基于ROS话题发布、接收图像
创建相关软件包
在catkin_ws/src目录下新建软件包并编译:
catkin_create_pkg my_image_transport image_transport cv_bridge
cd …
catkin_make
source devel/setup.bash
创建图像发布者程序
新建my_image_transport/src/my_publisher.cpp:
#include 创建图像订阅者程序
新建my_image_transport/src/my_subscriber.cpp:
#include 创建编译文件 CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(my_image_transport)
add_compile_options(-std=c++11)
find_package(
catkin REQUIRED COMPONENTS
cv_bridge
image_transport
OpenCV REQUIRED
)
set(
LIBS
${OpenCV_LIBS}
${catkin_LIBRARIES})
catkin_package()
include_directories(
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
add_executable(my_publisher my_publisher.cpp)
target_link_libraries(my_publisher ${LIBS})
add_executable(my_subscriber my_subscriber.cpp)
target_link_libraries(my_subscriber ${LIBS})
编写包文件 package.xml
<build_depend>opencv2</build_depend>
<exec_depend>opencv2</exec_depend>
编译软件包
cd ~/catkin_ws
catkin_make
运行节点
ros节点管理器:
roscore
启动发布者节点:
工作空间目录下:source devel/setup.bash
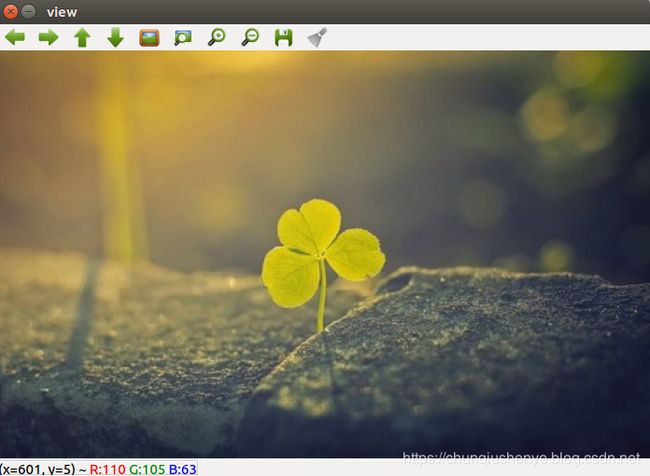
rosrun my_image_transport my_publisher /home/q/图片/三叶草.jpeg
运行订阅者节点:
工作空间目录下:source devel/setup.bash
rosrun my_image_transport my_subscriber
运行结果:
查看当前活动节点、话题及交互情况
ros::init(argc, argv, "image_publisher");
ros::init(argc, argv, "image_listener");
image_transport::Publisher pub = it.advertise("camera/image", 1);
image_transport::Subscriber sub = it.subscribe("camera/image", 1, imageCallback);
查看当前活动节点:rosnode list
/image_listener
/image_publisher
...
查看当前话题:rostopic list
/camera/image
...
查看各节点交互情况:rosrun rqt_graph rqt_graph

ORB_SLAM2 ROS模块结点的编译
export ORB_SLAM2_ROOT_DIR=/home/q/packages/ORB_SLAM2
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/q/packages/ORB_SLAM2/Examples/ROS/ORB_SLAM2
source /home/q/packages/ORB_SLAM2/Examples/ROS/ORB_SLAM2/build/devel/setup.sh
ROS Mono
首先在my_image_transport目录下创建图像发布者程序mono_tum.cpp:
#include mono CMakeLists.txt文件
add_executable(mono_tum src/mono_tum.cpp)
target_link_libraries(mono_tum ${LIBS})
启动 Mono发布者节点
roscore
rosrun my_image_transport mono_tum /home/q/ros_projects/image_transport_catkin_ws/src/my_image_transport/dateset/rgbd_dataset_freiburg1_xyz
这个程序就是用ros把数据集里面的图片以话题`/camera/image_raw`
的形式发布出去,我们打开rviz,订阅这个话题可以看看到图片。
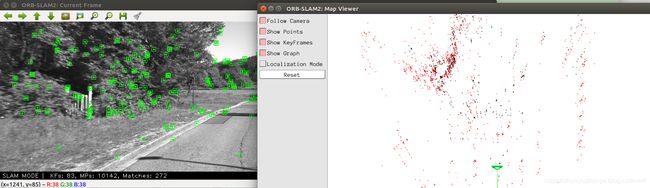
启动 ORB_SLAM2 Mono
rosrun ORB_SLAM2 Mono /home/q/packages/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/q/packages/ORB_SLAM2/Examples/Monocular/TUM1.yaml
这个程序的是订阅

ROS Stereo
首先在my_image_transport目录下创建图像发布者程序
左相机节点stereo_left_kitti.cpp:
http://ttshun.com/2018/08/12/ORB_SLAM2%E5%AD%A6%E4%B9%A0%E4%B9%8B%E8%BF%90%E8%A1%8CROS%E6%A8%A1%E5%9D%97/
http://ttshun.com/2018/05/23/C++%E4%B8%AD%E4%BD%BF%E7%94%A8YAML%E8%AF%AD%E8%A8%80/
http://ttshun.com/2018/08/11/ROS%E5%AD%A6%E4%B9%A0%E4%B9%8BOpenCV%E5%9B%BE%E5%83%8F%E3%80%81ROS%20Image%E8%BD%AC%E6%8D%A2%E6%8E%A5%E5%8F%A3cv_bridge/
更改 ORBSLAM2 下面的 CMakeLists.txt文件
Node for stereo camera ros_stereo_eric
rosbuild_add_executable(Stereo_eric
src/ros_stereo_eric.cc
)
target_link_libraries(Stereo_eric
${LIBS}
)
运行截图: