Computer Vision(C. Rasche)计算机视觉 论文解读(3 Image Processing I: Scale Space, Pyramid and Gradient Image)
目录
3 Image Processing I: Scale Space, Pyramid and Gradient Image
3.1 Scale Space
3.2 Pyramid
3.3 Gradient Image
3.4 Exercises
3 Image Processing I: Scale Space, Pyramid and Gradient Image
对于许多计算机视觉任务,模糊图像并分别分析这些不同的模糊是有用的。 我们已经在上一节中介绍了模糊图像的概念,但是在这里我们重复产生这种模糊,增加的滤波器尺寸到达所谓的比例空间,如图4所示。这个空间将在随后的部分介绍3.1。 然后我们介绍图像金字塔,第3.2节,粗略地说 - 缩小了尺度空间。
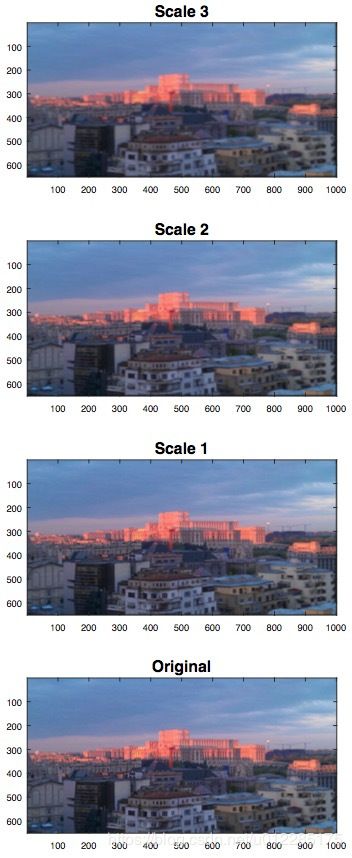
图4:图像的缩放空间。 从底部到顶部观察增加的模糊。
Original: 未经过滤的图像![]() 。
。
Scale 1: 使用高斯滤波器sigma等于1,![]() 来平滑
来平滑![]() 。
。
Scale 2: 使用高斯滤波器![]() 来平滑
来平滑![]() 。
。
Scale 3: 使用高斯滤波器![]() 来平滑
来平滑![]() 。
。
它被称为空间,因为可以将其视为三维空间,第三维对应于具有变量 的细到粗轴。
的细到粗轴。
在较粗的尺度(较大的值)下,更容易找到整体的轮廓和区域,但结构有时会被其他不同的结构所污染。 通常对较粗糙的尺度进行下采样以获得更紧凑的尺度空间表示,从而形成金字塔,参见图5.附录I.2中的代码。
(在这种情况下,分别对每个颜色通道执行滤波,一次用于红色,一次用于绿色,一次用于蓝色图像)
对于许多计算,知道强度景观如何在每个像素处“定向”也是有用的。 具体来说,我们想知道小像素邻域的每个图像像素的“表面斜率”。 这用梯度图像表示,将在3.3节中解释。
3.1 Scale Space
通过将图像与在小邻域中平均的二维滤波器进行卷积来使图像模糊。 在上一节的介绍性示例中,我们仅使用了求和函数,但通常使用高斯滤波器完成图像模糊,就像我们滤波面部轮廓一样(第2.2节)。 这里高斯滤波器是一个二维函数,看起来如图9的前四个补丁所示。它表示为![]() ,其中x和y是图像轴,其中是调节模糊量的标准差- 也称为平滑参数。 在信号处理的语言中,将模糊处理表示为卷积,由星号
,其中x和y是图像轴,其中是调节模糊量的标准差- 也称为平滑参数。 在信号处理的语言中,将模糊处理表示为卷积,由星号 表示。有人说,图像
表示。有人说,图像![]() 由滤波器
由滤波器![]() 进行卷积
进行卷积
![]() (2)
(2)
导致更粗糙的图像![]() 。如果您不熟悉2D卷积过程,请立即阅读附录B.2以熟悉它。
。如果您不熟悉2D卷积过程,请立即阅读附录B.2以熟悉它。
如果重复进行这种模糊,则图像变得越来越粗糙,相应的强度景观变得更加平滑,如图4所示。实际上,有不同的方式到达尺度空间。 最直接的实现是使用尺寸增大的2D高斯重复低通滤波原始图像,首先使用![]() ,然后使用
,然后使用![]() 等。然而,这种方法有点慢并且存在快速实现,为此我们参考附录B.2。
等。然而,这种方法有点慢并且存在快速实现,为此我们参考附录B.2。
得到的图像堆栈,![]() ,称为尺度空间。 在尺度空间的典型图示中,底部图像对应于原始图像; 随后的较高图像对应于较粗略的图像。 换句话说,图像从底部到顶部垂直对齐,并且可以将该对齐视为细到粗轴。 该轴现已标记为
,称为尺度空间。 在尺度空间的典型图示中,底部图像对应于原始图像; 随后的较高图像对应于较粗略的图像。 换句话说,图像从底部到顶部垂直对齐,并且可以将该对齐视为细到粗轴。 该轴现已标记为![]() 。 然后将得到的空间表示为
。 然后将得到的空间表示为
![]() (3)
(3)
轴![]() 可以理解为平滑变量:等于零的
可以理解为平滑变量:等于零的![]() 值对应于原始图像,即,没有平滑;
值对应于原始图像,即,没有平滑; ![]() 值等于1对应于第一粗略图像等。在应用中,sigma值通常在1到5之间,
值等于1对应于第一粗略图像等。在应用中,sigma值通常在1到5之间,![]() 。
。
Application 尺度空间特别用于以下特征检测过程:
- 区域发现:我们可以通过相互减去尺度来轻松确定更亮和更暗的区域,这是我们将在4.1节中返回的技术。
- 跨越尺度(轴)的结构的验证:例如,如果可以在不同尺度上找到特定特征,则不太可能是偶然的,这是一种通常用于特征检测的技术(第6节)。
- 寻找更多“连贯性”:例如,轮廓在较粗糙的尺度上看起来更连续(第4.2节)。
在Matlab中,我们可以使用函数fspecial创建高斯滤波器,并使用命令conv2对图像进行卷积:
Fsc1 = fspecial(’gaussian’, [3 3], 1); % 2D gaussian with sigma=1
Fsc2 = fspecial(’gaussian’, [5 5], 2); % 2D gaussian with sigma=2
Isc1 = conv2(Io, Fsc1, ’same’); % filtering at scale=1图像处理工具箱还提供诸如imgaussfilt和imfilter之类的命令来生成图像模糊,并且可能是首选功能,因为它们针对速度进行了优化。
在Python中,子模块scipy.ndimage包含用于模糊图像的函数gaussian_filter:
scipy.ndimage.gaussian_filter(I, sigma=1.0)
生成这样的尺度空间为我们提供了更多信息,我们打算利用这些信息来改进我们的特征提取。 然而,这种信息增益是以更多内存使用为代价的,因为我们现在拥有多个图像。 并且多个图像在搜索特征时意味着更多的计算。 但是我们可以通过“压缩”粗尺度来减少这种尺度空间,而不会造成太多信息损失,从而导致在下一节中处理金字塔。

图5:图像的多分辨率金字塔。 尺度空间的图像(图4)每隔一个像素进行一次下采样:每个刻度沿着细到粗轴的分辨率减半。
Original: ![]() 原始
原始![]()
Level 1: ![]() 的子采样
的子采样
Level 2: ![]() 的子采样
的子采样
Level 3: ![]() 的子采样
的子采样
它被称为金字塔,因为人们可以对齐图像,使它们形成金字塔 - 为简单起见,我们在正面显示图像。
3.2 Pyramid
使用整个尺度空间S进行操作在计算上是昂贵的,因为它相当大并且在某种程度上是多余的。 因为较粗的尺度不再具有任何精细结构,所以对它们进行二次采样是有意义的:对于每个新的较粗的尺度![]() ,仅沿着水平轴并且沿着垂直轴每秒拍摄一个像素。 我们如此到达
,仅沿着水平轴并且沿着垂直轴每秒拍摄一个像素。 我们如此到达 到
到![]() 级别的(八度)金字塔,参见图5。在更高级别的语言中,我们可以通过选择每隔一行和每列来“手动”下采样,即使用以下方式对采样行进行子采样:
级别的(八度)金字塔,参见图5。在更高级别的语言中,我们可以通过选择每隔一行和每列来“手动”下采样,即使用以下方式对采样行进行子采样:
Idwn = Isc1(1:2:end,:); % sub-sampling rows接下来是子采样列:
Idwn = Idwn(:,1:2:end); % sub-sampling columns在Matlab中还存在函数downsample,但是它仅适用于行 - 如果输入是矩阵; 然后我们需要翻转矩阵以沿着列对其进行下采样。 Matlab还提供函数impyramid,它既可以执行高斯滤波,也可以执行下采样。 但我们也可以操作另一个方向和上采样:
I1 = impyramid(I0,’reduce’); % filter and downsampling every 2nd
I0 = impyramid(I1,’expand’); % upsampling every 2nd如果需要其他向下或向上采样步骤 - 而不是减半和加倍 - 那么函数imresize可能更方便。
Python
skimage.transform.pyramid reduce 和 .pyramid expand
Application 在许多匹配任务中,搜索从金字塔的顶层开始的模式,最小的分辨率,然后向下到底层的工作更有效,这种策略也称为粗到精搜索(或匹配))。 更具体地,仅在以粗略水平进行潜在检测之后,然后通过朝向更精细的水平开始验证,其中由于更高的分辨率,搜索更耗时。
3.3 Gradient Image
梯度图像描述了强度景观中每个点的陡度,更具体地说是景观的局部“表面”是如何倾斜的。 在每个像素处,确定两个度量:斜率的方向,也称为梯度; 斜率的大小-陡度。 因此,梯度图像由两个值的映射组成,即方向和斜率。 该信息最方便地用箭头表示,即作为矢量场,参见图6:箭头的方向对应于梯度; 箭头的长度对应于斜率。

图6:梯度图像。 箭头指向梯度的方向 - 邻域的局部斜率; 箭头的长度对应于梯度的大小。 梯度方向指向高值(白色= 255;黑色= 0)。
(图片描绘的是什么?提示:眯起眼睛产生粗糙的比例。)
为了确定梯度,可以得到两个维度的导数,即沿两个轴的相邻像素之间的差异,分别为![]() 和
和![]() 。 此操作通常使用nabla符号
。 此操作通常使用nabla符号 表示,求梯度运算:
表示,求梯度运算:
![]() (4)
(4)
由此,梯度信息表示为矢量。 我们举例说明:平面上的一个点没有倾斜,因此没有大小和无关的方向 - 梯度为零; 斜率中的点具有特定方向 - 超出![\left [ 0,2\pi \right ]](http://img.e-com-net.com/image/info8/2c4c875374d549258072ae0678d54a7b.gif) 范围的角度值 - 以及表示陡峭度的特定斜率。 使用两个参数(atan2)使用反正切函数计算方向,在大多数软件实现中返回值
范围的角度值 - 以及表示陡峭度的特定斜率。 使用两个参数(atan2)使用反正切函数计算方向,在大多数软件实现中返回值![]() 。 使用毕达哥拉斯公式计算斜率
。 使用毕达哥拉斯公式计算斜率![]() 。
。
直接在原始图像上确定梯度场通常不会返回“有用”结果,因为原始图像通常太嘈杂(不规则)。 因此,通常首先使用小的高斯函数对图像进行低通滤波,例如,在确定其梯度场之前,![]() 。
。
在Matlab中存在常规的imgradient,它立即返回斜率和方向(Image Processing Toolbox); 如果后来在代码中再次需要求导,那么可以使用imgradientxy来获得对应于各个梯度的两个矩阵。 如果我们缺少工具箱,我们可以使用下面的代码片段,其中函数gradient返回两个矩阵 - 图像的大小 - 表示沿两个维度的梯度:
Fg = fspecial(’gaussian’,[3 3],1); % 2D gaussian of size 3x3 with sigma=1
Isc1 = conv2(I, Fg, ’same’);
[Dx Dy] = gradient(single(Isc1)); % gradient along both dimensions
Dir = atan2(-Dy, Dx) + pi; % [-pi,pi]
bk0 = Dir<0; % negative values
Dir(bk0) = Dir(bk0)+2*pi; % [0,2*pi]
Mag = sqrt(Dx.^2+Dy.^2); % gradient magnitude
在示例代码中,角度值被移动到正范围。 可以使用函数quiver绘制梯度场:
% --- Plotting:
X = 1:ISize(2); Y = 1:ISize(1);
figure(1); clf; colormap(gray);
imagesc(I, [0 255]); hold on;
quiver(X, Y, Dx, Dy);在Python中,我们可以用numpy模块中的gradient函数:
Dx, Dy = numpy.gradient(I)Applicaiton 梯度图像用于各种任务,例如边缘检测,特征检测和特征描述(即将出现)。
3.4 Exercises
我们将编写一些函数,但不是将代码立即放入单独的函数脚本中,而是首先在测试脚本中开发代码,我们称之为t_NameOfScript(t for test),因为在脚本中调试比在一个函数脚本调试简单。 一旦我们在脚本中充分开发了代码,我们就将命令复制到一个名为f_NameOfFunction的函数脚本中(函数为f)。 不要删除测试脚本中的代码 - 留在那里! 然后,在测试脚本的末尾应用函数f_NameOfFunction来验证其输出,例如: 通过获取测试脚本中输出的差异和函数脚本的输出。
- 编写脚本t_Pyramid,为图像生成金字塔(例如,参见附录I.2)。 将级别存储在cell或struct中。 用subplot显示金字塔。
- 首先了解滤波器:绘制它们并在中心观察它们的最大值。 使用colorbar绘制每个的尺度。 应用命令imagesc,限制为[0 0.15]。
- 仔细观察滤波后的图像。 不同级别的(强度)范围是多少? 再次使用colorbar来说明。 值为0是什么颜色? 什么是最大值?
- 仔细观察图像边界。 在边界处,不能正确应用滤波器:改为做什么? 有什么选择?
- 最后,将代码放入函数f_Pyramid中。
- 编写一个生成梯度图像的脚本t_GradImg,有关提示,请参见第3.3节。
- 在单独的图像(imagesc)中显示方向和斜率的地图。 使用colorbar验证范围。 斜率值在哪里最大?
- 现在用命令quiver(箭头)显示梯度 - 方向和斜率 - 并将输出放在图像的顶部(不要忘记hold on)。 对于大图像,可能需要很长时间 - 几秒钟 - 才能显示所有箭头。 放大结果以验证输出。 箭头朝哪个方向指向? 在强度图像中向上,向下? 什么测量对应箭头的长度?
- 最后,编写函数f_GradImg,它将图像I作为输入并返回两张地图,一个具有方向值,另一个具有斜率。 返回结构中的地图GM:GM.Dir = Dir,GM.Mag = Mag,以后使用更方便。 现在使用任何(GM.Dir(:) - Dir(:))验证测试脚本末尾的函数:如果为0则可以,如果没有,那么我们可能会出错 - 尽管可能存在四舍五入的差异; 用any(sum(abs(GM.Dir(:) - Dir(:)))> 0.1)验证。
希望本文能帮助你在计算机视觉领域走得更远,学习得更加深入!