著名的递归式问题解决方法。只能解决一种问题的算法毕竟作用有限,D&C 可能帮我们找到解决问题的思路。
分而治之
运用 D & C 解决问题的过程包括两个步骤:
- 找出基线条件,这种条件必须尽可能简单;
- 不断将问题分解,直到符合基线条件;(每次递归调用都必须缩小问题的规模)
我们以快速排序为例来看看,如何运用分而治之的思维。
快速排序
- 选择基准值
- 将数组分为两个子数组,小于基准值的元素和大于基准值的元素
- 对两个子数组再次运用快速排序
代码实现
const quickSort = (array) => {
if (array.length < 2) {
return array;
}
const pivot = array[0];
const keysAreLessPivot = array.slice(1).filter(key => key <= pivot);
const keysAreMorePivot = array.slice(1).filter(key => key > pivot);
return [...quickSort(keysAreLessPivot), pivot, ...quickSort(keysAreMorePivot)];
};
console.log(quickSort([10, 5, 2, 3])); // [2, 3, 5, 10]
在最糟情况下,栈长为 O(n),而在最佳情况下,栈长为O(log n)。
快速排序的平均时间复杂度为 nlog(n),比选择排序快多了O(n²)。
常见的数据结构 —— 散列表
在编程语言中,存在另外一种和数组不同的复杂数据结构,比如JavaScript中的对象,或 Python 中的 字典。对应到计算机的存储上,它们可能可以对应为 散列表。
要理解散列表,我们需要先看看散列函数。
散列函数
散列函数是一种将输入映射到数字,且满足以下条件的函数:
- 相同的输入会得到相同的输出;
- 不同的输入会映射到不同的数字
散列函数准确的指出了数据的存储位置,能做到这个是因为:
- 散列函数总是将同样的输入映射到相同的索引;
- 散列函数将不同的输入映射到不同的索引;
- 散列函数知道数组有多大,只返回有效的索引;
我们可以把散列表定义为::使用散列函数和数组创建了一种数据结构。::
散列表也被称为 「散列映射」,「映射」,「字典」和「关联数组」。
但是就像上面提到的,需要连续内存位置的数组存储空间毕竟有限,散列表中如果两个键映射到了同一个位置,一般做法是在这个位置上存储一个链表。
散列表的用途
由于散列函数的存在,散列表中数据的查找变得非常快,散列函数值唯一,本身就是一种映射,基于这些,散列表可用作以下用途:
- 模拟映射关系
- 防止重复
- 缓存/记住数据
使用散列表页存在一些注意事项:
- 散列函数很重要,理想的情况下,散列函数将键均匀地映射到散列表的不同位置;
- 如果散列表存储的链表很长,散列表的速度将急剧下降;
散列表的时间复杂度
理想情况下 散列表的操作为O(1),但是最糟情况下,所有操作的运行时间为O(n)
| 操作 | 散列表(平均情况) | 散列表最差情况 | 数组 | 链表 |
|---|---|---|---|---|
| 查找 | O(1) | O(n) | O(1) | O(n) |
| 插入 | O(1) | O(n) | O(n) | O(1) |
| 删除 | O(1) | O(n) | O(n) | O(1) |
在平均情况下,散列表的查找速度和数组一样快,而插入和删除速度和链表一样快,因此它兼具二者的优点。但是在最糟的情况下,散列表的各项操作速度都很慢。
要想让散列表尽可能的快,需要避免冲突。
想要避免冲突,需要满足以下两个条件:
- 较低的填充因子;
- 良好的散列函数;
填装因子 = 散列表包含的元素总数 / 位置总数
如果填装因子大于1 意味着商品数量超过数组的位置数。一旦填装因子开始增大,就需要在散列表中添加位置,这被称为调整长度。
一个不错的经验是,当填装因子大于 0.7 的时候,就调整散列表的长度。
良好的散列函数
良好的散列函数让数组中的值呈均匀分布,不过我们不用担心该如何才能构造好的散列函数,著名的SHA 函数,就可用作散列函数。
在大多数编程语言中,散列表都有内置的实现。下面我们看看散列表的用途。
广度优先搜索
广度优先算法是图算法的一种,可用来找出两样东西之间的最短距离。在介绍这种算法之前,我们先看看什么叫图。
什么是图
图由节点(node)和边(edge)组成,它模拟一组连接。一个节点可能与众多节点直接相连,这些节点被称为邻居。有向图指的是节点之间单向连接,无向图指的是节点直接双向连接。
在编程语言中,我们可以用散列表来抽象表示图

广度优先搜索解决的问题
广度优先搜索用以回答两类问题:
- 从节点A出发,有前往节点B的路径吗?
- 从节点A出发,到节点B的哪条路径最短?
我们还是举例来说明该如何运用 广度优先搜索。
芒果销售商问题
如果你想从你的朋友或者有朋友的朋友中找到一位芒果销售商,涉及关系最短的路径是什么呢?
分析:查看自己的朋友中,是否有芒果销售商,如果没有则检查朋友的朋友,在最近的那一层检查完之前不去检查下一层。
编码实现
const graph = {};
graph.you = ['alice', 'bob', 'claire'];
graph.bob = ['anuj', 'peggy'];
graph.alice = ['peggy'];
graph.claire = ['thom', 'jonny'];
graph.anuj = [];
graph.peggy = [];
graph.thom = [];
const isSeller = name => name[name.length - 1] === 'm';
const search = (name, graph) => {
const iter = (waited, visited) => {
if (waited.length === 0) {
return false;
}
const [current, ...rest] = waited;
if (visited.has(current)) {
return iter(rest, visited);
}
if (isSeller(current)) {
console.log(`${current} is a mango seller!`);
return true;
}
visited.add(current);
const personFriends = graph[current];
return iter([...rest, ...personFriends], visited);
};
return iter(graph[name], new Set());
};
search('you');
上面的编码中涉及到了一种新的数据结构 —— 队列。
队列
队列的工作原理和现实生活中的队列完全相同,可类比为在公交车前排队,队列只支持两种操作:入队 和 出队。
队列是一种先进先出的(FIFO)数据结构。
散列表模拟图
散列表是一种用来模拟图的数据结构
广度优先算法的时间复杂度
广度优先算法的时间复杂度为 O(V+E) 其中V为顶点数,E为边数。
树
提到图就不得不说一种特殊的图 —— 树。

树其实可以看做是所有的边都只能往下指的图。树的用途非常广,还有很多种分支,更多信息可参考
狄克斯特拉算法
广度优先搜索只能找出最短的路径,但是它却并不一定是最快的路径,想要得到最快的路径需要用到狄克斯特拉算法(Dijkstra’s algorithm)
在狄克斯特拉算法算法中,每段路径存在权重,狄克斯特拉算法算法的作用是找出的是总权重最小的路径。
平时我们使用地图软件导航到某个我们不熟悉的地点时,地图软件往往会给我们指出多条路线。直达但是绕圈的公交并不一定会比需要换乘的地铁快。
狄克斯特拉算法的使用步骤如下:
- 画一张表,列出所有节点,并标注出从当前出发可到达节点的值,找出其中最便宜(可最快到达)的节点供第二步使用;
- 更新该节点的到达其所有邻居节点的时间,依据结构修改上面列出的表,检查是否有前往它们的更短路径,如果有,更新其开销,并更新其父节点;
- 重复这个过程,直到对图中的节点都这么做了;
- 统计最终的表格,找出最短的路径;
狄克斯特拉算法涉及到的这种拥有权重的图被称为 「加权图」
不存在权限的图被称为「非加权图」。

狄克斯特拉算法算法只适用于有向无环图。
不能将狄克斯特拉算法算法用于负权边的情况。
编码实现
// the graph
const graph = {};
graph.start = {};
graph.start.a = 6;
graph.start.b = 2;
graph.a = {};
graph.a.fin = 1;
graph.b = {};
graph.b.a = 3;
graph.b.fin = 5;
graph.fin = {};
// The costs table
const costs = {};
costs.a = 6;
costs.b = 2;
costs.fin = Infinity;
// the parents table
const parents = {};
parents.a = 'start';
parents.b = 'start';
parents.fin = null;
let processed = [];
const findLowestCostNode = (itCosts) => {
let lowestCost = Infinity;
let lowestCostNode = null;
Object.keys(itCosts).forEach((node) => {
const cost = itCosts[node];
// If it's the lowest cost so far and hasn't been processed yet...
if (cost < lowestCost && (processed.indexOf(node) === -1)) {
// ... set it as the new lowest-cost node.
lowestCost = cost;
lowestCostNode = node;
}
});
return lowestCostNode;
};
let node = findLowestCostNode(costs);
while (node !== null) {
const cost = costs[node];
// Go through all the neighbors of this node
const neighbors = graph[node];
Object.keys(neighbors).forEach((n) => {
const newCost = cost + neighbors[n];
// If it's cheaper to get to this neighbor by going through this node
if (costs[n] > newCost) {
// ... update the cost for this node
costs[n] = newCost;
// This node becomes the new parent for this neighbor.
parents[n] = node;
}
});
// Mark the node as processed
processed = processed.concat(node);
// Find the next node to process, and loop
node = findLowestCostNode(costs);
}
console.log('Cost from the start to each node:');
console.log(costs); // { a: 5, b: 2, fin: 6 }
并非所有问题都存在最优解
有些时候,我们很难找出最优解,这时候我们可以采用另外一种计算机思维来解决问题 —— 贪婪算法。
贪婪算法指的是每步都采取最优的做法,每步都选择局部最优解,最终的结果一定不会太差。
完美是优秀的敌人。有时候,你只需要找一个能够大致解决问题的算法,此时贪婪算法正好可派上用场,它们的实现很容易,得到的结果又与正确结果接近。这时候采用的算法又被称作近似算法。
判断近似算法优劣的标准如下:
- 速度有多快;
- 得到的近似解和最优解的接近程度;
有的问题也许不存在所谓的最优解决方案,这类问题被称为「NP完全问题」。这类问题以难解著称,如旅行商问题和集合覆盖问题。很多非常聪明的人都认为,根本不可能编写出可快速解决这些问题的算法。对这类问题采用近似算法是很好的方案,能合理的识别NP完全问题,可以帮我们不再无结果的问题上浪费太多时间。
如何识别NP完全问题
以下是NP完成问题的一些特点,可以帮我我们识别NP完全问题:
- 元素较少时,算法的运行速度非常快,但是随着元素的增加,速度会变得非常慢;
- 涉及 所有组合 的问题通常是NP完成问题;
- 不能将问题分解为小问题,必须考虑各种可能的情况的问题,可能是NP完全问题;
- 如果问题涉及到序列且难以解决(旅行商问题中的城市序列),则可能是NP完全问题;
- 如果问题涉及到集合(如广播台集合)且难以解决,可能是NP完全问题;
- 如果问题可转换我集合覆盖问题或者旅行商问题,一定就是NP完全问题;
动态规划
还有一种被称作「动态规划」的思维方式可以帮我们解决问题
这种思维方式的核心在于,先解决子问题,再逐步解决大问题。这也导致「动态规划」思想适用于子问题都是离散的,即不依赖其他子问题的问题。
动态规划使用小贴士:
- 每种动态规划解决方案都设计网格;
- 单元格中的值通常是要优化的值;
- 每个单元格都是一个子问题
附:什么是动态规划?动态规划的意义是什么?—知乎讨论
K最近邻算法
本书对 KNN 也做了简单的介绍,KNN的合并观点如下
- KNN 用于分类和回归,需要考虑最近的邻居。
- 分类就是编组
- 回归就是预测结果
- 特征抽离意味着将物品转换为一系列可比较的数字。
- 能否挑选合适的特征事关KNN算法的成败
进一步的学习建议
读完本书,对算法总算有了一个入门的理解,当然算法还有很多值得深入学习的地方,以下是作者推荐的一些方向。
- 树
- 反向索引:搜索引擎的原理
- 傅里叶变换:傅里叶变换非常适合用于处理信号,可使用它来压缩音乐;
- 并行算法:速度提升并非线性的,并行性管理开销,负载均衡
- MapReduce:是一种流行的分布式算法,可通过流行的开源工具 Apache Hadoop 来使用;
- 布隆过滤器和 HyperLogLog:面对海量数据,找到键对于的值是一个挑战性的事情,布隆过滤器是一种概率性的数据结构,答案可能不对也可能是正确的;其优点在于占用的存储空间很小
- SHA 算法(secure hash algorithm)安全散列函数,可用于对比文件,检查密码
- 局部敏感的散列算法,让攻击者无法通过比较散列值是否类似来破解密码
- Diffie-Hellman 密钥交换
- 线性规划:用于在给定约束条件下最大限度的改善制定的指标
书读完了
《算法图解》确实是一本比较好的算法入门书,不枯燥,又能让人有收获就能激励出人的学习欲望,学习算法单阅读本书肯定还是不够的,
Coursera | Online Courses From Top Universities. Join for Free是一门非常好的算法课,如果感兴趣可以一起学学。
本文在GitHub上的地址,欢迎来一起讨论