Karto_slam源码框架分析
Karto_slam可以说第一次把因子图优化内容用于slam当中,是具有划时代意义的开源激光slam系统。
它的主要贡献有两个:(1)提出了一个效果更好的扫描匹配过程;
(2)利用观测信息、位姿关系构建因子图,求解最佳回环估计。
参考:Karto_slam框架与代码解析
Karto SLAM算法学习
一、整体框架
整体来说,看代码的话,karto代码框架还是比较整洁的,唯一的不好就是把多个类都放在同一个文件下了,造成代码特别庞大,尤其是Mapper.cpp文件,其基本上包含了所有算法核心。
在karto_slam文件夹下,主要关注两个:slam_karto.cpp和spa_solver.cpp;
在open_karto文件夹下,主要关注src文件夹中的Mapper.cpp,其中include里的Mapper.h有地图查找模板的具体实现。
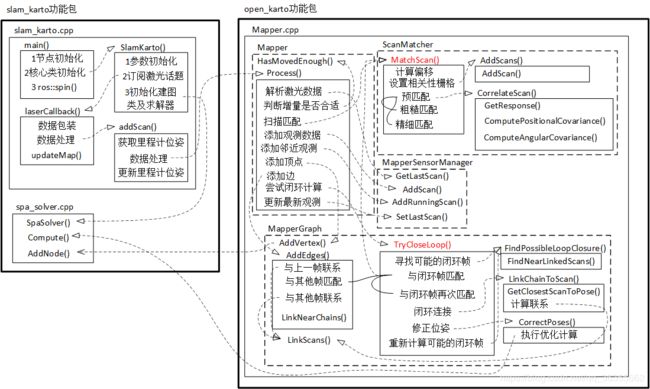
同样的,重要的函数就是标红的函数:MatchScan()和TryCloseLoop()。
KartoSLAM是基于图优化的方法,用高度优化和非迭代 cholesky矩阵进行稀疏系统解耦作为解,图优化方法利用图的均值表示地图,每个节点表示机器人轨迹的一个位置点和传感器测量数据集,箭头的指向的连接表示连续机器人位置点的运动,每个新节点加入,地图就会依据空间中的节点箭头的约束进行计算更新.
二、扫描匹配
匹配的方式是scanTomap,兴趣区域就是矩形形状的submap,也可以将这块区域理解为参考模型。
以里程计估计的位置为中心的一个矩形区域,用以表示最终位置的可能范围,在匹配时,遍历搜索区域,获取响应值最高的位置。
对于激光获得的数据信息,以一定的角分辨率和角偏移值进行投影,获取查找表,用以匹配。
kt_double ScanMatcher::MatchScan(LocalizedRangeScan* pScan, const LocalizedRangeScanVector& rBaseScans, Pose2& rMean,
Matrix3& rCovariance, kt_bool doPenalize, kt_bool doRefineMatch)
{
// set scan pose to be center of grid1. 得到激光帧的传感器位姿
Pose2 scanPose = pScan->GetSensorPose();
// scan has no readings; cannot do scan matching
// best guess of pose is based off of adjusted odometer reading
//扫描没有读数,不能做扫描匹配
//姿势的最佳猜测是基于调整后的里程表读数
if (pScan->GetNumberOfRangeReadings() == 0)
{
rMean = scanPose;
// maximum covariance
rCovariance(0, 0) = MAX_VARIANCE; // XX
rCovariance(1, 1) = MAX_VARIANCE; // YY
rCovariance(2, 2) = 4 * math::Square(m_pMapper->m_pCoarseAngleResolution->GetValue()); // TH*TH
return 0.0;
}
// 2. 得到栅格的尺寸
Rectangle2 roi = m_pCorrelationGrid->GetROI();
// 3. 计算偏移 (in meters - lower left corner)
Vector2 offset;
offset.SetX(scanPose.GetX() - (0.5 * (roi.GetWidth() - 1) * m_pCorrelationGrid->GetResolution()));
offset.SetY(scanPose.GetY() - (0.5 * (roi.GetHeight() - 1) * m_pCorrelationGrid->GetResolution()));
// 4. 设置偏移
m_pCorrelationGrid->GetCoordinateConverter()->SetOffset(offset);
// 设置相关性栅格
AddScans(rBaseScans, scanPose.GetPosition());
// compute how far to search in each direction计算每个方向上的搜索距离
Vector2 searchDimensions(m_pSearchSpaceProbs->GetWidth(), m_pSearchSpaceProbs->GetHeight());
Vector2 coarseSearchOffset(0.5 * (searchDimensions.GetX() - 1) * m_pCorrelationGrid->GetResolution(),
0.5 * (searchDimensions.GetY() - 1) * m_pCorrelationGrid->GetResolution());
// a coarse search only checks half the cells in each dimension粗糙搜索只检查每一维的一半栅格
Vector2 coarseSearchResolution(2 * m_pCorrelationGrid->GetResolution(),
2 * m_pCorrelationGrid->GetResolution());
// actual scan-matching实际的扫描匹配
kt_double bestResponse = CorrelateScan(pScan, scanPose, coarseSearchOffset, coarseSearchResolution,
m_pMapper->m_pCoarseSearchAngleOffset->GetValue(),
m_pMapper->m_pCoarseAngleResolution->GetValue(),
doPenalize, rMean, rCovariance, false);
if (m_pMapper->m_pUseResponseExpansion->GetValue() == true)
{
if (math::DoubleEqual(bestResponse, 0.0))
{
// try and increase search angle offset with 20 degrees and do another match
//尝试增加20度的搜索角度偏移并进行另一次匹配
kt_double newSearchAngleOffset = m_pMapper->m_pCoarseSearchAngleOffset->GetValue();
for (kt_int32u i = 0; i < 3; i++)
{
newSearchAngleOffset += math::DegreesToRadians(20);
bestResponse = CorrelateScan(pScan, scanPose, coarseSearchOffset, coarseSearchResolution,
newSearchAngleOffset, m_pMapper->m_pCoarseAngleResolution->GetValue(),
doPenalize, rMean, rCovariance, false);
if (math::DoubleEqual(bestResponse, 0.0) == false)
{
break;
}
}
}
}
if (doRefineMatch)
{//进行精细匹配
Vector2 fineSearchOffset(coarseSearchResolution * 0.5);
Vector2 fineSearchResolution(m_pCorrelationGrid->GetResolution(), m_pCorrelationGrid->GetResolution());
bestResponse = CorrelateScan(pScan, rMean, fineSearchOffset, fineSearchResolution,
0.5 * m_pMapper->m_pCoarseAngleResolution->GetValue(),
m_pMapper->m_pFineSearchAngleOffset->GetValue(),
doPenalize, rMean, rCovariance, true);
}
assert(math::InRange(rMean.GetHeading(), -KT_PI, KT_PI));
return bestResponse;
}
三、回环估计
回环检测的操作和添加邻近边类似,步骤较为繁琐:
1、依据当前的节点, 从Graph中找到与之相邻的所有节点(一定距离范围内)
2、采取广度优先搜索的方式,将相邻(next)与相连(adjacentVertices)添加进nearLinkedScans.
3、从sensorManager中取从前到后,依据id序号挑选与当前在一定距离范围内,且不在nearLinkedScans中的candidateScans, 当数量达到一定size,返回。
4、loopScanMatcher进行scanTomap的匹配,当匹配response 和covariance达到一定要求认为闭环检测到。得到调整的correct pose。
5、Add link to loop : 调整边(全局闭环)
6、触发correctPose: spa优化
kt_bool MapperGraph::TryCloseLoop(LocalizedRangeScan* pScan, const Name& rSensorName)
{
kt_bool loopClosed = false;
kt_int32u scanIndex = 0;
//寻找可能与当前帧发生闭环的观测帧
LocalizedRangeScanVector candidateChain = FindPossibleLoopClosure(pScan, rSensorName, scanIndex);
while (!candidateChain.empty())
{
Pose2 bestPose;
Matrix3 covariance;
kt_double coarseResponse = m_pLoopScanMatcher->MatchScan(pScan, candidateChain,
bestPose, covariance, false, false);//进行扫描匹配
m_pMapper->FireLoopClosureCheck(stream.str());
if ((coarseResponse > m_pMapper->m_pLoopMatchMinimumResponseCoarse->GetValue()) &&
(covariance(0, 0) < m_pMapper->m_pLoopMatchMaximumVarianceCoarse->GetValue()) &&
(covariance(1, 1) < m_pMapper->m_pLoopMatchMaximumVarianceCoarse->GetValue()))
{
LocalizedRangeScan tmpScan(pScan->GetSensorName(), pScan->GetRangeReadingsVector());
tmpScan.SetUniqueId(pScan->GetUniqueId());
tmpScan.SetTime(pScan->GetTime());
tmpScan.SetStateId(pScan->GetStateId());
tmpScan.SetCorrectedPose(pScan->GetCorrectedPose());
tmpScan.SetSensorPose(bestPose); // This also updates OdometricPose.
kt_double fineResponse = m_pMapper->m_pSequentialScanMatcher->MatchScan(&tmpScan, candidateChain,
bestPose, covariance, false);//再次扫描匹配
m_pMapper->FireLoopClosureCheck(stream1.str());
if (fineResponse < m_pMapper->m_pLoopMatchMinimumResponseFine->GetValue())
m_pMapper->FireLoopClosureCheck("REJECTED!");
else
{
m_pMapper->FireBeginLoopClosure("Closing loop...");
pScan->SetSensorPose(bestPose);
LinkChainToScan(candidateChain, pScan, bestPose, covariance);
CorrectPoses();//执行优化计算,修正位姿
m_pMapper->FireEndLoopClosure("Loop closed!");
loopClosed = true;
}
}
candidateChain = FindPossibleLoopClosure(pScan, rSensorName, scanIndex);
}
return loopClosed;
}