关于SLAM的那些事——实时RGBD_ORB_SLAM (Ubuntu+Xtion)
最近写完了windows上的实时rgbd_slam后,读了些论文,想着怎么改进程序,想在闭环检测的方面尝试一下。最近很火的ORB_SLAM2使用了DBoW2(ORB词袋)的方法,极大的提高了速度和匹配准确度,windows版的orb_slam2还没跑成功(一部分库的编译出现了问题,不过等研究做完了,会继续跑windows版本的),这几天一直在尝试ubuntu版的orb_slam的实时重建,今天终于成功了!~(感谢高博士为我们提供了加了3D建图模块的libORB_SLAM2.so(高博的博客:半闲居士))
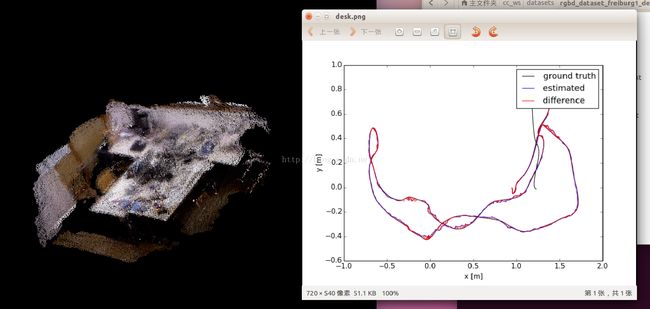
首先orb_slam2的话,github下载源码编译很容易,按照官方github下面的教程走就行。晒几张TUM数据集的结果:
desk:
room:

效果很棒,模拟轨迹和groundtruth的绝对误差真的和论文上说的一样小。我觉得ORB_SLAM2真的是现在视觉SLAM里最优秀的一版,考虑的非常全面。
那么如果我们要用到自己的项目中,该怎么调用呢?特别棒的一点是,原作者提供了libORB_SLAM2.so给我们,加上头文件System.h,我们就可以把ORB_SLAM作为一个整体加到我们的项目中。但是源码中并没有3D建图的模块,需要做相应改变,高博士为我们提供了加了3D建图模块的libORB_SLAM2.so,这时我们就可以根据自己的需求(kinect,xtion或其他可以获得点云的sensors)。高博的博客中有一篇是用的kinect2,在ROS运行的orb_slam2,今天我们来试一试不用ROS,通过OpenNI2直接调用xtion获取rgb数据和depth数据来重建环境(之前有windows上运行openni2_xtion的经验)。我的建议,要么xtion要么kinect2, 因为kinect很鸡肋,xtion比它轻巧,kinect2比它分辨率高。(源码下载csdn 源码下载github)(词袋文件太大,各位可以从官方github下载)
扯了这么多,现在拉回主线。在ORB_SLAM2/Examples/RGB-D/中,创建rgbd_xtion_cc.cpp:
#include
#include
#include
#include
#include
#include
#include
#include
#include // orb_slam2
using namespace std;
using namespace openni;
using namespace cv;
void showdevice(){
// 获取设备信息
Array aDeviceList;
OpenNI::enumerateDevices(&aDeviceList);
cout << "电脑上连接着 " << aDeviceList.getSize() << " 个体感设备." << endl;
for (int i = 0; i < aDeviceList.getSize(); ++i)
{
cout << "设备 " << i << endl;
const DeviceInfo& rDevInfo = aDeviceList[i];
cout << "设备名: " << rDevInfo.getName() << endl;
cout << "设备Id: " << rDevInfo.getUsbProductId() << endl;
cout << "供应商名: " << rDevInfo.getVendor() << endl;
cout << "供应商Id: " << rDevInfo.getUsbVendorId() << endl;
cout << "设备URI: " << rDevInfo.getUri() << endl;
}
}
Status initstream(Status& rc, Device& xtion, VideoStream& streamDepth, VideoStream& streamColor)
{
rc = STATUS_OK;
// 创建深度数据流
rc = streamDepth.create(xtion, SENSOR_DEPTH);
if (rc == STATUS_OK)
{
// 设置深度图像视频模式
VideoMode mModeDepth;
// 分辨率大小
mModeDepth.setResolution(640, 480);
// 每秒30帧
mModeDepth.setFps(30);
// 像素格式
mModeDepth.setPixelFormat(PIXEL_FORMAT_DEPTH_1_MM);
streamDepth.setVideoMode(mModeDepth);
streamDepth.setMirroringEnabled(false); //镜像
// 打开深度数据流
rc = streamDepth.start();
if (rc != STATUS_OK)
{
cerr << "无法打开深度数据流:" << OpenNI::getExtendedError() << endl;
streamDepth.destroy();
}
}
else
{
cerr << "无法创建深度数据流:" << OpenNI::getExtendedError() << endl;
}
// 创建彩色图像数据流
rc = streamColor.create(xtion, SENSOR_COLOR);
if (rc == STATUS_OK)
{
// 同样的设置彩色图像视频模式
VideoMode mModeColor;
mModeColor.setResolution(640, 480);
mModeColor.setFps(30);
mModeColor.setPixelFormat(PIXEL_FORMAT_RGB888);
streamColor.setVideoMode(mModeColor);
streamColor.setMirroringEnabled(false); //镜像
// 打开彩色图像数据流
rc = streamColor.start();
if (rc != STATUS_OK)
{
cerr << "无法打开彩色图像数据流:" << OpenNI::getExtendedError() << endl;
streamColor.destroy();
}
}
else
{
cerr << "无法创建彩色图像数据流:" << OpenNI::getExtendedError() << endl;
}
if (!streamColor.isValid() || !streamDepth.isValid())
{
cerr << "彩色或深度数据流不合法" << endl;
OpenNI::shutdown();
rc = STATUS_ERROR;
return rc;
}
// 图像模式注册,彩色图与深度图对齐
if (xtion.isImageRegistrationModeSupported(
IMAGE_REGISTRATION_DEPTH_TO_COLOR))
{
xtion.setImageRegistrationMode(IMAGE_REGISTRATION_DEPTH_TO_COLOR);
}
return rc;
}
int main(int argc, char **argv)
{
if(argc != 3)
{
cerr << endl << "Usage: ./rgbd_cc path_to_vocabulary path_to_settings" << endl;
return 1;
}
// 创建ORB_SLAM系统. (参数1:ORB词袋文件 参数2:xtion参数文件)
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::RGBD,true);
cout << endl << "-------" << endl;
cout << "Openning Xtion ..." << endl;
Status rc = STATUS_OK;
// 初始化OpenNI环境
OpenNI::initialize();
showdevice();
// 声明并打开Device设备。
Device xtion;
const char * deviceURL = openni::ANY_DEVICE; //设备名
rc = xtion.open(deviceURL);
VideoStream streamDepth;
VideoStream streamColor;
if(initstream(rc, xtion, streamDepth, streamColor) == STATUS_OK) // 初始化数据流
cout << "Open Xtion Successfully!"< 然后在ORB_SLAM2/CMakeLists中添加:
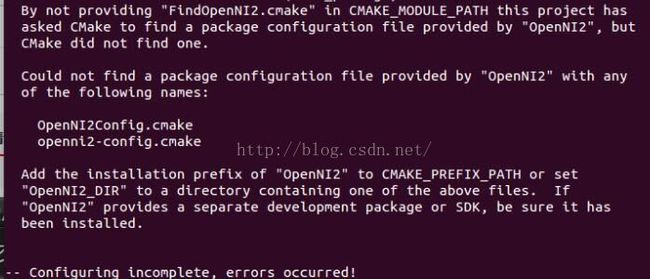
find_package(OpenNI2 REQUIRED)
include_directories("/usr/include/openni2/")
LINK_LIBRARIES( ${OpenNI2_LIBRARY} )
target_link_libraries(${PROJECT_NAME}${OpenNI2_LIBRARY})
add_executable(rgbd_xtion_cc
Examples/RGB-D/rgbd_xtion_cc.cpp)
target_link_libraries(rgbd_xtion_cc ${PROJECT_NAME})然后就可以在ORB_SLAM2/build/里cmake .. 和 make了。完成后可以看到ORB_SLAM2/Examples/RGB-D/里有可执行文件rgbd_xtion_cc。(rgbd_tum是跑TUM数据集的, rgbd_cc是跑自己的数据集的,这两个都是预先采集好彩色图和深度图)
最后在ORB_SLAM2/Examples/RGB-D/里创建xtion的参数文件xtion.yaml (包含了ORB参数信息),大家根据标定(OpenCV,ROS,MATLAB等)结果自行修改内参(rgb内参和畸变):
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. xtion 640*480
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 558.341390
Camera.fy: 558.387543
Camera.cx: 314.763671
Camera.cy: 240.992295
Camera.k1: 0.062568
Camera.k2: -0.096148
Camera.p1: 0.000140
Camera.p2: -0.006248
Camera.k3: 0.000000
Camera.width: 640
Camera.height: 480
# Camera frames per second
Camera.fps: 30.0
# IR projector baseline times fx (aprox.)
Camera.bf: 40.0
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 0
# Close/Far threshold. Baseline times.
ThDepth: 50.0
# Deptmap values factor
DepthMapFactor: 1000.0
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
#--------------------------------------------------------------------------------------------
# PointCloud Mapping
#--------------------------------------------------------------------------------------------
PointCloudMapping.Resolution: 0.01现在来运行吧~ 在ORB_SLAM2/下打开终端,输入 ./Examples/RGB-D/rgbd_xtion_cc Vocabulary/ORBvoc.txt Examples/RGB-D/xtion.yaml 系统加载ORB词袋,然后打开xtion设备,采集图像处理,显示角点,轨迹和点云:
按‘q’或esc程序退出,自动保存估计的轨迹和点云pcd文件到ORB_SLAM2/下(帧数较多时如3000帧,保存时间较长20s左右)。运行pcl_viewer xx.pcd 即可查看。保存优化后的点云的代码在pointcloudmapping.cc里:
globalMap->clear();
for(size_t i=0;iswap( *tmp );
pcl::io::savePCDFileBinary ( "optimized_pointcloud.pcd", *globalMap );
cout<<"Save point cloud file successfully!"< 局部1:
局部2:
局部3:
接下来准备改进词袋,尝试加入3d特征描述words,训练然后提高匹配精准度,拭目以待。
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
#
# Try to find OPenNI2 library and include path.
# Once done this will define
#
#
FIND_PATH( OpenNI2_INCLUDE_PATH OpenNI.h
/usr/include
/usr/local/include
/sw/include
/opt/local/include
DOC "The directory where OpenNI.h resides")
FIND_LIBRARY( OpenNI2_LIBRARY
NAMES OpenNI2 openni2
PATHS
/usr/lib64
/usr/lib
/usr/local/lib64
/usr/local/lib
/sw/lib
/opt/local/lib
DOC "The OpenNI2 library")
IF (OpenNI2_INCLUDE_PATH)
SET( OpenNI2_FOUND 1 CACHE STRING "Set to 1 if OpenNI2 is found, 0 otherwise")
ELSE (OpenNI2_INCLUDE_PATH)
SET( OpenNI2_FOUND 0 CACHE STRING "Set to 1 if OpenNI2 is found, 0 otherwise")
ENDIF (OpenNI2_INCLUDE_PATH)
MARK_AS_ADVANCED( OpenNI2_FOUND )
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
1。Camera.bf中的b指基线baseline(单位:米),f是焦距fx(x轴和y轴差距不大),bf=b*f,和ThDepth一起决定了深度点的范围:bf * ThDepth / fx即大致为b * ThDepth。 基线在双目视觉中出现的比较多,如ORB-SLAM中的双目示例中的EuRoC.yaml中的bf为47.9,ThDepth为35,fx为435.2,则有效深度为47.9*35/435.3=3.85米;KITTI.yaml中的bf为387.57,ThDepth为40,fx为721.54,则有效深度为387.57*40/721.54=21.5米。这里的xtion的IR基线(其实也可以不这么叫)bf为40,ThDepth为50,fx为558.34,则有效深度为3.58米(官方为3.5米)。
2。DepthMapFactor: 1000.0这个很好理解,depth深度图的值为真实3d点深度*1000. 例如depth值为2683,则真是世界尺度的这点的深度为2.683米。 这个值是可以人为转换的(如opencv中的convert函数,可以设置缩放因子),如TUM中的深度图的DepthMapFactor为5000,就代表深度图中的5000个单位为1米。
未来,属于一心想要改变世界的人。
-cc