Windows串口通信

串口通信的基本步骤:
- 通过CreateFile("com3") 打开串口
- 通过DCB结构体和SetCommState函数,设置串口的参数
- 通过ReadFile()和WriteFile()读写串口
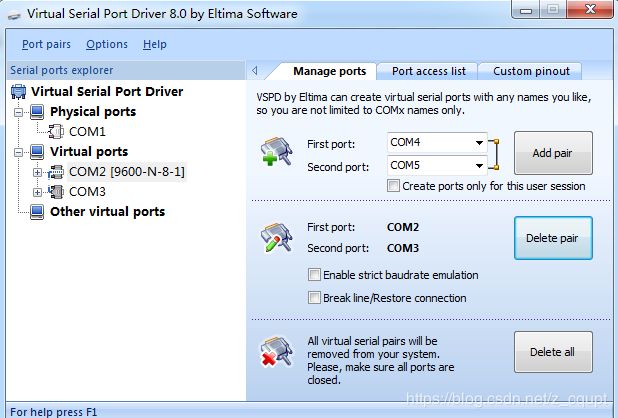
Windows串口通信实例
封装了一个串口通信的C++类CSerial,通过CSerial类的OpenSerialPort()可以打开一个串口,串口打开后后自动新建线程读取串口数据,并通过MessageBox简单的显示出数据。通过CSerial类的SendData()方法可以向串口发送数据。
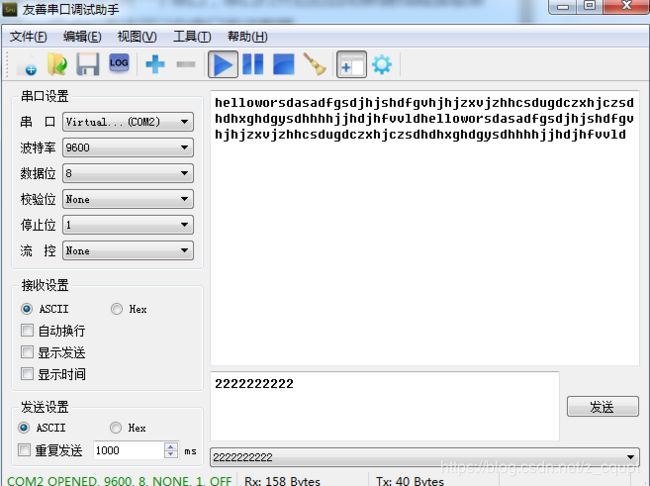
主函数中,新建了一个CSerial类对象,打开串口2,然后简单的通过一个消息框循环来控制向串口不断的发送数据。
程序的效果图如下:
源码如下:
Serial.h
#ifndef _WZSERIALPORT_H
#define _WZSERIALPORT_H
#include
using namespace std;
/*
作者:欧阳伟
日期:2017-12-14
类名:WZSerialPort
用途:串口读写
示例:
WZSerialPort w;
if(w.open("COM1",9600,0,8,1))
{
w.send("helloworld",10);
char buf[1024];
w.receive(buf,1024);
}
*/
class WZSerialPort
{
public:
WZSerialPort();
~WZSerialPort();
// 打开串口,成功返回true,失败返回false
// portname(串口名): 在Windows下是"COM1""COM2"等,在Linux下是"/dev/ttyS1"等
// baudrate(波特率): 9600、19200、38400、43000、56000、57600、115200
// parity(校验位): 0为无校验,1为奇校验,2为偶校验,3为标记校验
// databit(数据位): 4-8,通常为8位
// stopbit(停止位): 1为1位停止位,2为2位停止位,3为1.5位停止位
// synchronizable(同步、异步): 0为异步,1为同步
bool open(const char* portname, int baudrate = 115200, char parity = 0, char databit = 8, char stopbit = 1, char synchronizeflag = 0);
//关闭串口,参数待定
void close();
//发送数据或写数据,成功返回发送数据长度,失败返回0
int send(string dat);
//接受数据或读数据,成功返回读取实际数据的长度,失败返回0
string receive();
private:
int pHandle[16];
char synchronizeflag;
};
#endif Serial.c
#include "Serial.h"
#include
#include
#include
#include
#include
#include
using namespace std;
WZSerialPort::WZSerialPort()
{
}
WZSerialPort::~WZSerialPort()
{
}
bool WZSerialPort::open(const char* portname,
int baudrate,
char parity,
char databit,
char stopbit,
char synchronizeflag)
{
this->synchronizeflag = synchronizeflag;
HANDLE hCom = NULL;
if (this->synchronizeflag)
{
//同步方式
hCom = CreateFileA(portname, //串口名
GENERIC_READ | GENERIC_WRITE, //支持读写
0, //独占方式,串口不支持共享
NULL,//安全属性指针,默认值为NULL
OPEN_EXISTING, //打开现有的串口文件
0, //0:同步方式,FILE_FLAG_OVERLAPPED:异步方式
NULL);//用于复制文件句柄,默认值为NULL,对串口而言该参数必须置为NULL
}
else
{
//异步方式
hCom = CreateFileA(portname, //串口名
GENERIC_READ | GENERIC_WRITE, //支持读写
0, //独占方式,串口不支持共享
NULL, //安全属性指针,默认值为NULL
OPEN_EXISTING, //打开现有的串口文件
FILE_FLAG_OVERLAPPED, //0:同步方式,FILE_FLAG_OVERLAPPED:异步方式
NULL);//用于复制文件句柄,默认值为NULL,对串口而言该参数必须置为NULL
}
if (hCom == (HANDLE)-1)
{
return false;
}
//配置缓冲区大小
if (!SetupComm(hCom, 1024, 1024))
{
return false;
}
// 配置参数
DCB p;
memset(&p, 0, sizeof(p));
p.DCBlength = sizeof(p);
p.BaudRate = baudrate; // 波特率
p.ByteSize = databit; // 数据位
switch (parity) //校验位
{
case 0:
p.Parity = NOPARITY; //无校验
break;
case 1:
p.Parity = ODDPARITY; //奇校验
break;
case 2:
p.Parity = EVENPARITY; //偶校验
break;
case 3:
p.Parity = MARKPARITY; //标记校验
break;
}
switch (stopbit) //停止位
{
case 1:
p.StopBits = ONESTOPBIT; //1位停止位
break;
case 2:
p.StopBits = TWOSTOPBITS; //2位停止位
break;
case 3:
p.StopBits = ONE5STOPBITS; //1.5位停止位
break;
}
if (!SetCommState(hCom, &p))
{
// 设置参数失败
return false;
}
//超时处理,单位:毫秒
//总超时=时间系数×读或写的字符数+时间常量
COMMTIMEOUTS TimeOuts;
TimeOuts.ReadIntervalTimeout = 1000; //读间隔超时
TimeOuts.ReadTotalTimeoutMultiplier = 500; //读时间系数
TimeOuts.ReadTotalTimeoutConstant = 5000; //读时间常量
TimeOuts.WriteTotalTimeoutMultiplier = 500; // 写时间系数
TimeOuts.WriteTotalTimeoutConstant = 2000; //写时间常量
SetCommTimeouts(hCom, &TimeOuts);
PurgeComm(hCom, PURGE_TXCLEAR | PURGE_RXCLEAR);//清空串口缓冲区
memcpy(pHandle, &hCom, sizeof(hCom));//保存句柄
return true;
}
void WZSerialPort::close()
{
HANDLE hCom = *(HANDLE*)pHandle;
CloseHandle(hCom);
}
int WZSerialPort::send(string dat)
{
HANDLE hCom = *(HANDLE*)pHandle;
if (this->synchronizeflag)
{
// 同步方式
DWORD dwBytesWrite = dat.length(); //成功写入的数据字节数
BOOL bWriteStat = WriteFile(hCom, //串口句柄
(char*)dat.c_str(), //数据首地址
dwBytesWrite, //要发送的数据字节数
&dwBytesWrite, //DWORD*,用来接收返回成功发送的数据字节数
NULL); //NULL为同步发送,OVERLAPPED*为异步发送
if (!bWriteStat)
{
return 0;
}
return dwBytesWrite;
}
else
{
//异步方式
DWORD dwBytesWrite = dat.length(); //成功写入的数据字节数
DWORD dwErrorFlags; //错误标志
COMSTAT comStat; //通讯状态
OVERLAPPED m_osWrite; //异步输入输出结构体
//创建一个用于OVERLAPPED的事件处理,不会真正用到,但系统要求这么做
memset(&m_osWrite, 0, sizeof(m_osWrite));
m_osWrite.hEvent = CreateEvent(NULL, TRUE, FALSE, L"WriteEvent");
ClearCommError(hCom, &dwErrorFlags, &comStat); //清除通讯错误,获得设备当前状态
BOOL bWriteStat = WriteFile(hCom, //串口句柄
(char*)dat.c_str(), //数据首地址
dwBytesWrite, //要发送的数据字节数
&dwBytesWrite, //DWORD*,用来接收返回成功发送的数据字节数
&m_osWrite); //NULL为同步发送,OVERLAPPED*为异步发送
if (!bWriteStat)
{
if (GetLastError() == ERROR_IO_PENDING) //如果串口正在写入
{
WaitForSingleObject(m_osWrite.hEvent, 1000); //等待写入事件1秒钟
}
else
{
ClearCommError(hCom, &dwErrorFlags, &comStat); //清除通讯错误
CloseHandle(m_osWrite.hEvent); //关闭并释放hEvent内存
return 0;
}
}
return dwBytesWrite;
}
}
string WZSerialPort::receive()
{
HANDLE hCom = *(HANDLE*)pHandle;
string rec_str = "";
char buf[1024];
if (this->synchronizeflag)
{
//同步方式
DWORD wCount = 1024; //成功读取的数据字节数
BOOL bReadStat = ReadFile(hCom, //串口句柄
buf, //数据首地址
wCount, //要读取的数据最大字节数
&wCount, //DWORD*,用来接收返回成功读取的数据字节数
NULL); //NULL为同步发送,OVERLAPPED*为异步发送
for (int i = 0; i < 1024; i++)
{
if (buf[i] != -52)
rec_str += buf[i];
else
break;
}
return rec_str;
}
else
{
//异步方式
DWORD wCount = 1024; //成功读取的数据字节数
DWORD dwErrorFlags; //错误标志
COMSTAT comStat; //通讯状态
OVERLAPPED m_osRead; //异步输入输出结构体
//创建一个用于OVERLAPPED的事件处理,不会真正用到,但系统要求这么做
memset(&m_osRead, 0, sizeof(m_osRead));
m_osRead.hEvent = CreateEvent(NULL, TRUE, FALSE, L"ReadEvent");
ClearCommError(hCom, &dwErrorFlags, &comStat); //清除通讯错误,获得设备当前状态
//if (!comStat.cbInQue)
// return 0; //如果输入缓冲区字节数为0,则返回false
//std::cout << comStat.cbInQue << std::endl;
BOOL bReadStat = ReadFile(hCom, //串口句柄
buf, //数据首地址
wCount, //要读取的数据最大字节数
&wCount, //DWORD*,用来接收返回成功读取的数据字节数
&m_osRead); //NULL为同步发送,OVERLAPPED*为异步发送
if (!bReadStat)
{
if (GetLastError() == ERROR_IO_PENDING) //如果串口正在读取中
{
//GetOverlappedResult函数的最后一个参数设为TRUE
//函数会一直等待,直到读操作完成或由于错误而返回
GetOverlappedResult(hCom, &m_osRead, &wCount, TRUE);
}
else
{
ClearCommError(hCom, &dwErrorFlags, &comStat); //清除通讯错误
CloseHandle(m_osRead.hEvent); //关闭并释放hEvent的内存
return 0;
}
}
for (int i = 0; i<1024; i++)
{
if (buf[i] != -52)
rec_str += buf[i];
else
break;
}
return rec_str;
}
}
main()
#define _CRT_SECURE_NO_WARNINGS
#include
#include "Serial.h"
#include
using namespace std;
int main()
{
WZSerialPort w;
if (w.open("com3"))
{
string str = "helloworsdasadfgsdjhjshdfgvhjhjzxvjzhhcsdugdczxhjczsdhdhxghdgysdhhhhjjhdjhfvvld";
w.send(str);
cout << w.receive().c_str();
w.close();
}
while (true)
{
}
return 0;
}