用STM32F103获取ADS1220模数转换的值,以及C#做上位机的笔记
ADS1220
ADS1220是一款具有四通道的,24bit的模数转换器,其中两两可以组成差分输入,内部有可以编程的放大器,最大的放大倍数是128。
ADS1220的数据交换是通过SPI总线进行数据交换的,SPI工作在模式1。CPOL为0空闲时为低电平,CPHA为1,第二个边沿触发。
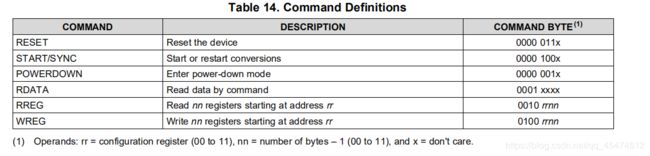
ADS的指令:
寄存器0:关于通道以及增益的配置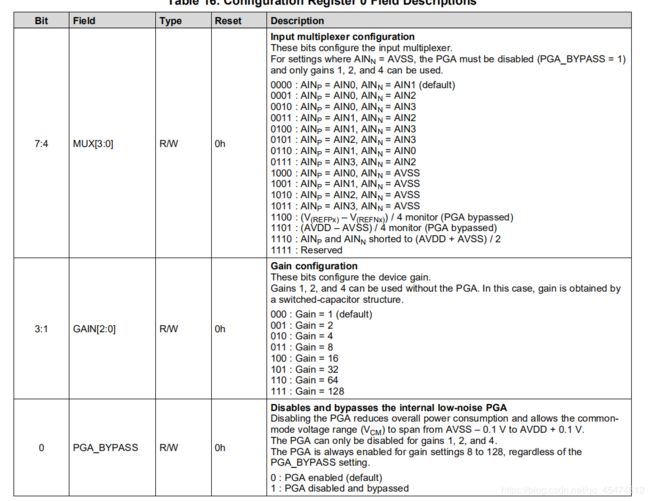
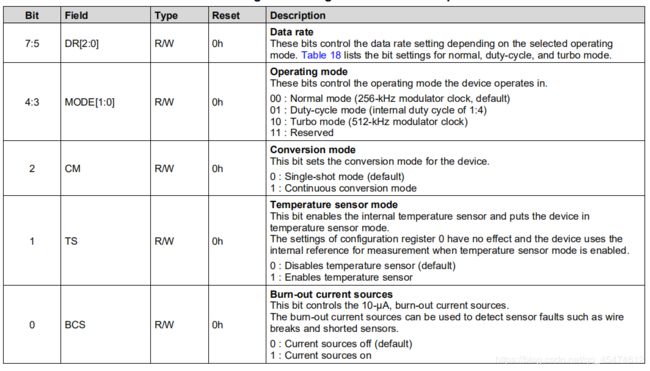
寄存器1:关于转换速度的配置:
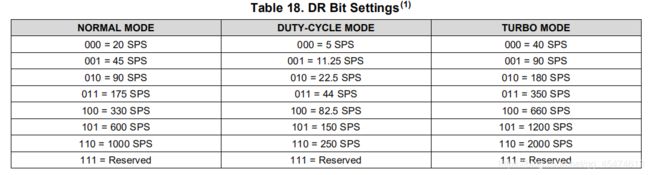
不同工作模式下的转换速度:
寄存器2:内部参考电压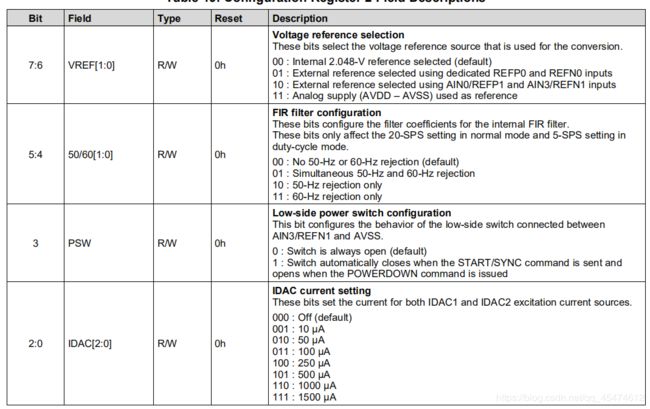
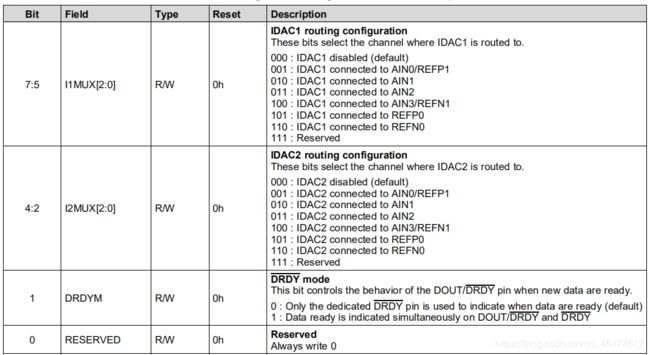
寄存器3:
STM32的配置
SPI的配置
static void ads_init(void)
{
/*APB BUS INIT*/
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_GPIOD);
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_GPIOA);
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_GPIOB);
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_SPI1);
/**SPI GPIO Configuration
PA5 ------> SPI1_SCK
PA6 ------> SPI1_MISO
PA7 ------> SPI1_MOSI
PA4 ------> SPI1_NSS
*/
LL_GPIO_SetPinMode(GPIOA,LL_GPIO_PIN_4,LL_GPIO_MODE_OUTPUT);
LL_GPIO_SetPinOutputType(GPIOA,LL_GPIO_PIN_4,LL_GPIO_OUTPUT_PUSHPULL);
LL_GPIO_SetPinSpeed(GPIOA,LL_GPIO_PIN_4,LL_GPIO_SPEED_FREQ_HIGH);
SPI1_DISENABLE;
LL_GPIO_SetPinMode(GPIOA,LL_GPIO_PIN_5,LL_GPIO_MODE_ALTERNATE);
LL_GPIO_SetPinOutputType(GPIOA,LL_GPIO_PIN_5,LL_GPIO_OUTPUT_PUSHPULL);
LL_GPIO_SetPinSpeed(GPIOA,LL_GPIO_PIN_5,LL_GPIO_SPEED_FREQ_HIGH);
LL_GPIO_SetPinMode(GPIOA,LL_GPIO_PIN_7,LL_GPIO_MODE_ALTERNATE);
LL_GPIO_SetPinOutputType(GPIOA,LL_GPIO_PIN_7,LL_GPIO_OUTPUT_PUSHPULL);
LL_GPIO_SetPinSpeed(GPIOA,LL_GPIO_PIN_7,LL_GPIO_SPEED_FREQ_HIGH);
LL_GPIO_SetPinMode(GPIOA,LL_GPIO_PIN_6,LL_GPIO_MODE_FLOATING); //SPI1 GPIO INIT
}
SPI的数据收发
void ads_Reset()
{
SPI1_ENABLE;
uint32_t time_out = 0;
LL_SPI_TransmitData8( SPI1, ADS1220_RESET_CMD);
while ((!LL_SPI_IsActiveFlag_TXE(SPI1))&&time_out<0xfffff)
{
time_out++;
}
time_out = 0;
while ((!LL_SPI_IsActiveFlag_RXNE(SPI1))&&time_out<0xfffff)
{
time_out++;
}
(void)LL_SPI_ReceiveData8(SPI1);
SPI1_DISENABLE;
}
void ads_Start()
{
uint32_t time_out = 0;
SPI1_ENABLE;
LL_SPI_TransmitData8( SPI1, ADS1220_START_CMD);
while ((!LL_SPI_IsActiveFlag_TXE(SPI1))&&time_out<0xfffff)
{
time_out++;
}
time_out = 0;
while ((!LL_SPI_IsActiveFlag_RXNE(SPI1))&&time_out<0xfffff)
{
time_out++;
}
(void)LL_SPI_ReceiveData8(SPI1);
SPI1_DISENABLE;;
}
void ads_SetREG(uint8_t *w_data,uint8_t data_size,uint8_t begin_addr)
{
/*
Note the value of the array,Prevent pointer overflow
bit3|bit2 is begin addr
bit1|bit0 is number of data after the addr
*/
uint32_t time_out = 0;
if((begin_addr + data_size)>4)
{
return ;
}
else
begin_addr = ADS1220_WREG_CMD|( begin_addr << 2 ) + data_size -1;
SPI1_ENABLE;
LL_SPI_TransmitData8(SPI1, begin_addr);
while ((!LL_SPI_IsActiveFlag_TXE(SPI1))&&time_out<0xfffff)
{
time_out++;
}
time_out = 0;
while ((!LL_SPI_IsActiveFlag_RXNE(SPI1))&&time_out<0xfffff)
{
time_out++;
}
(void)LL_SPI_ReceiveData8(SPI1);
time_out = 0;
for(uint8_t i = 0;i<data_size;i++)
{
LL_SPI_TransmitData8(SPI1, *w_data);
while ((!LL_SPI_IsActiveFlag_TXE(SPIx))&&time_out<0xfffff)
{
time_out++;
}
time_out = 0;
while ((!LL_SPI_IsActiveFlag_RXNE(SPI1))&&time_out<0xfffff)
{
time_out++;
}
(void)LL_SPI_ReceiveData8(SPI1);
w_data ++;
}
SPI1_DISENABLE;
}
void ads_GetREG(uint8_t *r_data,uint8_t size, uint8_t begin_addr)
{
/*
Note the value of the array,Prevent pointer overflow
bit3|bit2 is begin addr
bit1|bit0 is number of data after the addr
*/
uint32_t time_out = 0;
if((begin_addr + size)>4)
{
return ;
}
else
begin_addr = ADS1220_RREG_CMD|( begin_addr << 2 ) + size -1;
SPI1_ENABLE;
LL_SPI_TransmitData8(SPI1, begin_addr);
while ((!LL_SPI_IsActiveFlag_TXE(SPI1))&&time_out<0xfffff)
{
time_out ++;
}
time_out = 0;
while ((!LL_SPI_IsActiveFlag_RXNE(SPI1))&&time_out<0xfffff)
{
}
(void)LL_SPI_ReceiveData8(SPI1);
time_out = 0;
for(uint8_t i = 0;i<size;i++)
{
LL_SPI_TransmitData8(SPI1,0x00);
while ((!LL_SPI_IsActiveFlag_TXE(SPI1))&&time_out<0xfffff)
{
time_out ++;
}
time_out = 0;
while ((!LL_SPI_IsActiveFlag_RXNE(SPI1))&&time_out<0xfffff)
{
time_out ++;
}
*r_data=LL_SPI_ReceiveData8(SPI1);
r_data ++;
}
SPI1_DISENABLE;;
}
void ads_GetData(uint8_t *r_data)
{
/*
Note the value of the array,Prevent pointer overflow
bit3|bit2 is begin addr
bit1|bit0 is number of data after the addr
*/
uint32_t time_out = 0;
SPI1_ENABLE;
LL_SPI_TransmitData8(SPI1, ADS1220_RDATA_CMD);
while ((!LL_SPI_IsActiveFlag_TXE(SPI1))&&time_out<0xffff)
{
time_out++;
}
time_out = 0;
while ((!LL_SPI_IsActiveFlag_RXNE(SPI1))&&time_out<0xffff)
{
time_out++;
}
(void)LL_SPI_ReceiveData8(SPI1);
time_out = 0;
for(uint8_t i = 0;i<3;i++)
{
LL_SPI_TransmitData8(SPI1,0xFF);
while ((!LL_SPI_IsActiveFlag_TXE(SPI1))&&time_out<0xffff)
{
time_out++;
}
time_out = 0;
while ((!LL_SPI_IsActiveFlag_RXNE(SPI1))&&time_out<0xffff)
{
time_out++;
}
*r_data=LL_SPI_ReceiveData8(SPI1);
r_data ++;
}
SPI1_DISENABLE;
}
C#
1.将一组字符串转换为,二进制数组
string s = "123456";
var bt = Regex.Matches(s, @"[a-fA-F0-9]{2}").Cast<Match>().Select(t => (byte)Convert.ToInt32(t.Value, 16)).ToArray();//不是很懂不知道有人交流一下么
开一个线程
cbbBaudrates.SelectedIndex = 3;
ThreadCapture = new Thread(MyStaticThreadCapture);
ThreadCapture.Start(); // 只要使用Start方法,线程才会运行