自动驾驶——车道线检测相关数据集整理
自动驾驶视觉方向的分支车道线检测需要的相关数据集
暂时没有好好整理,先作个记录:
1.KITTI
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,主要于算法评测。
KITTI数据采集平台包括2个灰度摄像机,2个彩色摄像机,一个Velodyne 3D激光雷达,4个光学镜头,以及1个GPS导航系统。一共细分为Road, ’City’, ’Residential’, ’Campus’ 和 ’Person’五类数据;包含市区、乡村高速公路的数据,每张图像最多15辆车及30个行人,而且还包含不同程度的遮挡。整个数据集由389对立体图像和光流图,39.2 公里视觉测距序列以及超过200,000 3D标注物体的图像组成。
KITTI数据集中,目标检测包括了车辆检测、行人检测、自行车三个单项,目标追踪包括车辆追踪、行人追踪两个单项,道路分割包括urban unmarked、urban marked、urban multiple marked三个场景及前三个场景的平均值urban road等四个单项;
数据集大小超过200G。KITTI数据集是无人驾驶学术圈使用最广泛的数据集之一了。
项目主页:
http://www.cvlibs.net/datasets/kitti/index.php 。
The road and lane estimation benchmark consists of 289 training and 290 test images. It contains three different categories of road scenes:
uu - urban unmarked (98/100)
um - urban marked (95/96)
umm - urban multiple marked lanes (96/94)
urban - combination of the three above
道路(road)分割和ego-road(lane)分割,并不是车道线标记分割:??
Related Datasets
Multi-Lane-Detection-Dataset: Dataset for multiple lane detection.
Road Scene Layout from a Single Image: Dataset for road area estimation.
MIT Street Scenes: Dataset for semantic road scene understanding.
Cambridge-driving Labeled Video Database (CamVid): Dataset for semantic road scene understanding.
Daimler Scene Labeling Dataset: Dataset for semantic road scene understanding including stereo images.
ROMA (ROad MArkings): Dataset for performance evaluation of road marking extraction algorithms.(Evaluation dataset)
2. Cityscapes
与KITTI不同的是,Cityscapes专注于城市的街景主义理解,其本质就是一个计算机视觉语义分割数据集。提供的下载数据集中测试集和验证集有标注,测试集提供原图,无标注,可以把结果上传到项目主页,然后验证你算法。
Cityscapes包含50个城市不同场景、不同背景、不同季节的街景,提供5000张精细标注的图像、20000张粗略标注的图像、30类标注物体。
https://pan.baidu.com/s/1fsbavgeEWZnrCRZlRHoVNg ;
项目主页:
https://www.cityscapes-dataset.com/ 。
没有车道线标注信息
3. ApolloScape
数据介绍:ApolloScape的标注精细度上超过同类型的KITTI,Cityscapes数据集,也超过UC Berkley最新发布的BDD100K,ApolloScape不仅开放了比Cityscapes等同类数据集大10倍以上的数据量,还包括感知、仿真场景、路网数据等数十万帧逐像素语义分割标注的高分辨率图像数据,进一步涵盖更复杂的环境、天气和交通状况等。
数据集演示视频:
项目主页:
http://apolloscape.auto/
**有车道线标注信息** Lane segmentation:http://apolloscape.auto/lane_segmentation.html4. Mapillary
数据集介绍:共包含25,000个高分辨率图像(分为18,000个用于训练,2,000个验证,5,000个测试;平均分辨率约为900万像素),具有从200万个手动绘制的多边形的像素点注释;100个对象类别,其中60个实例特定(即枚举对象);涵盖北美和南美,欧洲,非洲,亚洲和大洋洲的全球地理覆盖;天气条件(太阳,雨,雪,雾,阴霾)和捕获时间(黎明,白天,黄昏甚至夜晚)的高度变异性;相机传感器范围广泛,焦距变化,图像宽高比以及不同类型的相机噪音;不同的拍摄观点(从道路,人行道和越野)。
注册后下载数据集。数据集演示视频:
项目主页:
https://www.mapillary.com
**含有车道线标记数据**5. BDD100K
数据集介绍:UC Berkeley 发布,包括以下几方面数据:
1. 视频数据:100,000高清视频,累计时长超过1,100个小时,包含GPS位置,IMU数据和时间戳;
2. 马路目标检测数据:标注超过100,000张图像,类别包含公共汽车,交通灯,交通标志,行人,自行车,卡车,摩托车,小汽车,火车和骑手;
3. 马路目标分类数据:超过10,000张像素级道路目标标注的图片;
4. 可行驶区域:提供了100,000张带有像素级可行驶区域的图片;
5车道标记多个城市的100,000张带有标注的图片。。
数据集大小: 1.8TB,需要简单注册并进行邮箱验证之后可以下载。
项目主页:
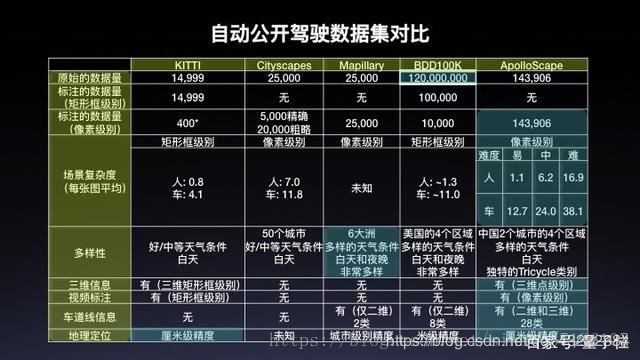
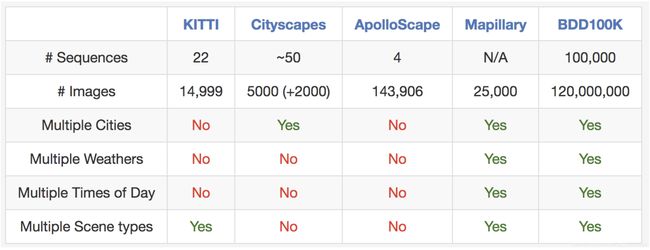
五大自动驾驶数据集比较
6.Tusimple
http://benchmark.tusimple.ai/#/t/1/dataset
https://www.cnblogs.com/oftenlin/p/10670534.html
https://github.com/TuSimple/tusimple-benchmark/issues/3
http://benchmark.tusimple.ai/#/t/1
7.CULane
https://xingangpan.github.io/projects/CULane.html
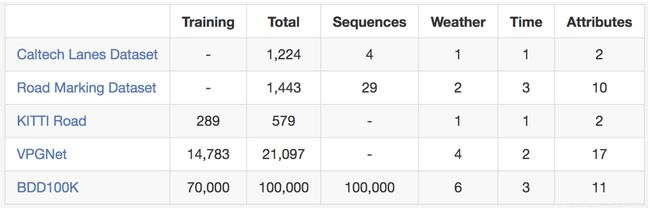
8.Caltech Lanes
http://www.mohamedaly.info/datasets/caltech-lanes
未完待续。。。
参考:https://cloud.tencent.com/developer/news/339575
https://blog.csdn.net/Julialove102123/article/details/80568202