使用STM32和AD5420输出4-20mA的电路和程序
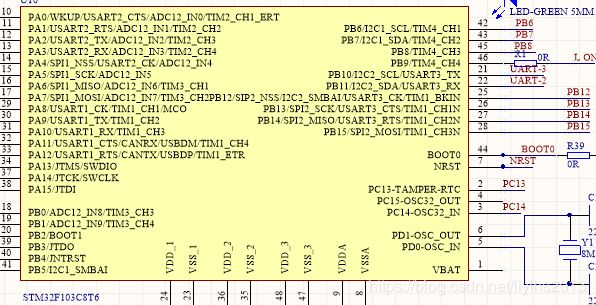
最近在做一个4-20mA输出的项目,遇到一些问题,但是还好顺利解决,使用STM32F103C8T6和AD5420,下面是电路图:
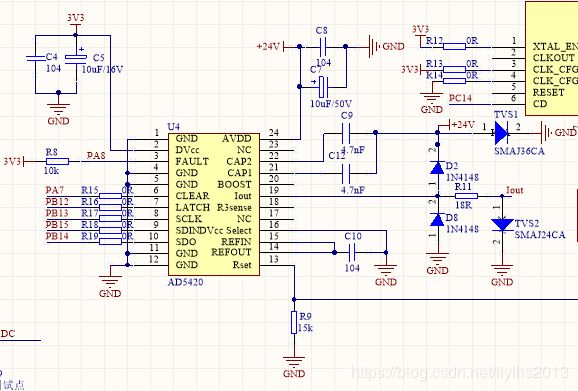
AD5420电路参考datasheet和CN0270,www.analog.com/CN0270.
通讯使用的是官方示例程序移植,官方为4-20mA,我这项目为了有其他模式所以改为0-24mA输出。
程序如下:
头文件如下:
#ifndef __AD5420_IO_H
#define __AD5420_IO_H
//#include "include.h"
//#include "sys.h"
/*----------------------------------------------------------------------
File Name : AD5420_IO.h
Author : Neil Zhao - CAST
Version : V1.0
Date : 1/8/2009
Description : AD5420 Driver Declaration
The AD5410/AD5420 are low-cost, precision, fully integrated
12/16-bit converter offering a programmable current source
output designed to meet the requirements of industrial process
control applications.
China Applications Support Team.
[email protected]
----------------------------------------------------------------------
The present firmware which is for guidance only aims at providing
customers with coding information regarding their products in order
for them to save time. As a result, Analog Devices shall not be
held liable for any direct, indirect or consequential damages with
respect to any claims arising from the content of such firmware and/or
the use made by customers of the coding information contained herein
in connection with their products.
----------------------------------------------------------------------*/
#define SET_CLEAR() GPIO_SetBits(GPIOA,GPIO_Pin_7) //PA7->CLEAR
#define CLR_CLEAR() GPIO_ResetBits(GPIOA,GPIO_Pin_7)
#define SET_LATCH() GPIO_SetBits(GPIOB,GPIO_Pin_12) //PB12->LATCH
#define CLR_LATCH() GPIO_ResetBits(GPIOB,GPIO_Pin_12)
#define SET_SCL() GPIO_SetBits(GPIOB,GPIO_Pin_13) //PB13->SCLK
#define CLR_SCL() GPIO_ResetBits(GPIOB,GPIO_Pin_13)
#define SET_SDO() GPIO_SetBits(GPIOB,GPIO_Pin_15) //PB15->SDIN
#define CLR_SDO() GPIO_ResetBits(GPIOB,GPIO_Pin_15)
//Function that writes to the AD5420 via the SPI port.
//--------------------------------------------------------------------------------
void WriteToAD5420(unsigned char count,unsigned char *Buf);
//Function that reads from the AD7190 via the SPI port.
//--------------------------------------------------------------------------------
void ReadFromAD5420(unsigned char count,unsigned char *buf);
void AD5420_IO_Init();//IO初始化
void delay (int length);
#endif
C文件如下:
/***************************************************************************
Author : Neil Zhao - CAST
Date : Feb 23th, 2009
File : ad5420driver_IO.c
Hardware : ADuC7026 and AD5420
Description : Use the GPIO to simulate the SPI communication of AD5420
***************************************************************************/
#include "AD5420_IO.h"
#include "stm32f10x.h"
//#include "sys.h"
void delay (int length)
{
while (length >0)
length--;
}
//---------------------------------
//void WriteToAD5420(unsigned char count,unsigned char *Buf);
//---------------------------------
//Function that writes to the AD5420 via the SPI port.
//--------------------------------------------------------------------------------
void WriteToAD5420(unsigned char count,unsigned char *Buf)
{
unsigned char ValueToWrite = 0;
unsigned char i = 0;
unsigned char j = 0;
CLR_LATCH();
for ( i=count;i>0;i-- )
{
ValueToWrite = *(Buf+i-1);
for (j=0; j<8; j++)
{
CLR_SCL();
if(0x80 == (ValueToWrite & 0x80))
{
SET_SDO(); //Send one to SDIN pin of AD5420
}
else
{
CLR_SDO(); //Send zero to SDIN pin of AD5420
}
delay(1);
SET_SCL();
delay(1);
ValueToWrite <<= 1; //Rotate data
}
}
CLR_SCL();
delay(1);
SET_LATCH();
delay(20);
}
//---------------------------------
//ReadFromAD5420();
//---------------------------------
//Function that reads from the AD5420 via the SPI port.
//--------------------------------------------------------------------------------
void ReadFromAD5420(unsigned char count,unsigned char *buf)
{
unsigned char i = 0;
unsigned char j = 0;
unsigned int iTemp = 0;
unsigned char RotateData = 0;
CLR_LATCH();
for(j=count; j>0; j--)
{
for(i=0; i<8; i++)
{
CLR_SCL();
RotateData <<= 1; //Rotate data
delay(1);
CLR_SDO(); //write a nop condition when read the data.
iTemp = GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14); //Read SDO of AD5420
SET_SCL();
if(0x00000020 == (iTemp & 0x00000020))
{
RotateData |= 1;
}
delay(1);
}
*(buf+j-1)= RotateData;
}
CLR_SCL();
delay(1);
SET_LATCH();
delay(20);
}
////IO初始化
void AD5420_IO_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
/*根据GPIO_InitStructure中指定的参数初始化外设GPIOx寄存器*/
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
////input:PA7->CLEAR; PB12->LATCH; PB13->SCLK; PB15->SDIN; output:PB14->SDIO; PA8->FAULT
/*Configure SPI*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //PA8 输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; //PB14 输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_15);
GPIO_ResetBits(GPIOA,GPIO_Pin_7);
}
主程序部分如下:
AD5420_IO_Init();
buf[2] = 0x56;//复位寄存器
buf[1] = 0x00; //Disable Slew Rate
buf[0] = 0x01;//复位
WriteToAD5420(3,buf); //Write 551005 to SHIFT REGISTER to write 1005 to control register
delay(2000);
buf[2] = 0x55;//控制寄存器
buf[1] = 0x30;//REXT=1,外部电流设置电阻;OUTEN=1,输出使能;禁能数字压摆率控制;菊花链禁能;0-24mA输出,这里为了有其他模式,可选4-20mA输出,请参考datasheet
buf[0] = 0x07;
WriteToAD5420(3,buf);
delay(2000);
ReadFromAD5420(3,buf); //Read CONTROL REGISTER
buf[2] = 0x01;//数据寄存器
buf[1] = 0x11;
buf[0] = 0x11;
WriteToAD5420(3,buf); //Write 019966H to SHIFT REGISTER to write 9966 to DATA REGISTER
delay(2000);
ReadFromAD5420(3,buf); //Read STATUS REGISTER
buf[2] = 0x01;//数据寄存器
buf[1] = 0x00;
buf[0] = 0x00;//0mA
WriteToAD5420(3,buf);
delay(2000);
buf[2] = 0x01;//数据寄存器
buf[1] = 0x15;
buf[0] = 0x55;//2mA
WriteToAD5420(3,buf);
delay(2000);
buf[2] = 0x01;//数据寄存器
buf[1] = 0x2A;
buf[0] = 0xAA;//4mA
WriteToAD5420(3,buf);
delay(2000);
buf[2] = 0x01;//数据寄存器
buf[1] = 0x6A;
buf[0] = 0xAA;//10mA
WriteToAD5420(3,buf);
delay(2000);
buf[2] = 0x01;//数据寄存器
buf[1] = 0xD5;
buf[0] = 0x55;//20mA
WriteToAD5420(3,buf);
delay(2000);
buf[2] = 0x01;//数据寄存器
buf[1] = 0xFF;
buf[0] = 0xFF;//24mA
WriteToAD5420(3,buf);
delay(2000);测试使用fluke 15B串联在IOUT和GND,10mA为9.98mA,24mA为23.93,误差为0.3%,datasheet标示为0.15%,还算可以,跟硬件和万用表有关。