LBP特征及其一些变种
说明:本文部分内容转载:http://blog.sina.com.cn/s/blog_631a4cc401013pkn.html
图像纹理是一种重要的视觉手段,是图像中普遍存在而又难以描述的特征。纹理分析技术一直是计算机视觉、图像处理、图像检索等的活跃研究领域。纹理特征提取的目标是:提取的纹理特征维数不大、鉴别能力强、稳健性好,提取过程计算量小,能够指导实际运用。
纹理的定义一直为人们所关注,但是图像纹理定义问题至今没有得到圆满的解决,仍然不存在为众人所公认的定义。其中的共识是一:纹理不同于灰度和颜色等图像特征,它通过像素及其周围空间邻域的灰度分布来表现,即局部纹理信息;二:局部纹理信息不同程度的重复性,即全局纹理信息。
LBP纹理特征因其维度低,计算速度快,能很好的刻画图像的纹理信息而被广泛应用,并且也产生了很多变种。
1 传统LBP
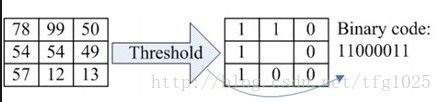
以R为半径的P点邻域,gc为中心,gp为邻域点 ;区分邻域比中心亮度大还是小。其计算公式以及计算示意图如下:
 (计算公式)
(计算公式)
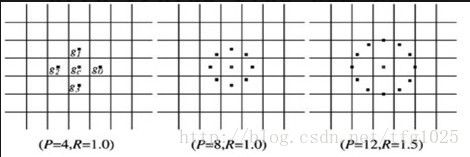
可以通过改变改变P,R 形成多尺度LBP。
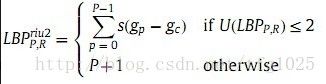
2. uniform LBP P*(P-1)+2个
二值编码中0-1或1-0之间转换次数小于或等于2的编码即为uniform LBP; 计算转换次数的公式如下:
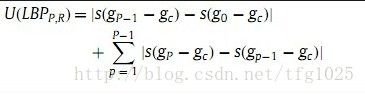
P=8,7*8+2=58个编码值,其余的U>2的归为一个bin

3. 旋转不变的LBP : 36个
由于编码的起始点是一定的,每一种二值编码模式经旋转(循环位移)后会产生不同的编码结果。为了形成旋转不变的编码模式,我们让有同一编码模式经旋转后产生的编码结果编码为同一值,即这些旋转结果中的最小值。
![]()
36个旋转不变的LBP编码模式:
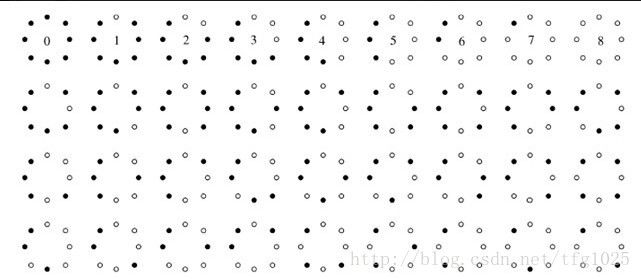
4. 旋转不变的uniform LBP P+1个
即在uniform LBP中,开始7行的每一行为旋转不变,被编为一个编码值,对应上图中第一行的1-7个模式。再加上 全1和全0 共9个
-------------------------------------------以上是经典的LBP,下面是对其一些变种----------------------------------------
变种1、思想:增加幅值信息,增加对噪声鲁棒性
1. LTP
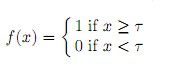
对二值化设定阈值
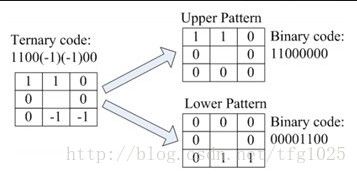
三值编码:使相对中心值变化在t范围内的邻域量化为0;比ic大于t的量化为1;比ic小于t的量化为-1

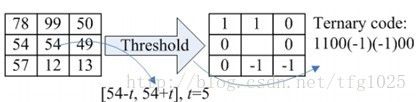
最后把三值编码转化为正的和负的两部分,2个8bit编码作为特征向量;
2. CLBP
像素值差分为符号和幅值两项考虑 ,对符号的编码CLBP_S和LBP一样 ( 8位)
![]()
对差的幅值Mp编码(8位): C为全图像的所有mp的均值

对中心象数值gc编码(2位):Ci为全图像象数均值
![]()
最后构建3D联合直方图CLBP_S/M/C ,列化作为特征向量。
3.Robust local binary pattern RLBP
参考文献:Completed robust local binary pattern for texture classification,2012
求取区域内像素的均值,替代中心像素点的值。

由于ALG对中心像素值的影响考虑不够,有些时候中心像素包含一些重要信息,因此提出带权值Weighted Local Gray Level (WLG),
![]() ,
,
二. 加入局部方差信息(局部对比度)
1. VAR

将每个点的方差作为编码值的权重,进行直方图累加(类比sitf中按方向累计梯度幅值)。原理:方差大,对应区域变化大,为高频区域,对区分性贡献大,所以对应该处编码权重大

三. 增加局部梯度信息(类比SIFT)
1. CS-LBP
对中心对称点的亮度差编码,即编码四方向的梯度符号,缩短编码长度

以下是CS-LBP的两种图示

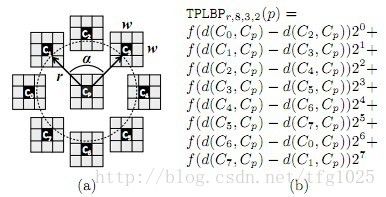
2. TP-LBP
编码某中心像数点的相邻patch的相似度 提取patch-based的信息,是对pixels-based的信息的补充中心patch和邻域patch大小为w*w;邻域半径r,邻域patch个数S,提取相似度信息的邻域间隔a,d(a,b)为a,b patch的相似度,编码局部patch的变化程度

3. POEM
首次提出文献: Face recognition using the POEM descriptor,2012
编码局部区域个方向patch内的梯度变化信息
(1) 计算梯度:方向和大小,对方向离散化m个
(2) 对每点,按离散方向,累积半径为r邻域内的梯度幅值(高斯加权),形成m个累积梯度幅值图像
(3) 对每个图像,计算半径R,邻域P的LBP,形成m个LBP

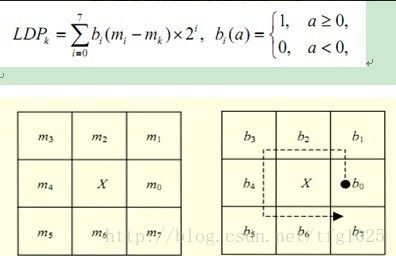
4. LDP
编码每点的各方向边缘响应强度的变化
(1) 计算8方向边缘响应

(2) 取第K主方向值Mk(即第k大的边缘响应幅值)作为阈值,进行二值化形成编码。有C_8_k种编码值
四. 对U-LBP的改进
1. H-LBP
层叠的多多尺度LBP

五. 减少特征冗余,增加对前景与背景颜色变化鲁棒性
参考文献:OBJECT DETECTION USING NON-REDUNDANT LOCAL BINARY PATTERNS,2010
A novel shape-based non-redundant local binary pattern descriptor for object detection,2013
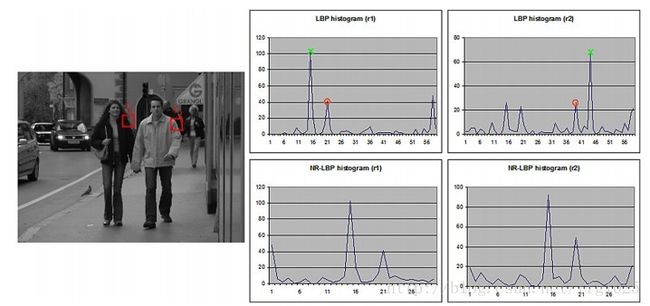
传统的LBP特征之间存在冗余,而且当前景颜色和背景颜色之间是一对相反颜色时候,其描述的纹理信息应该是一样的,然而传统的LBP得到的LBP特征却是不同的。如下图
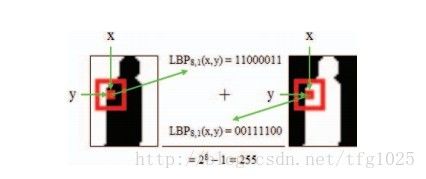
其计算公式如下:
与传统的LBP相比较,NRLBP具有以下优点:
1、维度少,计算速度快。
2、增加了对前景与背景颜色之间差异的鲁棒性
六. 增加时空信息
PBP
参考文献: Pyramid binary pattern features for real-time pedestrian detection from infrared videos,2011
PBP在CS-LBP基础上对齐划分多个层次,然后分别求出各个层次的CS-LBP,利用权值将各层的CS-LBP相加即得到2D的PBP。(类似PHOG)如图:
![]()

如果在对图像求取2D的PBP特征的时候,考虑多帧图像之间的关联,则就形成了3D的PBP,它不仅包含了平面的纹理信息,也包含了时空信息。

![]()

当然对于LBP的研究任然比较热,也还有许多关于LBP的变种